

5.2.3. Continuous – аналоговые (непрерывные) блоки
Библиотека аналоговых блоков показана на рис 5.19.
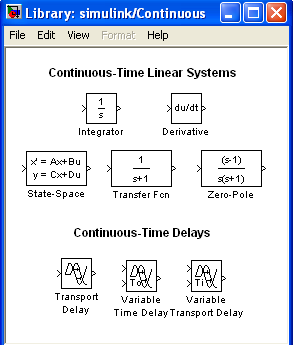
Рис. 5.19. Библиотека непрерывных блоков
Все блоки в библиотеке разделяются на две группы. В первую группу включены динамические блоки, предназначенные для анализа и синтеза непрерывных систем. Эти блоки представляют собой символьную запись дифференциальных уравнений, которыми описываются непрерывные линейные системы управления. Во вторую группу включены блоки временных задержек сигнала.
Эти блоки, кроме своих основных функций, позволяют существенно уменьшить время моделирования в системах с отрицательной обратной связью. Для этого данный блок нужно включить в цепь обратной связи. При этом время задержки следует выбрать таким, чтобы наличие блока не влияло на динамические процессы в системе.
Integrator – интегрирующий блок.
Выполняет интегрирование входного сигнала с возможностью внешнего сброса на нарастающий сигнал (rising), на спадающий сигнал (falling), на нарастающий либо спадающий сигнал (either), на не нулевой сигнал (level). Блок позволяет задать начальное условие (Initial condition) и ввести ограничение выходного сигнала (Upper saturation limit. Lower saturation limit).
Derivative – блок вычисления производной. Выполняет численное дифференцирование входного сигнала.
Данный блок используется для дифференцирования аналоговых сигналов.
State-Space – блок создает динамический объект, описываемый уравнениями в пространстве состояний:
х = Ах + Ви
у = Сх + Du,
где х – вектор состояния, u – вектор входных воздействий, у – вектор выходных сигналов, А, В, С, D – матрицы: системы, входа, выхода и обхода, соответственно.
Блок позволяет задать вектор начальных условий для переменных состояния(Initial condition).
На рис. 5.20 показан пример моделирования динамического объекта с помощью данного блока (файл State-Space).

Рис. 5.20. Пример использования блока State-Space
Задание. Сделать 2…3 модели с использованием блока State-Space
Transfer Fcn — блок передаточной функции задает передаточную функцию в виде отношения полиномов:
![]()
При этом порядок числителя не должен превышать порядок знаменателя. В окне настройки параметров блока задаются вектор коэффициентов полинома числителя (Numerator) и вектор коэффициентов полинома знаменателя (Denominator). На рис. 5.21 показан пример моделирования колебательного звена с помощью блока Transfer Fun (файл Trans. Fun).

Рис. 5.21. Пример использования блока Transfer Fun
Если коэффициенты числителя заданы матрицей, то блок Transfer Fun мо, моделирует векторную передаточную функцию, которую можно интерпретировать как несколько передаточных функций, имеющих одинаковые полиномы знаменателя, но разные полиномы числителя. При этом выходной сигнал блока является векторным и количество строк матрицы числителя задает размерность выходного сигнала.
Задание. Сделать 2…3 модели с использованием блока Transfer Fun
Zero-Pole – определяет передаточную функцию с заданными полюсами и нулями:
![]()
где z1, z2, zm – нули передаточной функции (корни полинома числителя),
p1,p2, pn – полюсы передаточной функции (корни полинома знаменателя), K – коэффициент передаточной функции. В окне настройки параметров блока задаются – вектор нулей (Zeros), вектор полюсов (Poles), скалярный или векторный коэффициент передаточной функции (Gain).
Количество нулей не должно превышать число полюсов передаточной функции. Нули и полюса могут быть заданы комплексными числами. На рис. 5.22. показан пример использования блока Zero-Pole.

Рис. 5.22. Пример использования блока Zero-Pole
Задание. Сделать 2…3 модели с использованием блока Zero-Pole