

книги / Сопротивление грунтов (некоторые лекции по курсу Механика грунтов )
..pdfкак вблизи σI, так и вблизи σIII. Для количественной характеристики положения σII вводится параметр, предложенный Лоде и Надаи:
μσ = (2σII – σI – σIII) / (σI – σIII). |
(2.4) |
Если σII = σI, μσ = +1, а если σII = σIII, μσ = –1. Очевидно, что значению μσ = 0 соответствует положение σII в центре главного круга Мора.
В теории упругости касательные напряжения часто выражают через второй инвариант напряжений. Различают октаэдрическое (т.е. отнесенное к равно наклоненной к осям σI, σII и σIII площадкам):
σокт = 2/3 (σI σII)2 (σII σIII)2 (σIII σI)2 |
2/3 |
IIσ |
(2.5) |
|
и интенсивность касательных напряжений |
|
|
|
|
σi = 1/2 (σI σII)2 (σII σIII)2 (σIII σI)2 |
|
IIσ /2. |
(2.6) |
|
2 Что такое деформация
Справки из интернета: «Деформация – лат. Deformatio, искажение: 1. Изменение взаимного расположения точек твердого тела, при котором меняется расстояние между ними, в результате внешних воздействий. Д. называется упругой, если она исчезает после удаления воздействия, и пластической, если она полностью не исчезает. Наиболее простые виды Д. – растяжение, сжатие, изгиб, кручение». И еще: «2. В переносном смысле Д. – изменение формы, искажение сущности чего-либо (напр., деформация социальной структуры)».
Деформации обозначают латинской е (от лат. elasticitat – упру-
гость) или, чаще, греческой буквой ε. |
Различают линейную εz = |
L/L |
|
(например, |
по оси Z) и объемную εv = |
V/V деформации (здесь |
L и |
V – соответственно изменение длины отрезка L и объема тела V, при- |
|||
чем L и |
V могут характеризовать как увеличение длины и объема, т.е. |
||
растяжение, так и уменьшение – сжатие). |
|
||
Так же, как и напряжения, деформации обозначают в виде матрицы, в которой помещают элементы матрицы: по главной диагонали – нормальные деформации (в направлениях, перпендикулярных площадкам), а в строках – касательные деформации (в направлениях, параллельных площадкам). В целом матрица характеризует тензор деформаций Тε, а ее элементы – компоненты тензора деформаций:
61
εхх εхy εхz |
ε11 ε12 ε13 |
|
Тε = εyх εyу εyz |
или, что одно и то же, –Тε = ε21 ε22 ε23 . |
(2.7) |
εzx εzy εzz |
ε31 ε32 ε33 |
|
Подобно напряжениям, парные индексы нормальных деформаций
заменяют на одиночные – εхх на εх, εzz – на εz и др., а компактную форму записи тензора деформаций представляют как Тε = {εij} (i, j = 1, 2, 3).
В качестве первого направления обычно принимают ось Z, а в качестве второго – ось Y, третьего – Х (но иногда и по-другому).
Тензор деформаций для главного направления будет выглядеть так:
εI |
0 |
0 |
|
Тε = 0 |
εII |
0 . |
(2.8) |
0 |
0 εIII |
|
|
Обозначение инвариантов тензора деформаций подобно соответствующим инвариантам тензора напряжений:
– первый (линейный) инвариант Iε = εхх + εyу + εzz = εI + εII + εIII = = const; причем: εI > εII > εIII; первый инвариант будет характеризовать
объемное сжатие грунта;
– второй (квадратный) инвариант IIε = (εI – εII)2 + (εI – εIII)2 +
+(εIII – εI)2 = const; этот инвариант характеризует объемный сдвиг грунта;
–третий (кубический) инвариант IIIε = εI ·εII · εIII = const.
Как видно, здесь сохранено прежнее обозначение инвариантов, но
с соответствующим индексом – ε вместо σ (в некоторых источниках их называют по-другому – J1, J2, J3 или I1ε, I2ε, I3ε и др.).
Для последующего анализа полезно отметить следующие характеристики деформаций:
– средняя объемная деформация
εср (или εV) = Iε / 3; |
(2.9) |
– деформации по равно наклонным площадкам (октаэдрический сдвиг)
εокт = 2/3 (εI εII)2 (εII εIII)2 (εIII εI)2 |
2/3 IIε ; |
(2.10) |
– или обобщенная деформация (либо интенсивность деформаций сдвига)
εi = 2/3 (εI εII)2 (εII εIII)2 (εIII εI)2 |
2/3 IIε . |
(2.11) |
62
3 Как напряжения связаны с деформациями
Упругость – фундаментальное свойство тел деформироваться под действием нагрузки и восстанавливать первоначальную форму и размеры после ее снятия. Понятие «упругость» поясняется с использованием примеров из интернета, популярных учебников (Н.И. Безухов, 1981 [1]; М.Н. Гольдштейн, 1971 [2]; см. также интересную брошюру Д. Гордона, 1971 [3]).
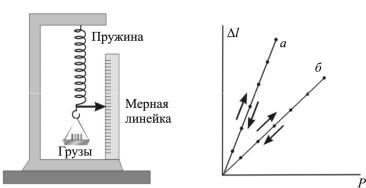
Проявление упругости лучше всего проследить, проведя простой опыт с пружинными весами – динамометром (рис. 2.5).
При нагрузке в 1 кгс стрелка-индикатор сместится на 1 деление, при 2 кгс – на два деления и т.д. Если нагрузки последовательно снимать, процесс идет в обратную сторону. Пружина динамометра – упругое тело, а ее удлинение l, во-первых, пропорционально нагрузке P, во-вторых, полностью исчезает при полном снятии нагрузки.
Если построить график, отложив по горизонтальной оси величины нагрузки, а по вертикальной – удлинение пружины, то получаются точки, лежащие на прямой, проходящей через начало координат (рис. 2.6). Это справедливо как для точек, изображающих процесс нагружения, так и для точек, соответствующих нагрузке, причем прямая а соответствует более мягкой, а прямая б – более жесткой пружине.
Рис. 2.5. Пружинные весы |
Рис. 2.6. График l = f (P) |
Тангенс угла наклона характеристики называется жесткостью пружины С. Теперь можно записать уравнение деформирования пружины l = P / C.
Жесткость пружины С имеет размерность кгс/см (тс/м, кН/м и т.п.) и зависит от материала пружины (например, сталь или бронза) и ее размеров – длины пружины, диаметра ее витка и толщины проволоки, из которой она сделана.
Проявление упругих свойств было давно известно и широко использовалось людьми. Выше уже говорилось о том, что современное понима-
63
ние упругости впервые появилось у Роберта Гука (R. Hooke, 1635–1722), современника (и соперника) И. Ньютона (I. Newton, 1643–1727). В 1660 г. Р. Гук сформулировал свое открытие очень кратко в виде афоризма: «Ut tensio sic vis» («Какова сила, таково и удлинение») и записал его в виде F = –k x, где F – сила, x – линейное растяжение или сжатие образца,
аk – коэффициент упругости.
В1807 г. Т. Юнг (Т. Young, 1773–1829) ввел термин «модуль упру-
гости», впоследствии получивший название модуля Юнга и обозначение Е (от лат. Elasticitat). Вместо силы F (как первоначально у Гука) Юнг предложил учитывать напряжения σ, а вместо удлинения-укоро- чения х – относительные деформации ε. В отличие от коэффициента упругости Гука k модуль упругости Е представляет собой фундаментальную характеристику (константу) для любого материала.
Тем не менее основной закон теории упругости о пропорциональной связи между напряжениями и деформациями вошел в историю как закон Гука, но, что вполне заслуженно, с «именным» коэффициентом пропорциональности – модулем упругости Юнга:
σ = Еε, |
(2.12) |
Физическая природа упругости обусловлена электромагнитным взаимодействием (в том числе в решетках кристаллов). В частности, доказано, что упругие деформации вещества связаны с изменением рас-
стояния между его атомами.
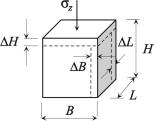
Упругое тело имеет еще одно фундаментальное свойство – сужаться при растяжении и соответственно – утолщаться при сжатии. Если разделить поперечное укорочение-удлинение образца упругого вещества В, L на первоначальный размер образца в этом же направлении В, L (рис. 2.7), получим константу
v = В / В или v = L / L, (2.13)
которая называется коэффициент Пуассона – по имени французского ученого С.Д. Пуассона (S.D. Poisson, 1781–1840).
Модуль E и коэффициент v вместе образуют пару величин, которые полностьюхарактеризуютупругиесвойствалюбогоизотропноговещества – вещества,свойствакоторогоодинаковывовсехнаправлениях.
В случае, когда рассматривается сложное напряженное состояние, закон Гука записывается через компоненты нормальных (осевых) напряжений и деформаций в виде обобщенного закона (и тоже Гука):
64

ε11 |
= [σ11 |
– ν (σ22 + σ33)] / Е |
|
ε22 |
= [σ22 |
– ν (σ33 + σ11)] / Е , |
(2.14) |
ε33 |
= [σ33 |
– ν (σ11 + σ22)] / Е |
|
или, что то же, через первые инварианты тензоров напряжений и деформаций:
Iσ / 3 = К Iε / 3 или σV = КεV. |
(2.15) |
Касательные же напряжения σij записываются через деформации εij так:
σ12 = 2G ε12 |
|
|
σ23 = 2G ε23 |
, |
(2.16) |
σ31 = 2G ε31 |
|
|
а через вторые инварианты тензора напряжений и деформаций так:
Iσ = G IIε. |
(2.17) |
Величина G называется модулем сдвига и выражается через E и v формулой
G = Е / [2(1 + ν)]. |
(2.18) |
Существуют и многие другие формы записи обобщенного закона Гука и соответственно разные формы обозначения упругих параметров (констант): E и ν, G и ν, K и G, λ и μ. Последняя пара упругих констант называется постоянными Лямé (G.L.J.B. Lamé, 1795–1870, работал в России с 1820 по 1832 г.), а запись через них закона Гука следующая:
σх = 2μεхх + λ(εхх + εуу + εzz); τху = Gεху. |
(2.19) |
Независимо от формы представления этих констант, в каждом случае их только две, причем они, как показано в табл. 2.1, могут быть выражены одни через другие, в том числе через принятые здесь параметры Е и ν.
Самая компактная из записей закона Гука, выраженная через первый инвариант тензора напряжений Iσ = σ11 + σ22 + σ33 и так называемый символ Кронекера δij (который может принимать только два значения: δij = 1 при i = j и δij = 0 при i ≠ j), следующая:
εij = [(1 + ν) σij – ν δij Iσ] / Е. |
(2.20) |
65
Таблица 2.1
Соотношения между различными упругими постоянными (М.Н. Гольдштейн [2])
Постоянные |
|
|
Основная пара |
|
|
|
λ,μ |
G, ν |
K, G |
|
E,ν |
E,G |
|
|
|
|||||
λ |
λ |
2G /(1– 2ν) |
К– 2G /3 |
|
νE / |
G (E – 2G)/ |
|
[(1+ν)(1–2ν)] |
(3G – E) |
||||
|
|
|
|
|
||
μ |
μ |
G |
G |
|
Е /[2 (1+ν)] |
G |
G |
μ |
G |
G |
|
Е /[2 (1+ν)] |
G |
E |
(3λ+ 2 μ)μ / |
2G (1 +ν) |
9КG /(3К+ G) |
|
Е |
Е |
|
(λ+μ) |
|
|
|
|
|
K |
λ + 2μ /3 |
2G (1+ ν) / |
К |
|
Е /[3 (1– 2ν)] |
ЕG / |
|
|
[3 (1– ν)] |
|
|
|
[3 (3G – Е)] |
ν |
λ /[2 (λ + μ)] |
ν |
(3К– 2G)/ |
|
ν |
(Е/2G)– 1 |
(6К+ 2G) |
|
|||||
|
|
|
|
|
|
|
Например, чтобы выразить относительную осевую деформацию ε22 в направлении 2–2 (при этом δij = 1), путем подстановки получим
ε22 = [(1 + ν) σ22 – ν · 1 · (σ11 + σ22 + σ33)] / Е = |
|
= [σ22 – ν (σ33 + σ11)] / Е, |
(2.20') |
а чтобы выразить деформацию сдвига σ12 (при этом δij = 0), получим
σ12 = [(1 + ν) σ12 – ν · 0 · (σ11 + σ22 + σ33)] / Е = |
|
= σ12 [(1 + ν) / Е] = 2G ε12. |
(2.20'') |
Следует отметить еще одну форму записи закона Гука для анизотропной среды, у которой характеристики деформируемости различаются в разных направлениях или в разных точках. В общем случае анизотропными являются многие композиционные материалы типа стеклопластика. Но само понятие «упругость» для них оказывается значительно более сложным.
Задачи об учете различной деформируемости тел в разных направлениях служат предметом обсуждения новой ветви теории упругости –
разномодульной теории упругости (С.А. Амбарцумян, 1982 [4]).
В расчетах грунтов встречается случай, когда на одном из этапов нагружения в грунтовой среде в одном или нескольких направлениях происходит сжатие с характеристиками Е и ν, в другом с характеристиками, например, при растяжении – Е+ и ν+, при разгрузке – Е– и ν–.
Целесообразность применения к грунтам этой теории обусловлена тем, что различие модуле деформации при нагружении Е и растяжении Е+, а также при сжатии Е и разгрузке Е– различаются до 2–5, иногда до 10 раз.
66

Заметим, что различие в деформационных характеристиках большинства композиционных материалов редко превышает 2-кратной величины.
Физические соотношения в общем случае выражаются так:
ε11 = а11 |
σ11 + а12 σ22 + а13 σ33 |
|
ε22 = а12 |
σ11 + а22 σ22 + а23 σ33 , |
(2.21) |
ε33 = а13 |
σ11 + а23 σ22 + а33 σ33 |
|
где аij – коэффициенты, которые принимают значения 1/Е, 1/Е+ или 1/Е–; ν/Е, ν+/Е+ или ν–/Е– в зависимости от того, какой процесс – сжатие, растяжение или разгрузка – происходит на конкретном этапе нагружения.
Из энергетических соображений следует, что коэффициенты аij должны быть равны по обе стороны от главной диагонали. Это означает, что для практического использования в грунтах решений разномодульной теории упругости требуется определение характеристик сжимаемости – сжатия – растяжения Е, Е+ и Е–, что практически невозможно. Способов определения коэффициентов поперечной деформации применительно к различным случаям взаимного влияния напряжений разного знака – ν, ν+ и ν– на сегодня не существует.
Поэтому в практических расчетах принимают постоянный коэффициент Пуассона ν = ν+ = ν–, что однако встречает возражения специалистов в области классической теории упругости.
Тем не менее такой подход можно рассматривать как инженерный прием, позволяющий отразить принципиальное и значительное различие в работе грунта при разных знаках дополнительных напряжений, возникающих на определенном этапе нагружения грунтового массива (относительно напряжений, достигнутых на предыдущем этапе).
4 Распределение напряжений в массиве грунта
4.1 Общие представления о распределении напряжений в грунтах
Представление о том, как распределяются напряжения в массиве грунта, можно получить из рис. 2.8, на котором показаны лежащие вдоль оси Х одинаковые трубы или бревна правильной круговой формы, к которым вверху приложена некоторая сила, условно обозначенная как Р = 1. Разумеется, трубы или бревна моделируют грунтовые частицы, а картинка в целом – как весь грунтовый массив. В рассматриваемом случае верхний элемент массива (труба, бревно), к которому приложена сила Р = 1, передает двум нижним элементам второго сверху ряда по половине силы (Р/2), третьего ряда – по половине от сил второго ряда, в результате чего появляется неравномерность распределения сил: на
67
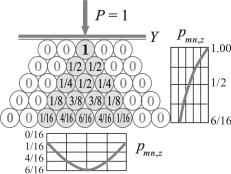
крайние элементы – по Р/4, на центральный – 2 Р/4 = Р/2, поскольку он воспринимает по половине сил от двух элементов 2-го ряда. И так далее, вплоть до бесконечности по глубине.
Можно легко вывести формулу для вычисления сил на каждый их элементов массива, имеющий порядковый номер ряда n и порядковый номер элемента в ряду m, начиная от центра. Однако такая формула не будет иметь практического
значения. Здесь важно отметить, что эти силы подчиняются закону равновесия в каждом ряду; например, в пятом ряду (n = 5): m1 + 2m2 + + 2m3 = 6/16 + 2 · 4/16 + 2 · 1/16 = 16/16 = 1.
Отсутствие практического интереса к подобным формулам объясняется тем, что здесь рассматривается идеализированный случай, когда все элементы массива однотипны, между элементами отсутствует трение и какая-либо связь, препятствующая передаче нагрузки вниз. Кроме того, на рис. 2.8 показан пример идеально плотной упаковки элементов, когда более плотной упаковки просто не существует. В случае же, если размеры элементов меняются, а упаковка менее плотная, ситуация каждый раз меняется.
Кроме того, и это очень важно, рис. 2.8 иллюстрирует плоскую задачу, когда элементы массива простираются бесконечно вдоль оси Х, перпендикулярной плоскости чертежа. Если вместо труб принять шары (или квадратные в плане блоки, кирпичи), передача сил от ряда к ряду уже будет идти по другому закону, поскольку верхний шар будет передавать силу не двум, а трем-четырем нижним шарам (в зависимости от плотности упаковки). Легко показать, что в случае шаров иллюстрируется подобие пространственной задачи, когда действие силы будет распространяться на меньшее расстояние по глубине (координаты Z), а сила будет убывать от ряда к ряду против плоского случая, хотя в обоих случаях действие ее распространяется до бесконечной глубины.
Грунтовые частицы можно уподобить шарам, трубам или кирпичам, но, как правило, разного размера, вплоть до микроскопического. Они могут быть как связаны, так и не связаны с соседними частицами, но общая тенденция к уменьшению сил с глубиной будет сохраняться, причем по-разному в плоском и в пространственном случаях.
В целом нужно отметить, что существует целое научное направление в механике (см. И.И. Кандауров, 1966 [5] и др.), которое занимается
68
вопросами распределения напряжений в дискретных средах, какими являются любые раздробленные вещества – зерно, мука, руда, шлаки, а в частном случае – грунты.
При переходе к бесконечно малым размерам частиц пользуются уже не силами, а напряжениями – теми же силами, но распределенными по некоторой площадке, размер которой может быть разным – от бесконечно малого (как в теории упругости) до конечного. Считается, что размер площадки, на которой будет анализироваться распределение сил, должен быть в 20–30 раз больше размера частиц. Это реально, поскольку площадки, по которым распределяются силы, обычно принимаются равными по площади 1 см2 или 1 м2, т.е. существенно превосходящими размеры большинства грунтовых частиц.
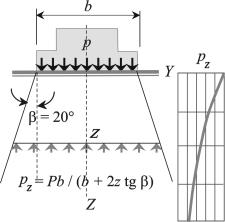
Взаключение пояснения распределения сил и напряжений в массиве на рис. 2.9 приводится еще один пример распределения напряжений в плоской задаче, в которой напряжения в сплошной (не дискретной) среде принимаются распределенными под «углом видимости» β; обычно принимается
β= 20…30°.
Вобщем случае распределение напряжений на некоторой глу-
бине z принимается по какому- |
Рис. 2.9. Распределение напряжений |
либо закону: равномерному, пара- |
в плоской задачепод«углом видимости» |
болическому, треугольному, по кривой нормального распределения случайных величин К.Ф. Гаусса
(J.C.F. Gauß, 1777–1855) и др. Для равномерного распределения формула для напряжений приведена на рис. 2.9. Очевидно, что для пространственного случая – прямоугольного фундамента со сторонами l (длина) и b (ширина), нагруженного равномерно распределенной нагрузкой р, формула для рz имеет вид
рz = р l b / [(b + 2 z tg β) (l + 2 z tg β)], |
(2.22) |
а для ленты, у которой длина превышает ширину в 10 раз и более, |
|
рz = р b / (b + 2 z tg β). |
(2.22') |
В табл. 2.2 приведено сравнение расчетов вертикальных напряжений при угле видимости β, равном 20° и 30° для фундамента со сторонами l b = 2.8 2.0 м (пространственная задача) и для ленты шириной b = 2.0 м (плоская задача) при давлении по подошве р = 20 тс/м2.
69

|
|
|
|
|
|
|
Таблица 2.2 |
|
|
Распределение вертикальных напряжений по глубине |
|
||||||
|
|
|
|
|
|
|
||
Глубина z, |
Напряжения σz, тс/м2,приуглевидимости |
Теория упругости |
||||||
β=20° |
|
β =30° |
|
|||||
м |
|
|
|
|
||||
фундамент |
|
лента |
фундамент |
|
лента |
фундамент |
лента |
|
|
|
|
||||||
0.0 |
20.0 |
|
20.0 |
20.0 |
|
20.0 |
20.0 |
20.0 |
0.4 |
15.8 |
|
17.5 |
13.9 |
|
16.2 |
19.4 |
19.5 |
1.2 |
10.6 |
|
13.9 |
7.9 |
|
11.8 |
13.6 |
15.1 |
2.4 |
6.6 |
|
10.7 |
4.2 |
|
8.4 |
6.5 |
9.5 |
4.0 |
4.0 |
|
8.1 |
2.3 |
|
6.0 |
2.1 |
6.1 |
6.0 |
2.5 |
|
6.3 |
1.3 |
|
4.5 |
1.4 |
4.2 |
12.0 |
0.9 |
|
3.7 |
0.4 |
|
2.5 |
0.4 |
2.1 |
В дальнейшем будет показано, как та же задача решается методами теории упругости (соответствующие значения σz приведены в двух последних столбцах таблицы).
Как видно из табл. 2.2, различия в расчетах между решениями не очень значительны, что вполне объяснимо упрощенной схемой «угла видимости».
Примеры иллюстрируют различие плоской и пространственной задач: при «углах видимости» β = 20…30°, как и по теории упругости, в пространственной задаче напряжения на глубине 4 м примерно в 2 раза меньше, чем в плоской.
Несмотря на очевидную условность схемы с «углами видимости», эти формулы до сих пор используются для приблизительной оценки распределения напряжений по глубине.
4.2 Как решается задача о распределении напряжений методами теории упругости
Выше уже говорилось о том, что в расчетах фундаментов специалисты постепенно начиная с конца ХIХ в. стали подходить к использованию задач о распределении напряжений в сплошных средах, которые до этого ранее решались примерно 300 лет многими учеными, начиная с Г. Галилея, а, скорее всего, много раньше. Знания в этой области со временем оформились в самостоятельную науку – теорию упругости и входят в состав наук еще более высокого уровня. А знания из теории упругости (с корректировками на учет существенных особенностей происхождения и свойств грунтов) «перетекали» в постепенно формирующуюся с 1920–30-х гг. самостоятельную науку об основаниях и фундаментах и ее теоретического раздела – механики грунтов.
Началом классической механики грунтов можно считать 1885 г., когда была опубликована работа французского академика Ж.В. Бусси-
70