

осн. киб лекц
.pdf
|
V |
|
n = 2 |
n = 1 |
n = 5 |
|
|
|
|
|
U |
n = 3 |
n = 4 |
|
Рис. 6.22 Годограф Михайлова
Признаком неустойчивости системы является нарушение числа и последовательности прохождения квадрантов.
Примеры годографа Михайлова для неустойчивых систем представлены на рис. 6.23.
Для нейтральных систем годограф Михайлова изображен на рис. 6.24. В первых двух случаях небольшие деформации выводят систему на устойчивость, в последнем же система неустойчива.
V |
а) |
V |
б) |
V |
в) |
n = 3 |
|
|
n = 5 |
|
n = 4 |
|
|
|
|
||
|
U |
|
U |
|
U |
Рис. 6.23 Годографы Михайлова для неустойчивых систем:
а– начинается на отрицательной действительной полуоси;
б– не обходит n-квадрантов координатной плоскости;
в– не охватывает начало координат
V |
|
|
а) |
V |
|
б) |
V |
в) |
||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
U |
|
U |
|||
|
|
n = 4 |
|
|
n = 4 |
|
n = 4 |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.24 Годограф Михайлова нейтральных систем:
а, б – система может быть устойчива; в – система неустойчива
Построение годографа Михайлова практически производится либо методом контрольных точек, либо методом вспомогательных годографов. Первый метод сводится к определению ряда точек годографа Михайлова, соответствующих фиксированным значениям частоты. При втором методе определяются годографы отдельных звеньев, применяя правила сложения и умножения векторов, строят искомый годограф.
Анализируя годограф Михайлова, можно установить следующее: когда годограф Михайлова последовательно проходит квадранты, то вещественная и мнимая оси пересекаются поочередно. В точках пересечения с вещественной осью обращается в нуль мнимая функция V(ω), а в точках пересечения кривой с мнимой осью действительная функция U(ω).
Частоты, при которых происходит пересечение осей, определяются корнями уравнений
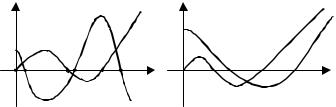
U (ω) = 0;
(6.50)
V (ω) = 0.
Точки |
пересечения кривых U(ω) и V(ω) с осью абсцисс дают значение корней уравнений (рис. |
6.25) для |
U(ω) = 0: ω1, ω3, ω5, …; для |
U,V |
|
|
|
U(ω) |
а) |
U,V |
|
|
|
V(ω) |
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V(ω) |
|
|
|
|
U(ω) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
ω |
ω |
ω |
ω |
ω |
|
|
ω |
ω4 |
|
|
0 |
1 |
2 |
3 |
4 |
5 |
ω0 |
ω2 |
1 |
|
ω3 |
|
|
|
|
|
|
ω |
|
|
ω |
Рис. 6.25 Действительная и мнимая составляющие функции Михайлова:
а – устойчивая система; б – неустойчивая система
V(ω) = 0: ω0, ω2, ω4,… В этом случае для устойчивой системы обязательно соблюдение неравенства ω0
<ω1 < ω2 < ω3 < ω4 < ...
Всвязи с этим можно привести следующую формулировку критерия устойчивости:
Система автоматического управления будет устойчива тогда и только тогда, когда вещественная U(ω) и мнимая V(ω) функции Михайлова, приравненные нулю, имеют все действительные и перемежающиеся корни, причем общее число этих корней равно порядку характеристического уравнения n,
ипри ω = 0 удовлетворяется условие U(0) > 0; V'(0) > 0.
6.8.3КРИТЕРИЙ НАЙКВИСТА
Этот частотный критерий, разработанный в 1932 г. американским ученым Найквистом, позволяет су-
дить об устойчивости замкнутой системы по виду АФХ разомкнутой системы.
Пусть передаточная функция разомкнутой системы имеет вид
|
b sm + b sm−1 |
+ ... + b |
|
|
B(s) |
, n ≥ m . |
||
W (s) = |
0 |
1 |
m |
= |
|
|||
|
sn + a sn−1 |
|
A(s) |
|||||
|
a |
0 |
+ ... + a |
n |
|
|
||
|
|
1 |
|
|
|
|
||
Передаточная функция замкнутой АСР по каналу управления:
W замк (s) = |
|
W (s) |
= |
|
B(s) / A(s) |
= |
B(s) |
. |
|
1 |
+W (s) |
|
|
1+ B(s) / A(s) |
|
A(s) + B(s) |
|
Характеристическое уравнение разомкнутой системы (n-го порядка) определено, как A(s) = 0 . Характеристическое уравнение замкнутой системы (n-го порядка) выражается, как A(s) + B(s) = 0. Рассмотрим, что представляет из себя выражение 1 + W(s):
1+W (s) =1+ |
B(s) |
= |
A(s) + B(s) |
= |
Dзамк(s) |
= H (s) , |
(6.51) |
|
A(s) |
A(s) |
Dразом(s) |
||||||
|
|
|
|
|

V |
где Dзамк(s), Dразом(s) |
– характеристические полиномы, соответственно, замк- |
|||||||||
|
нутой и разомкнутой АСР. Подставляя s = iω, получим |
|
|||||||||
ϕ(ω) |
U |
|
|
|
(iω)m +b (iω)m−1 |
|
|
|
|||
|
b |
|
|
+ ... +b |
|
|
|||||
M(ω) |
W (iω) = |
0 |
m = =U (ω) +iV (ω) = M (ω)eiϕ(ω) |
– |
|||||||
|
|
|
1 |
+ ... + a |
|||||||
|
|
a |
0 |
(iω)n + a (iω)n−1 |
n |
|
|||||
|
|
|
|
|
1 |
|
|
||||
|
Рис. 6.26 АФХ |
АФХ разомкнутой системы (рис. 6.26). |
|
|
||||||
|
разомкнутой |
Вектор (1+W (iω)), следовательно, включает в себя свойства замкнутой и |
||||||||
|
i0) |
системы |
разомкнутой системы, и по тому, как ведет себя W(iω) относительно |
|||||||
(–1, |
можно |
сделать |
вывод |
об |
устойчивости |
замкнутой |
системы. |
|||
В дальнейшем рассматривается АФХ, соответствующая положительным частотам. |
|
|||||||||
|
Выделим три случая состояния |
равновесия разомкнутой системы: устойчива, нейтральна и неус- |
||||||||
тойчива. |
|
|
|
|
|
|
|
|
|
|
|
1 с л у ч а й – система в разомкнутом состоянии устойчива. Тогда изменение аргумента характери- |
|||||||||
стического полинома разомкнутой системы согласно критерию устойчивости |
Михайлова будет равно |
|||||||||
(6.48): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
. |
|
|
||
|
|
|
|
∆ArgDразом(iω) |
ωω==0∞ = n |
|
|
|||
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Для того, чтобы замкнутая система была устойчива, должно выполняться равенство (6.48):
|
π |
. |
||
∆ArgD замк (iω) |
ωω==0∞ = n |
|||
2 |
||||
|
|
|
||
Отсюда следует, что приращение аргумента вектора H (iω) = (1+W (iω)) равно нулю:
∆ArgH(iω) ωω==∞0 = ∆ArgDзамк(iω) ωω==∞0 −∆ArgDразом(iω) ωω==∞0 = n π2 −n π2 = 0.(6.52)
Соотношение (6.52) означает, что для устойчивости замкнутой системы необходимо, чтобы вектор 1+W (iω) , начало которого находится в точке (–1, i0), а конец, скользя по АФХ разомкнутой системы, не
охватывал точку (–1, i0) при изменении ω от 0 до ∞ (рис. 6.27). Таким образом, критерий Найквиста гласит:
Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы не охватывает точку (–1, i0) при изменении ω от 0 до ∞.
|
Im |
|
а) |
Im |
|
б) |
–1 |
- |
|
ω = 0 |
|
|
ω = 0 |
(1) |
_ |
|
1 |
|||
|
|
Re |
|
Re |
||
|
|
W |
|
|||
|
|
|
W(iω) |
|
W(iω) + 1 = H(iω) |
|
W – (–1) = W + 1 |
|
|||||
Рис. 6.27 АФХ:
а – разомкнутой системы; б – функции H(i ω)
2 с л у ч а й – система в разомкнутом состоянии неустойчива.
При рассмотрении многоконтурных и одноконтурных систем регулирования, содержащих неустойчивые звенья, разомкнутая система может оказаться неустойчивой.
Пусть в разомкнутом состоянии система неустойчива, при этом характеристическое уравнение разомкнутой системы имеет m корней в правой полуплоскости. Тогда согласно принципу аргумента
(6.25):
∆ArgDразом(iω) ωω==∞0
= (n − 2m) π2.
Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно выполняться равенство (6.48):
∆ArgDзамк(iω) ωω==∞0 = n π2.
В этом случаеуголповорота вектора H(i ω) = 1+W (iω) будетравен
|
π |
|
π |
|
m |
|
(6.53) |
||
∆ArgH разом(iω) |
ωω==0∞ = n |
− (n − 2m) |
= |
2π. |
|||||
2 |
2 |
|
|||||||
|
|
|
2 |
|
|
||||
Последнее говорит о том, что АФХ функции H(i ω) при изменении частоты от 0 до ∞ охватывает начало координат в положительном направлении m2 раз.
Число оборотов вектора H(i ω) вокруг начала координат равно числу оборотов вектора АФХ разомкнутой системы W(i ω) вокруг точки (–1, i0). На основании этого вытекает следующая формулировка критерия Найквиста.
Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая система автоматического управления была устойчива, необходимо и достаточно, чтобы АФХ разомкнутой системы W(iω) при изменении частоты от 0 до ∞ охватывала точку (–1, i0) в положитель-
ном направлении m2 раз, где m – число правых корней характеристического уравнения разомкнутой системы.
Im |
|
а) |
Im |
m = 2 б) |
m = 2 |
||||
|
1 |
ω = 0 |
ω= ∞ |
ω = 0 |
|
Re |
–1 |
Re |
|
|
|
H(iω) |
|
W(iω) |
Рис. 6.28 АФХ: а – H(i ω); б – W(i ω) при m = 2 |
||||
На рис. 6.28 изображены в качестве примера АФХ H(i ω) и АФХ разомкнутой системы, соответствующие устойчивой замкнутой системе, которая в разомкнутом состоянии неустойчива и m = 2.
При сложной форме W(i ω) могут возникнуть затруднения при определении числа ее оборотов вокруг точки (–1, i0). В этом случае удобно применять "правило переходов", предложенное Я. З. Цыпкиным
Назовем переход W(iω) через вещественную ось при возрастании ω положительным, если он происходит сверху вниз, и отрицательным, если он происходит снизу вверх. Если W(iω) начинается или заканчивается на оси, то она совершает полперехода. Тогда критерий Найквиста можно сформулировать следующим образом.
Еслиразомкнутая система автоматического управления неустойчива, то длятогочтобы замкнутая система автоматическогоуправлениябылаустойчива, необходимоидостаточно, чтобыразностьмеждучисломположительныхиотрицательныхпереходовАФХразомкнутойсистемыW(iω) черезотрезоквещественнойоси(–∞, –1)
приизменениичастотыот0 до∞ быларавна m2 , гдеm – числоправыхкорнейхарактеристическогоуравнения.
В качестве примера на рис. 6.29 изображена АФХ разомкнутой системы: число правых корней m = |
||||||||||
|
|
Im |
|
|
2; число переходов – два положительных, один отрицательный, их |
|||||
|
|
|
|
|
разность |
|
|
|
равна |
|
|
|
|
|
|
1 = m |
, следовательно, замкнутая система устойчива. |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
+ |
– + |
|
|
|
3 с л у ч а й – система в разомкнутом состоянии нейтральна. |
|
||||
-1 |
0 |
Re |
В этом случае система должна содержать интегрирующие звенья, и |
|||||||
|
|
|
|
|
тогда |
характеристическое уравнение разомкнутой |
системы |
имеет |
||
|
|
|
|
|
корни, равные нулю, и записывается в виде |
|
|
|
(6.54) |
|
|
Рис. 6.29 |
АФХ ра- |
|
A(s) = sν A1(s) = 0, |
|
|||||
|
где ν – порядок астатизма; А1(s) – полином, не имеющий корней, рав- |
|||||||||
|
зомкнутой системы |
ных нулю. |
|
|
|
|
||||
|
|
при m = 2 |
|
Амплитудно-фазовая характеристика разомкнутой системы записы- |
||||||
вается в виде |
|
|
|
|||||||
|
|
|
|
|
|
B(i ω) |
|
|
||
|
|
|
|
|
|
W (i ω)= |
|
. |
(6.55) |
|
|
|
|
|
|
|
|
(i ω)v A (i ω) |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
При ω = 0, W(iω) = ∞ и АФХ претерпевает разрыв, поэтому решать вопрос об устойчивости |
||||||||||
замкнутой системы трудно, так как неясно, охватывает АФХ точку (–1, i0) или нет. |
|
|
|
|||||||
Чтобы сохранить формулировку критерия для устойчивых в разомкнутом состоянии систем, при построении годографа Михайлова при изменении частоты от –∞ до +∞ обходят начало координат по полуокружности бесконечно малого радиуса r. Тогда нулевые корни дадут такой же угол поворота, как левые корни, т.е. каждый из векторов повернется на угол π (рис. 6.30).
Обходу начала координат по малой дуге reiφ соответствует передаточная функция разомкнутой системы
W (s) = |
B(s) |
|
S =0 = |
B(0) |
|
1 |
= R e−iψ. |
|
(6.56) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||||||
sν A (s) |
A (0) |
(reiϕ)ν |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При r → 0 радиус R → ∞, а аргумент ψ меняется от |
ν |
|
π |
до |
−ν |
π |
при изменении φ от |
π |
до |
− |
π |
. |
||||||||
2 |
2 |
2 |
2 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Таким образом, при движении по полуокружности бесконечно малого радиуса в плоскости корней АФХ разомкнутой системы сама W(iω) может быть представлена в виде вектора бесконечно большой длины, поворачивающегося на комплексной плоскости по часовой стрелке на угол, равный –νπ.
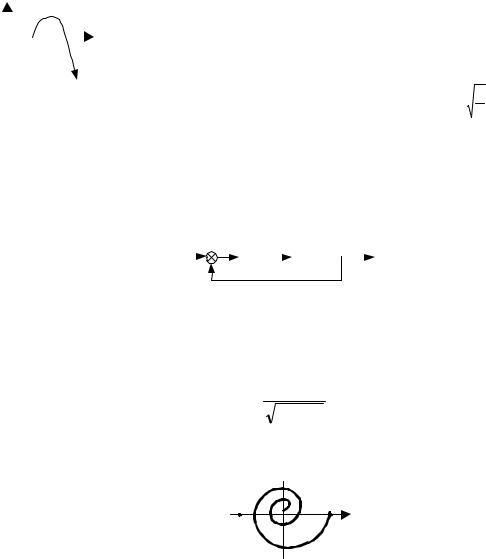
При изменении ω от 0 до ∞, т.е. r → 0, 0 ≤ φ ≤ π2 , W(iω) изменяется по дуге бесконечно большого ра-
диуса, описывая угол от 0 до −ν |
π |
(рис. 6.31). Критерий Найквиста формулируется следующим обра- |
|
2 |
|||
|
|
зом.
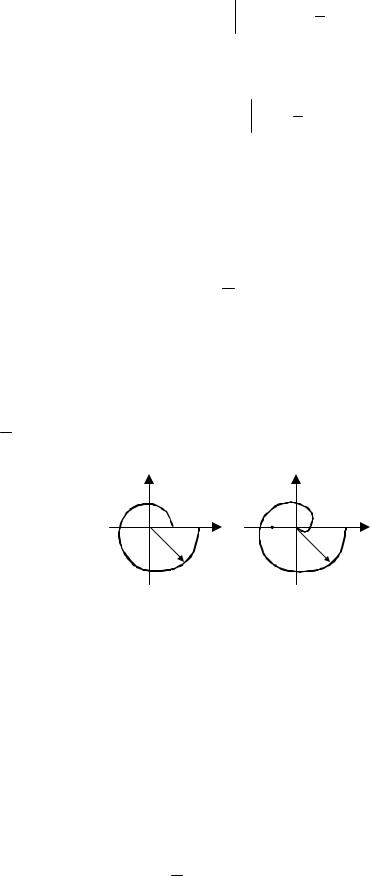
Система автоматического регулирования, нейтральная в разомкнутом состоянии, устойчива в замкнутом состоянии, если АФХ разомкнутой системы с его дополнением в бесконечности не охватывает точку (–1, i0) при изменении ω от 0 до ∞.
Im |
|
а) |
Im |
|
|
б) |
|
|
|
||||||
ω→∞ |
|
R = ∞ |
|
W(iω) |
|
|
R →∞ |
|
|
|
|
||||
|
|
–1 ω |
|
→∞ |
|||
–1 |
|
Re |
|
Re |
|||
W(iω) |
|
ν = 1 |
|
|
|
|
|
|
|
|
|
|
ν = 2 |
|
|
|
|
|
|
|
|
|
|
ω= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.31 АФХ нейтральной разомкнутой системы:
а – с астатизмом первого порядка, ν = 1; б – с астатизмом второго порядка, ν = 2
Как видно из рис. 6.31, если разомкнутая система имеет астатизм первого порядка, то замкнутая сис-
тема устойчива, так как точка (–1, i0) не охватывается, если же астатизм будет второго порядка, то
замкнутая система неустойчива – точка (–1, i0) охватывается АФХ разомкнутой системы.
Достоинствами критерия Найквиста являются:
1)применимость при неизвестных уравнениях некоторых звеньев разомкнутой системы;
2)возможность исследования устойчивости систем с запаздыванием.
Пример 6.3 |
Исследовать устойчивость системы критерием Михайлова, |
если характеристиче- |
|||||||||||||||
ское уравнение системы имеет вид |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
D(s) = 2s4 + 4s3 + 2s2 + 5s + 1 = 0. |
|
||||||||||
Заменяя s = iω, находятся действительная и мнимая функции Михайлова: |
|
||||||||||||||||
откуда |
|
|
|
|
|
D(iω) = 2(iω)4 + 4(iω)3 + 2(iω)2 + 5(iω) + 1, |
|
||||||||||
|
|
|
|
|
|
|
|
U(ω) = 2ω4 – 2ω2 + 1; |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
V(ω) = ω(–4ω2 + 5). |
|
|
|
|||||
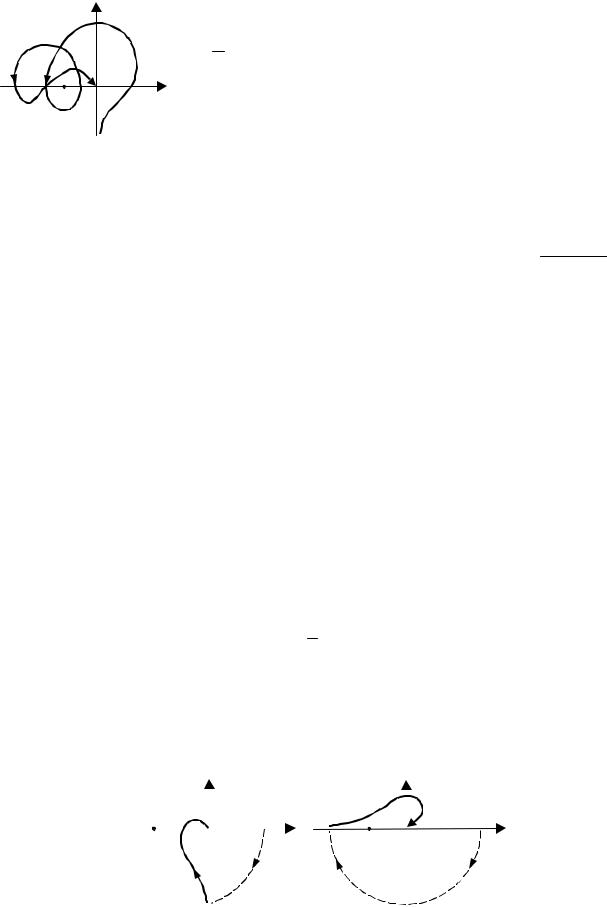
|
V(ω) |
|
|
|
Годограф Михайлова изображен на рис. 6.32. Его анализ показывает, |
||||||||||||
|
|
|
|
что система неустойчива. Если использовать следствие, то U(ω) = 0; V(ω) |
|||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
U(ω) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
Решение этих уравнений дает: |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ω21,3 = 1 ± i; ω0 = 0; ω2,4 = ± |
52 . |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 6.32 |
Годограф |
Так как имеются комплексно-сопря-женные корни, то система неус- |
|||||||||||||||
тойчива. |
|
|
|
|
|
|
|
|
|
||||||||
Пример 6.4 |
Исследовать устойчивость системы автоматического регулирования (рис. 6.33), если |
||||||||||||||||
W1(s) = |
1 |
; W2(s) = е-2s. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2s +1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
y(t) |
|
|||
|
|
|
|
|
|
|
W1(s) |
|
|
W2(s) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.33 Структурная схема АCР
В разомкнутом состоянии система автоматического регулирования устойчива. Амплитуднофазовая характеристика разомкнутой системы записывается:
W разом (iω) = |
1 |
ei(−2 |
ω−arctg 2 |
ω) |
|
1+ 4ω2 |
|||||
|
|
|
|
и изображена на рис. 6.34.
Im
–1 1
Re
Рис. 6.34 АФХ разомкнутой системы к примеру 6.4


|
Im |
|
а) |
Im |
|
|
б) |
|
|
|
|||||
A |
|
M0 M0 M0 |
|
A1 A3 |
|
|
|
–1 |
k < kпр |
Re |
A2 |
|
Re |
||
|
k = kпр |
|
|
|
|
|
|
|
k > kпр |
|
|
|
|
|
|
Рис. 6.37 АФХ статической системы третьего порядка:
а– для различных коэффициентов усиления;
б– вычерчивание обратных изменений единицы масштаба
Все эти характеристики могут быть получены из "первоначальной" путем изменения масштаба, причем удобнее не вычерчивать характеристику с новым масштабом, а изменять масштаб обратным изменением единицы масштаба. В этом случае достаточно вычерчивать одну АФХ раз и навсегда и уменьшать размер отрезка OА, равного единице, во столько же раз, во сколько увеличивается коэффициент усиления. При этом точка А будет перемещаться вправо (рис. 6.37, б). При малом значении коэффициента усиления k системы масштаб единицы ОА велик, и точка А находится в положении А1. В этом случае АФХ разомкнутой системы не охватывает точку А1, и, следовательно, замкнутая система устойчива. При увеличении коэффициента усиления k масштаб единицы уменьшается, критическая точка движется направо и при k = kпр занимает положение A2, система находится на границе устойчивости.
При k > kпр критическая точка продолжает перемещаться направо, занимает положение А3, и система становится неустойчивой.
Влияние коэффициента усиления на устойчивость, используя критерий Найквиста, можно проследить и для систем высокого порядка, в частности, с "клювообразными" характеристиками (рис. 6.38, а). В этом случае при малом значении коэффициента усиления критическая точка находится в положении А1, и замкнутая система устойчива. Увеличение коэффициента усиления передвигает точку в положение А2, k = kпp1, и система выходит на границу устойчивости. Дальнейшее увеличение коэффициента усиления приводит систему к неустойчивости, так как критическая точка занимает положение А3 и охватывается АФХ. Положение А4, в котором k = kпp2, является границей устойчивости, а положение А5 критической точки устойчиво, так как не охватывается АФХ. Таким образом, можно сделать следующий вывод.
Система устойчива при малых значениях коэффициента усиления k < kпр1 и при достаточно больших k > kпр2, имеет две границы устойчивости при k = kпр1 и k = kпр2, неустойчива при kпр1 < k < kпр2.
Анализ амплитудно-фазовой характеристики разомкнутой системы, изображенной на рис. 6.38, б, показывает, что система имеет три предельных значения коэффициента усиления k1пр, k2пр , k3пр, соответствующие точкам А2, А4, А6 и границе устойчивости. При значениях коэффициента усиления k < kпр1, kпр2 < k < kпр3 система устойчива (точки А1, А5), а при значениях kпр1 < k < kпр2, k > kпр3 система неустойчива (точ-
ка А3, А7).
|
|
Im |
а) |
|
|
Im |
|
б) |
|
A2 |
A4 |
|
A2 |
|
A4 |
0 |
|
A1 |
A3 |
A5 0 |
Re |
A1 |
A3 |
A5 A6 A7 |
Re |
Рис. 6.38 АФХ системы высокого порядка:
а – "клювообразная" АФХ первого порядка; б – "клювообразная" АФХ второго порядка

|
Im |
|
а) |
|
Im |
б) |
–1 |
0 |
W1 |
Re |
–1 |
0 W |
Re |
|
|
W2 |
|
1 |
||
|
|
|
|
W2 |
|
|
|
|
W3 |
|
|
|
|
|
|
|
|
W3 |
|
|
|
|
|
|
|
|
Рис. 6.39 АФХ простых систем:
а – АФХ систем первого порядка; б – АФХ систем второго порядка Применение критерия Найквиста к исследованию более простых систем − систем первого и второго
порядка показывает, что если разомкнутая система является системой первого порядка без запазды-
вания, то как бы ни изменялись параметры системы, АФХ разомкнутой системы всегда будет распо-
лагаться в четвертом квадранте (рис. 6.39, а) и, следовательно, замкнутая система всегда будет ус-
тойчивой.
Для разомкнутых систем второго порядка АФХ располагается в нижней полуплоскости и, следовательно, как бы ни изменялись ее параметры, АФХ никогда не охватывает точку (–1, i0), и исследуемая замкнутая система всегда будет устойчивой.
Также с помощью критериев устойчивости Михайлова и Найквиста могут быть решены вопросы ста-
билизации системы. В частности, одним из способов стабилизации является введение гибкой отрица-
тельнойсвязи.
6.8.5 АНАЛИЗ УСТОЙЧИВОСТИ ПО ЛОГАРИФМИЧЕСКИМ ЧАСТОТНЫМ ХАРАКТЕРИСТИКАМ
В инженерной практике иногда анализ устойчивости проводят по логарифмическим частотным характеристикам, построение которых проще, чем амплитудно-фазовой характеристики. Если проследить зависимость между поведением АФХ разомкнутой системы и логарифмической амплитудно-частотной и логарифмической фазочастотной характеристиками, то можно сформулировать критерий Найквиста применительно к логарифмическим частотным характеристикам.
Для того, чтобы система автоматического управления была устойчивой, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов логарифмической фазочастот-
|
|
Im |
|
а) |
ln A |
|
ln A > 0 |
ln A < 0 б) |
|
|
|
|
|
|
|
|
Wc |
|
–1 |
|
|
|
ϕ |
|
|
ln ω |
|
|
|
|
|
|
|
||
1 |
2 |
3 |
0 |
Re |
|
|
|
ln ω |
|
|
Wc |
|
|
|
|
|
|
|
|
|
|
|
–π |
– |
+ |
3 |
|
|
|
|
|
1 |
|
2 |
Рис. 6.40 Частотные характеристики:
а – АФХ; б – логарифмические частотные характеристики

ной характеристикой прямых ±π(2j + 1), где j = 0, 1, 2, ... во всех областях, где логарифмическая ампли- тудно-частотная характеристика положительна, была равна m2 , где m – число правых корней характе-
ристического уравнения разомкнутой системы.
На рис. 6.40 приведены АФХ разомкнутой системы и соответствующие ей ЛАЧХ и ЛФЧХ. Анализ частотных характеристик показывает, что разность между числом положительных и отри-
цательных переходов равна нулю, то есть замкнутая система будет устойчива только в том случае, если правые корни будут отсутствовать, т.е. разомкнутая система должна быть устойчивой.
6.9 Д-разбиение
В п. 6.7 было рассмотрено построение областей устойчивости с использованием критерия Гурвица
и в качестве примера построена гипербола Вышнеградского. На практике используются другие бо-
лее общие методы исследования влияния различных параметров системы – на ее устойчивость, т.е.
разработаны следующие специальные методы построения областей устойчивости:
1) путем анализа перемещения корней характеристического уравнения в плоскости корней – метод корневого годографа;
2) путем анализа числа корней характеристического уравнения, лежащих в правой полуплоскости, в
пространстве параметров системы – метод Д-разбивания пространства параметров, который был
предложен и разработан в 1948 г. Неймарком.
6.9.1 ПОНЯТИЕ Д-РАЗБИЕНИЯ |
|
|
Рассмотрим характеристическое уравнение замкнутой системы |
n-го порядка, которое всегда |
|
может быть приведено к виду: |
|
|
D(s) = sn + a1 sn–1 + ... + an = 0 (a0 = 1). |
(6.57) |
|
Представим себе координатное пространство, осями которого являются коэффициенты уравнения, оно получило название пространство коэффициентов. Каждой точке этого пространства соответствуют конкретные численные значения коэффициентов уравнения и соответствующий им полином n-й степени, который имеет n корней, зависящих от численных значений коэффициентов аi. Если изменять эти коэффициенты, то корни будут перемещаться в комплексной плоскости корней этого уравнения
Рассмотрим уравнение третьего порядка
D(s) = s3 + a1 s2 + а2 s + a3 = 0 |
(6.58) |
|
|
i ω |
а) |
a2 |
M a2M б) |
s2N |
|
|
|
s2M |
|
|
S |
|
|
|
|
s1N |
s1M |
N |
a1N a1M |
|
α |
a2N |
|
|
a3M |
a1 |
|
s3M |
|
||
|
|
||
s3N |
|
a3N |
|
|
|
|
|
a3 
Рис. 6.41 Связь корней характеристического уравнения и пространства коэффициентов: