

1.5.3. Алгоритм постобработки для границ второго типа
Если граница
![]() между блоками
между блоками![]() и
и![]() принадлежит к типу 2, то это означает,
что ни один из двух блоков, составляющих
данную границу, не является краевым. В
этом случае можно заменить в смещенном
блоке
принадлежит к типу 2, то это означает,
что ни один из двух блоков, составляющих
данную границу, не является краевым. В
этом случае можно заменить в смещенном
блоке![]() ступенчатую двумерную функцию
ступенчатую двумерную функцию![]() ,
используемую для построения модели
смещенного блока, на линейную двумерную
функцию. На рис. 6 показан одномерный
случай замены ступенчатой функции
,
используемую для построения модели
смещенного блока, на линейную двумерную
функцию. На рис. 6 показан одномерный
случай замены ступенчатой функции![]() на линейную функцию
на линейную функцию![]() .
.
|
|
|
Рис. 6. Иллюстрация замены ступенчатой функции на линейную функцию |
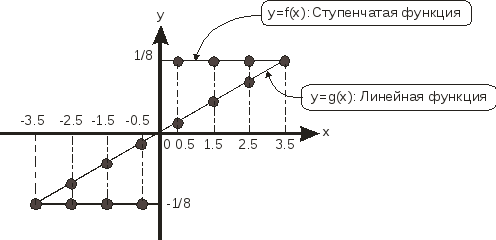
Используя параметры рис. 6, находим, что
![]() .
.
Таким образом, можно получить восемь значений пикселей линейной функции [5]:
![]() (27)
(27)
Линейная двумерная
функция
![]() может быть составлена из восьми строк,
каждая из которых – это вектор
может быть составлена из восьми строк,
каждая из которых – это вектор![]() .
.
 (28)
(28)
Отметим, что матрица
![]() является асимметричной в горизонтальном
направлении и постоянной в вертикальном
направлении. Поэтому ДКП линейной
двумерной функции
является асимметричной в горизонтальном
направлении и постоянной в вертикальном
направлении. Поэтому ДКП линейной
двумерной функции![]() ,
как и ДКП ступенчатой двумерной функции
,
как и ДКП ступенчатой двумерной функции![]() ,
имеет лишь четыре ненулевых элемента
в первой строке. Пусть вектор
,
имеет лишь четыре ненулевых элемента
в первой строке. Пусть вектор![]() – это первая строка матрицы коэффициентов
ДКП линейной двумерной функции
– это первая строка матрицы коэффициентов
ДКП линейной двумерной функции![]() .
Тогда из свойства асимметрии
.
Тогда из свойства асимметрии![]() в горизонтальном направлении следует,
что
в горизонтальном направлении следует,
что![]() .
.
Пусть вектор
![]() ,
где
,
где![]() – первая строка матрицы коэффициентов
ДКП ступенчатой двумерной функции
– первая строка матрицы коэффициентов
ДКП ступенчатой двумерной функции![]() .
Пусть блок
.
Пусть блок![]() – обновленный блок после замены в блоке
– обновленный блок после замены в блоке![]() ступенчатой двумерной функции
ступенчатой двумерной функции![]() на линейную двумерную функцию
на линейную двумерную функцию![]() ,
тогда:
,
тогда:
![]() (29)
(29)
где
![]() определяется из выражения (15). ДКП как
определяется из выражения (15). ДКП как![]() ,
так и
,
так и![]() имеют только четыре ненулевых элемента
в своих первых строках, которые
представлены векторами
имеют только четыре ненулевых элемента
в своих первых строках, которые
представлены векторами![]() и
и![]() соответственно. Применение формулы
(29) в пространстве ДКП выглядит следующим
образом:
соответственно. Применение формулы
(29) в пространстве ДКП выглядит следующим
образом:
![]()
![]() (30)
(30)
где
![]() – это матрица коэффициентов ДКП для
блока
– это матрица коэффициентов ДКП для
блока![]() .
.
Блок
![]() затем используется для преобразования
обоих блоков
затем используется для преобразования
обоих блоков![]() и
и![]() (рис. 2.2)
посредством перемножения матриц,
похожего на преобразование (11). Но в
связи с тем, что только элементы первой
строки матрицы
(рис. 2.2)
посредством перемножения матриц,
похожего на преобразование (11). Но в
связи с тем, что только элементы первой
строки матрицы
![]() изменяются для получения матрицы
изменяются для получения матрицы![]() ,
в матрицах
,
в матрицах![]() и
и![]() подвергнутся изменению также только
элементы первой строки, что видно из
формулы (11). Поэтому можно использовать
следующий простой алгоритм преобразования
блоков
подвергнутся изменению также только
элементы первой строки, что видно из
формулы (11). Поэтому можно использовать
следующий простой алгоритм преобразования
блоков![]() и
и![]() .
Пусть
.
Пусть![]() и
и![]() – это дельта вектора для матриц
– это дельта вектора для матриц![]() и
и![]() соответственно. Тогда
соответственно. Тогда
![]()
где
![]() и
и![]() – матрицы из (11). Окончательно блоки
– матрицы из (11). Окончательно блоки![]() и
и![]() преобразуются по следующему алгоритму:
преобразуются по следующему алгоритму:
![]() (31)
(31)
Отметим, что
![]() и
и![]() – это постоянные вектора, которые могут
быть вычислены заранее и сохранены.
– это постоянные вектора, которые могут
быть вычислены заранее и сохранены.
1.5.4. Алгоритм постфильтрации в пространстве дкп границ второго и третьего типа
После применения
к блокам
![]() и
и![]() преобразования (31) новые артефакты, хотя
и менее заметные, могут возникать на
границе между блоками
преобразования (31) новые артефакты, хотя
и менее заметные, могут возникать на
границе между блоками![]() и
и![]() .
Чтобы подавить вновь созданные искажения,
к обоим измененным блокам
.
Чтобы подавить вновь созданные искажения,
к обоим измененным блокам![]() и
и![]() применяется метод постфильтрации в
пространстве ДКП. Этот же метод применяется
и для границ третьего типа с целью
уменьшения артефактов блочности [5].
применяется метод постфильтрации в
пространстве ДКП. Этот же метод применяется
и для границ третьего типа с целью
уменьшения артефактов блочности [5].
Пусть
![]() – это блок 8 × 8m-той
строки и n-того
столбца изображения, а блок
– это блок 8 × 8m-той
строки и n-того
столбца изображения, а блок
![]() – это блок, сдвинутый относительно
блока
– это блок, сдвинутый относительно
блока![]() на
на![]() пикселей по оси
пикселей по оси![]() и на
и на![]() пикселей по оси
пикселей по оси![]() ,
как показано на рис. 4.4.
,
как показано на рис. 4.4.
|
|
|
Рис. 7. Иллюстрация
смещенного блока при
|

Из рис. 7
видно, что при
![]() и
и![]() блоки
блоки![]() и
и![]() будут частично перекрываться. Пусть
будут частично перекрываться. Пусть![]() и
и![]() – матрицы коэффициентов ДКП блоков
– матрицы коэффициентов ДКП блоков![]() и
и![]() соответственно. Тогда постфильтрация
в пространстве ДКП для преобразования
соответственно. Тогда постфильтрация
в пространстве ДКП для преобразования![]() выглядит следующим образом:
выглядит следующим образом:
![]() (32)
(32)
где
![]() – это отфильтрованный блок в пространстве
ДКП,
– это отфильтрованный блок в пространстве
ДКП,![]() – максимальное смещение по осям
– максимальное смещение по осям![]() и
и![]() ,
,![]() – весовые коэффициенты блоков
– весовые коэффициенты блоков![]() ,
а
,
а![]() – это сумма всех весовых коэффициентов,
определяемая по формуле:
– это сумма всех весовых коэффициентов,
определяемая по формуле:
![]() (33)
(33)
Блоки в пространстве
ДКП
![]() могут быть найдены непосредственно из
четырех соседних блоков, с которыми они
перекрываются [29] по формуле:
могут быть найдены непосредственно из
четырех соседних блоков, с которыми они
перекрываются [29] по формуле:
![]() (34)
(34)
где
![]() и
и![]() – это матрицы коэффициентов ДКП от
матриц
– это матрицы коэффициентов ДКП от
матриц![]() и
и![]() соответственно. Матрицы
соответственно. Матрицы![]() и
и![]() определены в [30]. Непосредственное
применение формулы (34) приводит к большому
увеличению вычислительной сложности
алгоритма постобработки. Разработано
несколько быстрых алгоритмов [31, 32-33],
которые уменьшают вычислительную
сложность (34).
определены в [30]. Непосредственное
применение формулы (34) приводит к большому
увеличению вычислительной сложности
алгоритма постобработки. Разработано
несколько быстрых алгоритмов [31, 32-33],
которые уменьшают вычислительную
сложность (34).