


16
где параметры a1, b1, ω1* соответствуют т. А, параметры a2, b2, ω2* соответствуют т. В.
Таким образом, при заданном коэффициенте k1 можно найти область устойчивости замкнутой системы по коэффициентам k2 , k3 .
Следует отметить, что рассмотренный способ в отличие от критерия Гурвица можно использовать для систем высокой размерности и с учетом запаздывания.
1.3. Методика настройки параметров регулятора
Для настройки параметров регулятора (1), обеспечивающего наименьшие значения показателей качества εуст , tp , σ можно воспользоваться следующей
методикой.
1. Задается допустимая область Ω0 изменения параметров: 0 ≤ ki ≤ ki ,
i=1,3.
2.Определяется коэффициент k1 ≤ k1 из условия заданной точности εуст в
установившемся режиме для выбранного входного воздействия.
3.Определяется область Ω1 устойчивости по коэффициентам k2 , k3 .
4.При фиксированных коэффициентах k1 и k3 ( k3 = 0 ) в пересечении областей Ω0 ∩Ω1 осуществляется изменение коэффициента k2 так, чтобы по результатам моделирования снизились показатели качества tp , σ .
5.Увеличивается и фиксируется коэффициент k3 , и выполняется п.4.
6.Если желаемые показатели качества tp , σ не достигнуты, то увеличи-
вается коэффициент k1 и осуществляется переход к п. 3, в противном случае,
настройка коэффициентов заканчивается.
2.Расчетная часть
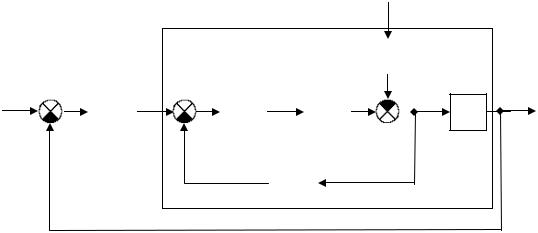
Вкачестве обобщенного ОУ (рис. 9) рассмотрим последовательно соединенные усилитель мощности и двигатель постоянного тока с независимым воз-
17
буждением и якорным управлением, охваченные обратной связью с помощью
тахогенератора с коэффициентом передачи kтг , а также редуктор и нагрузку. При этом в зависимости от вида передаточной функции W0 ( p) выходной координатой y(t) может быть угловая скорость ω(t) или угол α(t) поворота вала редуктора, жестко связанного с инерционной нагрузкой.
|
|
|
|
|
|
|
|
|
Mн |
|
|
|
|
|
|
ОУ |
|
|
|
|
|||
|
|
|
|
|
f |
|
|
||||
|
|
|
|
|
|
|
|
Wдв |
|
|
|
g ε |
|
u |
|
|
|
|
|
|
ω |
y |
|
|
Wрег |
|
Wу |
|
Wдв |
|
|
|
|
W0 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kтг |
|
|
|
|
|
|
|
Рис. 9 Пренебрегая индуктивностью якоря, нелинейностями характеристик дви-
гателя, редуктора и усилителя мощности, передаточные функции ОУ в соответствии с рис. 1 можно представить в виде
W ( p) =W1( p)W0 ( p) , W f ( p) =W1f ( p)W0 ( p) ,
где
|
|
|
W ( p)W ( p) |
|
|
|
W f |
( p) |
|
||||||
W ( p) = |
|
|
|
|
y |
дв |
|
, W f ( p) = |
|
|
дв |
|
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
1 |
+Wy ( p)Wдв( p)kтг |
1 |
1 |
+Wy ( p)Wдв( p)kтг |
|
|||||||||
|
|
|
|||||||||||||
|
|
|
k |
|
, |
если |
y(t) =ω(t) = k ω(t); |
|
|
||||||
|
|
|
p |
|
|
|
|
p |
|
|
|
|
|
||
W ( p) = |
k |
p |
|
|
|
t |
|
|
|
|
|
||||
0 |
|
|
|
|
, |
если |
y(t) =α(t) = kp ∫ω(τ)dτ; |
|
|
||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
p |
|
|
|
|
0 |
|
|
|
|
|
||
Wy ( p) – передаточная функция усилителя мощности; Wдв( p) , Wдвf ( p) – переда-
точные функции двигателя по скорости с учетом редуктора и инерционной на-
18
грузки; kp – коэффициент передачи редуктора.
С учетом инерционности усилителя мощности, его передаточная функция
имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
( p) = |
ky |
|
|
, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
y |
Ty p +1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
где Ty |
– постоянная времени, ky |
– коэффициент усиления. |
|||||||||||
Для двигателя полагаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
дв |
|
W f |
|
|
|
|
|
k f |
|
|
W ( p) = |
|
|
, |
( p) = |
|
дв |
, |
|||||
|
|
|
|
|
|
||||||||
|
дв |
Tдв p +1 |
дв |
|
|
|
Tдв p +1 |
||||||
|
|
|
|
|
|
|
|||||||
где T |
– постоянная времени двигателя, k |
дв |
и k f |
– коэффициенты передачи |
|||||||||
ДВ |
|
|
|
|
|
|
|
|
|
дв |
|
|
|
двигателя по напряжению и моменту нагрузки соответственно.
В качестве исходной системы и ее параметров используется один из вариантов, приведенный в таблицах 1,2, который задается преподавателям.
Таблица 1. Система стабилизации скорости: g(t) = a , W0 ( p) = kр
№ |
Усилитель |
|
Двигатель |
|
Тахо- |
Редук- |
Команда |
Возму- |
||
|
|
|
|
|
|
|
генератор |
тор |
|
щение |
|
ky |
Ty , |
kдв, |
|
kдвf , |
Tдв , |
kтг , |
kр |
a , |
Mн, |
|
|
с |
(В·с)-1 |
|
(Н·м·с)-1 |
с |
В·с |
|
с-1 |
Н·м |
1 |
10 |
0,05 |
0,1 |
|
10-3 |
1 |
0 |
0,2 |
1 |
103 |
2 |
10 |
0,04 |
0,12 |
|
10-3 |
1 |
0 |
0,2 |
1 |
103 |
3 |
20 |
0,03 |
0,13 |
|
10-3 |
0,5 |
0 |
0,1 |
2 |
103 |
4 |
20 |
0,02 |
0,14 |
|
10-3 |
0,6 |
0,8 |
0,1 |
2 |
103 |
5 |
20 |
0,01 |
0,15 |
|
10-3 |
0,7 |
0,8 |
0,1 |
2 |
103 |
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|
|
Таблица 2. Следящая система по углу: g(t) = at , W0 ( p) = kр / p |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
№ |
Усилитель |
|
Двигатель |
|
Тахо- |
Редук- |
Команда |
Возму- |
|||
|
|
|
|
|
|
|
генератор |
тор |
|
щение |
|
|
ky |
Ty , |
kдв, |
|
kдвf , |
Tдв , |
kтг , |
kр |
a , |
Mн, |
|
|
|
с |
(В·с)-1 |
|
(Н·м·с)-1 |
с |
В·с |
|
с-1 |
Н·м |
|
1 |
10 |
0,05 |
0,1 |
|
10-3 |
1 |
0 |
0,2 |
1 |
103 |
|
2 |
10 |
0,04 |
0,12 |
|
10-3 |
1 |
0 |
0,2 |
1 |
103 |
|
3 |
20 |
0,03 |
0,13 |
|
10-3 |
0,5 |
0 |
0,1 |
2 |
103 |
|
4 |
20 |
0,02 |
0,14 |
|
10-3 |
0,6 |
0,8 |
0,1 |
2 |
103 |
|
5 |
20 |
0,01 |
0,15 |
|
10-3 |
0,7 |
0,8 |
0,1 |
2 |
103 |
|
2.1.Расчет установившейся ошибки
1.Для заданного варианта системы определить передаточную функцию разомкнутой системы Wраз( p) =Wрег( p)W ( p) .
2.Определить выражение установившейся ошибки εуст по командному
сигналу (с помощью формул (10), (11)) и возмущению для различных законов управления и занести в таблицу 3. Сделать вывод о достижимой точности системы.
Таблица 3. Установившаяся ошибка по команде
№ |
Наименование регулятора |
|
Wрег( p) |
|
Установившаяся ошибка εуст |
|||
|
|
по g(t) |
по Mн |
|||||
1 |
Пропорциональный (П) |
|
|
k1 |
|
|
|
|
4 |
Пропорционально- |
|
k1 + k2 p |
|
|
|
||
|
дифференциальный (ПД) |
|
|
|
|
|
|
|
5 |
Пропорционально- |
|
k |
+ k3 |
|
|
|
|
интегральный (ПИ) |
|
1 |
|
p |
|
|
|
|
|
|
|
|
|
|
|
||
6 |
Пропорционально-интегро- |
k |
+ k |
2 |
p + k3 |
|
|
|
дифференциальный (ПИД) |
1 |
|
p |
|
|
|||
|
|
|
|
|
|
|
||