

7
тельной устойчивости.
1.2. Прямые показатели качества замкнутой системы
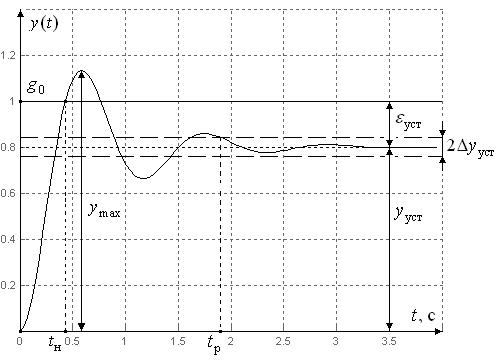
Для оценки свойств переходных процессов устойчивой системы используется график реакции выхода системы y(t) на ступенчатое воздействие g0 1(t) , g0 = const при нулевых начальных условиях. Пример реакции y(t) при g0 =1 приведен на рис. 2.
Рис. 2
Здесь определяются следующие прямые показатели качества: 1) установившаяся ошибка εуст = g0 − yуст ;
2) время регулирования tp – минимальное время, по истечении которого выходная координата y(t) входит в трубку величиной 2 yуст и не покидает ее, т.е. выполняется условие | y(t) − yуст |≤Δ yуст для t ≥tp (обычно = 0,05);
3) перерегулирование σ , которое определятся по формуле

|
|
|
8 |
|
σ = |
ymax − yуст |
100 %. |
(9) |
|
yуст |
||||
|
|
|
4) время нарастания tн – минимальное время, при котором y(tн) = g0 . Наилучшим считается процесс с наименьшими значениями указанных по-
казателей качества.
Наряду с переходной характеристикой рис. 2 для анализа качества переходных процессов можно использовать функцию ошибки ε(t) = g0 1(t) − y(t) . Типовой переходный процесс по ошибке при ступенчатом входном воздействии g(t) = g0 1(t) для g0 =1 приведен на рис. 3, который может быть построен по рис. 2.
Рис. 3
Здесь указанные выше прямые показатели качества с учетом равенства y(t) = g0 1(t) −ε(t) , yуст = g0 −εуст можно переписать следующим образом:
1) установившаяся ошибка εуст ;
2) время регулирования tp – минимальное время, по истечении которого
ε(t) входит в трубку величиной 2 (g0 −εуст) и не покидает ее, т.е. выполняется условие | ε(t) −εуст |≤Δ(g0 −εуст) для t ≥tp ;

9 3) величина перерегулирования σ с учетом равенства ymax = g0 −εmin за-
писывается в виде
σ = εуст −εmin 100% .
g0 −εуст
Рассмотрим возможности закона управления (2) для достижения заданных показателей качества замкнутой системы.
1.2.1. Установившаяся ошибка
Установившаяся ошибка устойчивой системы может быть найдена по теореме о конечном значении оригинала
εуст = lim ε(t) = lim pε( p) , |
(10) |
|
t→∞ |
p→0 |
|
если известно, что существует предел εуст = lim ε(t) = const . Здесь изображение |
||||
|
|
t→∞ |
|
|
ошибки по Лапласу ε( p) определяется по формуле |
|
|||
1 |
|
|
|
|
ε( p) = |
|
|
g( p) , |
(11) |
1+W |
( p) |
|||
|
раз |
|
||
а) Пусть задающее воздействие является |
ступенчатой функцией |
|||
g(t) = g01(t) , соответственно g( p) = g0 / p . Тогда получим изображение ошибки
ε( p) = |
|
|
|
1 |
|
|
|
g0 |
. |
|
||
1 |
+W |
|
( p) p |
|
||||||||
|
|
|
|
|||||||||
|
|
|
|
раз |
|
|
|
|
|
|
||
Полагая Wраз(0) =bm / cn = kраз >0, |
где kраз |
– коэффициент усиления ра- |
||||||||||
зомкнутой системы, найдем |
|
|
|
|
|
|
|
|
|
|
|
|
εуст = lim pε( p) = |
|
g0 |
|
=εст . |
(12) |
|||||||
1+ kраз |
||||||||||||
p→0 |
|
|
|
|
|
|
||||||
Значение ошибки εст называется статической ошибкой. Системы, у которых

10
статическая ошибка не равна нулю, называются статическими по отношению к заданному входному воздействию. Системы, у которых статистическая ошибка равна нулю, называются астатическими. Астатизм системы обусловлен наличием в разомкнутой системе интегрирующих звеньев, т.е. передаточная функция астатической системы может быть представлена в виде
= m( p) Wраз( p) pvdv ( p) ,
где v =1,2,... – порядок астатизма, полином dv ( p) не имеет нулевых корней. Действительно, в этом случае при постоянном входном воздействии по-
лучим |
|
|
|
|
|
|
|
|
|
ε |
уст |
= lim p |
pvd |
v |
( p) |
|
g |
0 |
= 0 . |
pvdv ( p) + m( p) |
|
p |
|||||||
|
p→0 |
|
|
||||||
б) Если входное воздействие является линейно нарастающей функцией времени g(t) = g1t , соответственно g( p) = g1 / p2 , и степень астатизма v =1 (астатизм первого порядка), то
ε |
уст |
= lim p |
|
pd1( p) |
|
|
g1 |
= |
|
g1 |
=ε |
ск |
, |
(13) |
|||||||||||
|
pd1( p) + m( p) |
p2 |
kраз |
||||||||||||||||||||||
|
p→0 |
|
|
|
|
|
|
|
|||||||||||||||||
где kраз = m(0) / d1(0) >0 , εск – называется скоростной ошибкой. |
|
||||||||||||||||||||||||
В этом случае изображение выхода y(t) равно |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
Wраз( p) |
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
y( p) = |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
+W ( p) |
p2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
раз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а изображение скорости выхода |
y(t) = |
dy (t ) |
можно записать при нулевых на- |
||||||||||||||||||||||
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
чальных условиях в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Wраз( p) |
|
|
g |
|
|
|
|
||||||||
|
|
|
|
py( p) = |
|
|
|
|
|
|
|
|
|
|
|
1 |
. |
|
|
|
(14) |
||||
|
|
|
|
1 |
+W |
( p) |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
раз |
|
|
|
|
|
|
|
|
|
|
|
|
Оригинал y(t) изображения (14) является реакцией на ступенчатое воз-