

1. Упос как составная часть системы передачи информации. Предмет и задачи курса.
Информация передается с помощью сообщений. Наиболее быстрый способ передачи сообщений с помощью сигналов. Можно выделить первичный и вторичный сигналы.
При
распространении сигналов в некоторой
среде возникает их искажения, к ним
добавляются помехи, поэтому при извлечении
информации происходят ее потери. Если
передачи информации осуществить с
помощью аналоговых сигналов, то потери
характеризуются отношением
![]() на выходе передающего устройства. При
цифровых сигналах потери характеризуются
вероятностью ошибки.
на выходе передающего устройства. При
цифровых сигналах потери характеризуются
вероятностью ошибки.
Успехи вычислительной техники обусловлены развитием цифровых систем связи, которые являются перспективными. Основные достоинства:
малые потери информации – высокое качество передачи.
представление информации в цифровом виде позволяет легко автоматизировать процессы обработки информации.
Стоимость систем передачи информации определяется: скоростью передачи информации, допустимым уровнем потерь информации, чем выше уровень помех, тем больше степень искажения.
Из всех систем передачи информации наиболее сложные радиотехнические. Высокая стоимость систем обусловлена: доступностью среды распространения сигнала многим источникам излучения; среда распространения радиосигнала является не искусственной средой, а следовательно искажения велики.
Так как радиотехнические системы обеспечивают высокую дальность и мобильность, они являются привлекательными для многих служб, предъявляемых высокие требования.
С
АЦП АФУ БУ
Источник инфор-ции Кодер Моду- лятор Усилитель мощности
Среда распространения










Передатчик


Получатель инфор-ции ЦАП Декодер Демод. (Нелин.тр) Усил+Ф. (Лин.тр)
АФУ







Искаж Помехи БУ

 Приемник
Приемник
Аналоговый сигнал поступает на АЦП. Поток данных с выхода АЦП поступает в кодер, где сжимается, защищается от помех, засекречивается. В модуляторе осуществляется перенос первичного радиочастотного сигнала на транспорт – высокочастотную несущую.
Усилитель мощности обеспечивает дальность передачи.
В усилитель+фильтр сигнал усиливается и очищается от помех с помощью линейного тракта.
Демодулятор извлекает из вторичного сигнала первичный. Далее сигнал декодируется и через ЦАП в виде аналогового сигнала поступает в телефон.
Блоки управления в приемнике и передатчике обеспечивают автоматику управления, диагностики и интерфейс пользователя.
Так как связь двусторонняя, то близкие по принципу построения модулятор и демодулятор объединяют в модем, а кодер и декодер в кодек.
2. Использование теории оптимального приема при проектировании упос. Основные задачи приема. Структура оптимального приемника.
Характеристики линейного и нелинейного трактов приемника во многом определяет качество передачи информации, а следовательно стоимость всей СПИ.
С целью оптимизации характеристик разработана теория оптимального приема, которая отдельно рассматривает линейные и нелинейные устройства.
Однако структуры устройств, которые получаются при использовании этой теории, оказываются сложными и дорогими. Поэтому на практике используется субоптимальный прием, который оказывается намного дешевле (но немного хуже). Поэтому результаты позволяют выбрать лишь ориентир для практического проектирования и позволяют отследить качество спроектированного приемника в сравнении с оптимальным.
Рассмотрим оптимальную характеристику фильтра линейного тракта, которая обеспечивает минимальный уровень среднеквадратичной ошибки выходного сигнала такта по сравнению с неискаженным идеальным сигналом.
Частотная
характеристика:
![]() ,
,![]() - задержка,
- задержка,![]() - энергетические спектры сигнал, помеха.
- энергетические спектры сигнал, помеха.
















![]()


![]()


![]()
![]()
![]() энергетические
спектры
энергетические
спектры








![]()
![]()
1
 АЧХ
АЧХ
![]()
Из графических построений следует, что оптимальный фильтр в полосе частот должен иметь единичный коэффициент передачи, а вне полосы частот нулевой. Скаты АЧХ фильтра определяются соотношением скатов спектров внеполосных помех и сигнала.
Наиболее просто требуемая форма фильтра апроксимируется полосовым фильтром.
Синтез оптимального демодулятора.
Так как на вход приемника поступает сумма внеполосных и внутриполосных помех, причем внутриполосные помехи часто обусловлены собственным электрическим шумом линейного тракта.
Извлечение первичного сигнала из вторичного осуществляется демодулятором в присутствии внутриполосных помех.
Если внутриполосная помеха обусловлена лишь электрическим шумом линейного тракта, то она представляет из себя белый Гауссов шум (плотность вероятности значений шума подчиняется гаусовому закону, а энергитический спектр характеризуется постоянной спектральной плотностью мощности во всем диапазоне частот сигнала).






![]()
![]()
Собственному электрическому шуму линейного тракта добавляется шум от внешних источников излучения.
Теория оптимального приема позволяет синтезировать схему оптимального демодулятора, если известен закон модуляции сигнала и характеристики помех.
Оптимальный демодулятор в заданных условиях обеспечивает наименьшие потери информации.
Схема оптимального демодулятора определяется также математической формулировкой задачи приема.
1 Формулировка: обнаружение сигнала – демодулятор должен отвечать на вопрос, присутствует или отсутствует на входе приемника сигнал заданной формы.
Эта задача решается путем согласованных фильтров, которые обеспечивают максимальное отношение мощности сигнала к мощности помехи в некоторый момент времени, при этом форма сигнала на выходе демодулятора может отличаться от формы сигнала на входе демодулятора.
2 Формулировка: Различение сигнала – демодулятор должен отвечать на вопрос, какой из сигналов присутствует на его входе. Ансамбль сигналов заранее известен.
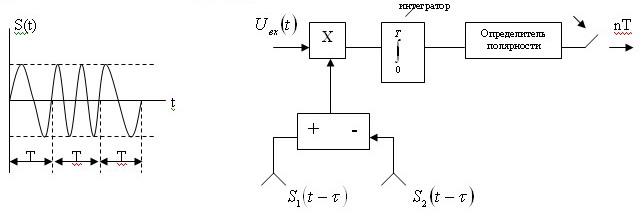
Рассмотрим структуру оптимального демодулятора, осуществляющего прием двоичных сигналов на фоне белого гаусового шума. Считаем, что сигналы одинаковой длительности, энергии и ортогональны относительно друг друга.





![]()
 интегратор.
интегратор.
Т
В этом случае на выходе перемножителя присутствует сумма положительной постоянной составляющей и совокупность высокочастотных и шумовых компонентов.
На выходе интегратора формируется сумма линейно возрастающего положительного напряжения совокупности высокочастотных компонентов. В момент времени Т отношение линейно возрастающего напряжения к высокочастотной компоненте является наибольшим. Следовательно, определитель полярности в этот момент времени произойдет с наименьшей вероятностью ошибки.
Р


 ассмотрим
ситуацию, когда на вход приходит
возрастающий ослабленный сигнал
ассмотрим
ситуацию, когда на вход приходит
возрастающий ослабленный сигнал![]() и
белый гауссов шум.
и
белый гауссов шум.
![]()
Т
На выходе перемножителя формируется сумма отрицательной постоянной составляющей и совокупность высокочастотных и случайных компонентов.
На выходе интегратора формируются “загрязненные” линейно возрастающие отрицательные напряжения.
На
практике величина задержки
![]() неизвестна, а следовательно неизвестен
фазовый сдвиг сигнала, пришедший на
вход перемножителя.
неизвестна, а следовательно неизвестен
фазовый сдвиг сигнала, пришедший на
вход перемножителя.
Чтобы определить фазу принимаемого сигнала данную структуру надо дополнить сложной системой ФАПЧ. Так как определение фазы происходит с некоторой погрешностью, то вероятность ошибки на выходе демодулятора выше чем у оптимального демодулятора, поэтому схемы демодулятора являются субоптимальными схемами.
Степень отклонения от оптимальности определяется уровнем разработки.
Таким образом, использование теории оптимального приема для проектирования демодулятора позволяет получить ориентир для проектирования и оценить потенциально достижимый приема. То есть вероятность ошибки реального демодулятора не может быть меньше вероятности ошибки оптимального демодулятора.
3 Формулировка: Фильтрация сообщений.
Применяется для аналоговых первичных сигналов. Оптимальный демодулятор должен обеспечить выходного сигнала от неискаженного первичного сигнала. Обычно задача решается с использованием систем ФАПЧ.