

lec7
.pdfВ.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
7.Обнаружение сигналов
7.1.Постановка задачи обнаружения сигналов
Среда, где распространяется сигнал
РПдУ  +
+  РПУ
РПУ
Рис.7.1. К постановке задачи обнаружения сигналов
Радиопередающее устройство (РПдУ) на интервале времени с вероятностью передаѐт детерминированный (квазидетерминированный) сигнал длительностью . Распространяясь от РПдУ к радиоприѐмному устройству (РПУ), сигнал подвергается искажающему воздействию аддитивной помехи в виде
центрированного белого |
гауссова шума |
со спектральной |
||
плотностью мощности |
|
|
. В результате чего на входе |
|
|
|
|||
РПУ наблюдается реализация процесса |
, который представ- |
|||
ляет собой смесь сигнала и шума в случае, если сигнал передавался, или только шум, если сигнал не передавался:
|
|
|
, |
(7.1) |
где |
- событие «сигнал передаѐтся РПдУ», возникающее с ве- |
|||
роятностью |
; |
- событие «сигнал не передаѐтся |
||
РПдУ», противоположное для |
и возникающее с вероятностью |
|||
|
|
. |
|
|
|
Требуется |
определить правило и соответствующею |
ему |
|
структуру устройства (обнаружителя), которое оптимальным об-
разом по результатам обработки реализации |
процесса |
|
позволяет принять одно из двух решений: |
– «Сигнал переда- |
|
вался РПдУ» или |
– «Сигнал не передавался РПдУ». |
|
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
7.2. Критерий оптимальности Байеса
Задача обнаружения сигнала является вероятностной. Каждому акту обнаружения предшествует наступление одного из событий или . Эти события являются доопытными или априорными. В результате каждого акта обнаружения возникает одно из событий или . Эти события являются после опытными или апостериорными. Рассмотрим возможные ситуации, которые могут возникать в системе (рис.7.1):
1.– сигнал передаѐтся и принято решение, что сигнал передаѐтся;
2.– сигнал передаѐтся и принято решение, что сигнал не передаѐтся;
3.– сигнал не передаѐтся и принято решение, что сигнал передаѐтся;
4.– сигнал не передаѐтся и принято решение, что сигнал не передаѐтся;
Поставим в соответствие каждой из рассмотренных ситуаций стоимость (риск), характеризующую, например, стоимость последствий, которые наступают вслед за возникновением той или иной ситуации (табл.7.1).
Табл. 7.1.
Событие |
Риск |
Вероятность |
|
|
|
|
|
|
|
|
|
|
|
|
Сами значения рисков определяются желательностью или не
желательностью соответствующей |
ситуации. |
События |
и |
|
соответствуют случаям, когда принимается правильное ре- |
||||
шение, поэтому обычно полагают |
, |
|
. |
Путѐм |
выбора значений рисков для ситуаций |
и |
можно за- |
||
дать, какая из них является более нежелательной. |
|
|
||
Рассмотрим упрощѐнный пример формирования таблицы рисков. Предположим, что РТС обнаружения используется в контуре противовоздушной обороны некоторого объекта. В ситуации цель присутствует в рабочей зоне РТС и обнаружена, что
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
повлечѐт за собой вылет истребителей и уничтожение противника. Риск, связанный с правильным обнаружением, можно положить равным нулю. В ситуации цель присутствует в рабочей зоне РТС, но не обнаружена (имеет место пропуск цели), что повлечѐт за собой прорыв противника на охраняемую территорию, выполнение им поставленных боевых задач, например уничтожение зданий, сооружений или иных охраняемых объектов. Риск, связанный с пропуском цели, исчисляется в стоимости уничтоженных объектов, стоимости их восстановления, стоимости ликвидации других последствий налѐта. В ситуации цель отсутствует в рабочей зоне РТС, но принято решение о еѐ
наличии (имеет место ложная тревога), что повлечѐт за собой вылет истребителей. Риску, связанному с ложной тревогой, можно сопоставить стоимость потраченного впустую топлива и возможную стоимость последствий обусловленных отсутствием полного состава истребителей в расположении главных сил. В ситуации
цель отсутствует в рабочей зоне РТС и принято решение о еѐ отсутствии (имеет место правильное не обнаружение). Риск, связанный с правильным не обнаружением можно положить равным нулю.
В каждом конкретном акте обнаружения сигнала приходится «заплатить» ту или иную сумму в зависимости от того, какой из четырѐх возможных случаев реализовался, то есть мы имеем дело со случайной величиной, закон распределения которой определяется вторым и третьим столбцами табл.7.1. Рассматривая многократное повторение актов обнаружения сигнала, введѐм в
рассмотрение среднее значение риска (средний риск):
. (7.2)
Оптимальным по критерию Байеса является правило принятия решения, обеспечивающее минимальное значение среднего риска:
.
Преобразуем выражение для среднего риска с учѐтом теоремы о произведении событий:
|
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) |
|
strts-online.narod.ru |
|
, (7.3) |
где |
– вероятность того, что принято решение о на- |
личии сигнала при условии, что он передаѐтся (вероятность правильного обнаружения сигнала или обнаружения цели);
- вероятность того, что принято решение об отсутствии сигнала при условии, что он передаѐтся (вероятность неправильного не обнаружения сигнала или пропуска цели);
– вероятность того, что принято решение о наличии сигнала при условии, что он отсутствует (вероятность неправильного обнаружения или ложной тревоги);
- веротяность того, что принято решение об отсутствии сигнала при условии, что он отсутствует (вероятность
правильного не обнаружения сигнала). |
|
||
Так как |
, то |
|
|
|
|
; |
(7.4) |
|
|
. |
|
|
|
|
|
Выражая из (7.4) |
и (7.3) преобразуем следующим образом: |
||
|
|
|
|
|
|
|
|
(7.5) |
|
|
|
|
|
|
|
|
. |
где |
|
|
, |
|
|
|
|
(7.6) |
|
|
|
||||||
|
, |
|
|
. |
|
|
||
|
|
|
|
|
||||
|
Как видно из полученного выражения, для минимизации |
|||||||
среднего риска следует максимизировать величину |
: |
|||||||
|
|
|
|
|
|
. |
|
(7.7) |
7.3. Правило принятия решения о наличии или отсутствии |
||||||||
|
|
|
|
сигнала |
|
|
|
|
|
Рассмотрим случай, когда процесс |
обрабатывается дис- |
||||||
кретно, то есть используются его отсчѐты в моменты времени, равноотстоящие друг от друга на интервал дискретизации . Поскольку дискретная обработка корректна только по отношению к сигналам с ограниченным спектром, то вместо белого шума рассматривается квазибелый. Ширина спектра сигнала должна быть
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
меньше ширины спектра шума. Период дискретизации выбирается так, чтобы не нарушить условие теоремы Котельникова:
|
|
|
|
, |
|
|
|
|
|
(7.8) |
|
|
|
|
|
|
|
||||
где |
|
- максимальная частота в спектре шума. |
|
|
||||||
Обозначим: |
|
|
|
|
|
|
||||
|
|
- момент дискретизации; |
|
|
|
|
|
|
||
|
|
- отсчѐт сигнала в момент времени |
; |
|
|
|||||
|
|
- отсчѐты реализации квазибелого гауссова шума со |
||||||||
спектральной плотностью мощности |
|
|
|
в |
полосе частот |
|||||
|
|
|
||||||||
|
|
(рис.3.8); |
|
|
|
|
|
|
||
|
|
– отсчѐты реализации обрабатываемого процесса; |
|
|||||||
|
; |
|
|
|
|
|
|
|
|
|
|
|
- количество отсчѐтов на интервале |
|
. |
|
|||||
|
|
|
|
|||||||
|
Когда сигнал присутствует, процесс |
, |
характеризуемый |
|||||||
ПРВ |
|
, имеет математическое ожидание |
|
|||||||
|
|
|
|
|
|
|
|
|
. |
(7.9) |
|
|
|
|
|
|
|
|
|
|
|
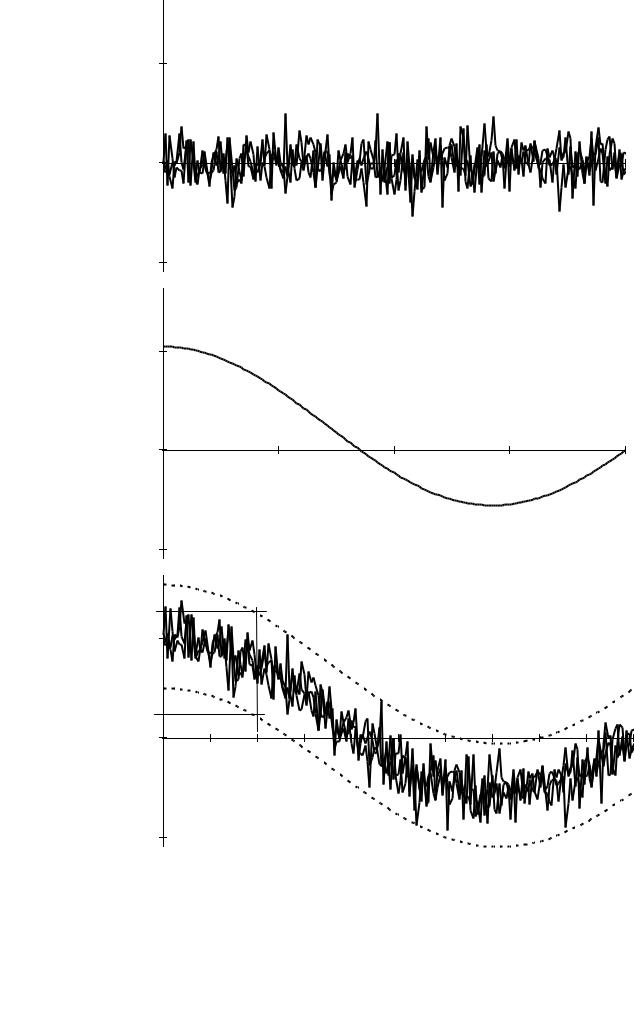
Последнее означает, что реализации |
в среднем оказываются |
|||||||||
сосредоточенными около графика сигнала (рис.7.2) |
|
|||||||||
|
|
|
|
|
, |
|
|
|
(7.10) |
|
то есть лежат в некоторой области |
|
|
|
|
плоскости |
|||||
, границы которой показаны на рис.7.2 пунктиром.
При этом, если обрабатываемая реализация лежит в области , то должно приниматься решение о наличии сигнала, если нет – то решение о его отсутствии:
|
; |
(7.11) |
|
. |
|
|
|
|
Вероятность правильного обнаружения – это вероятность |
||
того, что при условии наличия сигнала, случайный процесс |
в |
|
дискретные моменты времени |
принимает значения, соот- |
|
ветствующие области . С учѐтом (3.8) |
|
|
. (7.12)
где - ПРВ обрабатываемого процесса при условии, что сигнал присутствует.
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) |
strts-online.narod.ru |
n(t) |
t |
s(t) |
|
t |
b0 |
s(t) n(t) |
bi |
|
a0 |
bN 1 |
|
|
ai |
|
|
t |
|
ti |
|
aN 1 |
|
Рис.7.2. Реализации шума, сигнал и их аддитивная смесь. |
В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
|
Вероятность ложной тревоги – это вероятность того, что при |
||
условии отсутствия сигнала, случайный процесс |
в дискрет- |
||
ные |
моменты времени |
принимает значения, |
соответст- |
вующие области |
|
|
|
|
|
, |
(7.13) |
где |
- ПРВ обрабатываемого процесса при ус- |
||
ловии, что сигнал отсутствует. |
|
|
|
Как установлено выше (7.7), для минимизации среднего риска следует максимизировать величину
(7.14)
.
Максимизация (7.14) сводится к соответствующему выбору области интегрирования. Прежде чем сделать это обратимся к простому одномерному примеру.
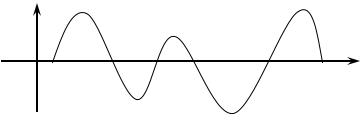
Пусть требуется выбрать область интегрирования некоторой функции , график которой показан на рис.7.3, так, чтобы максимизировать интеграл
|
|
|
|
. |
|
f(x) |
|
|
|
|
|
|
|
+ |
+ |
|
+ |
|
|
|
|
x |
|
0 |
x0 |
|
x1 _ x2 x3 _ |
x4 |
|
|
x5 |
Рис.7.3. Выбор области интегрирования в одномерном случае
В соответствии с геометрическим смыслом значение интеграла даѐт площадь фигуры на отрезке интегрирования ограниченной осью абсцисс и графиком подынтегральной функции. При интег-
рировании на интервалах |
, |
, |
значение инте- |
|
грала будет положительным, на интервалах |
, |
- от- |
||
рицательным. Соответственно, если требуется получить как можно большее значение интеграла, то в качестве области интегрирования следует выбрать область
,

В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
в которой подынтегральная функция положительна:
.
Аналогично, рассматривая многократный интеграл (7.14) соответственно его геометрическому смыслу (как гиперобъѐм, соответствующий многомерной фигуре, определяемой подынтегральным выражением), приходим к выводу, что для того чтобы получить как можно большее его значение, в качестве области интегрирования следует выбрать область, в пределах которой подынтегральное выражение положительно. То есть область , где располагаются смеси сигнала и шума, соответствующая критерию оптимальности Байеса, определяется неравенством
|
|
|
|
, |
или |
|
|
|
|
|
|
|
. |
(7.15) |
|
|
|||
Функция |
называется отношением правдопо- |
|||
добия. Домножив числитель и знаменатель дроби, определяющей
отношение правдоподобия, на |
, с учѐтом (3.3) запи- |
||
шем |
|
||
|
|
|
|
(7.16)
.
Последнее выражение определяет отношение правдоподобия как
отношение вероятности того, что случайный процесс |
в дис- |
||
кретные моменты времени |
принимает бесконечно близ- |
||
кие к набору |
значения при наличии сигнала к вероятно- |
||
сти этого же события при отсутствии сигнала.
Решение о наличие или отсутствии сигнала, как указывалось выше, принимается в случае, когда отсчѐты обрабатываемой реализации попадают в область , то есть удовлетворяют неравенству (7.15), и правило принятия решения (7.11) можно переписать в виде:

В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
. |
(7.17) |
|
При принятии решения следует вычислить отношение правдоподобия для отсчѐтов реализации обрабатываемого процесса и сравнить его значение с .
Отметим, что второе неравенство из (7.17) можно исключить, так как оно может быть получено логическим отрицанием первого.
В частном случае, когда риск правильных решений нулевой
|
|
|
|
, |
|
||
а ошибочные решения равнозначны |
|
||||||
|
|
|
|
, |
|
||
(7.6) даѐт значение |
|
|
|
, а правило принятия решения |
|||
|
|
||||||
(7.17) перепишется в виде: |
|
|
|
|
|||
|
|
|
|
. |
(7.18) |
||
|
|
|
|
||||
Преобразуем левую часть (7.18), подставляя (7.16):
|
|
|
|
|
, |
теперь правило принятия решения (7.18) принимает вид: |
|
||||
|
|
||||
|
|
, |
(7.19) |
||
|
|||||
то есть решение о наличии сигнала принимается, когда гипотеза о наличии сигнала является более вероятной, чем гипотеза о его отсутствии, при условии, что получена совокупность отсчѐтов реализации . Это условие называется критерием идеального наблюдателя или критерием оптимальности Котельникова.
Если дополнительно наличие или отсутствие сигнала на входе обнаружителя равновероятно, то есть , то
, а (7.17) принимает вид
, |
(7.18а) |
или с учѐтом (7.16):

В.Н. Исаков Статистическая теория радиотехнических систем (курс лекций) strts-online.narod.ru
. (7.18б)
Правило (7.18а) называется правилом максимального правдоподобия. Соответственно ему решение о наличии сигнала принима-
ется, когда вероятность того, что случайный процесс |
в мо- |
|
менты времени |
принимает значения бесконечно близкие к |
|
набору отсчѐтов обрабатываемой реализации |
при усло- |
|
вии, что сигнал присутствует, больше такой же вероятности при отсутствии сигнала.
Непрерывную (аналоговую) обработку сигнала можно рассматривать, как предельный случай дискретной обработки, когда
|
, при этом: |
|
1. |
, квазибелый шум |
переходит в белый; |
2. |
Набору значений соответствует непрерывная функция |
|
;
3.Отношение правдоподобия преобразуется в функционал правдоподобия:
;
4.Неравенство (7.15), определяющее область, где располагаются реализации аддитивной смеси сигнала и шума имеет вид:
.
5.Правило принятия решения (7.17) в случае непрерывной обработки:
. |
(7.17а) |
7.4. Обнаружение детерминированного сигнала 7.4.1. Структура оптимального обнаружителя сигналов
Выражение для корреляционной функции квазибелого шума
(3.85) при |
|
|
запишется в виде: |
(7.20) |
|||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
. |
||
|
|
|
|
|
|||||||
Корреляционная функция обращается в ноль при значениях сво-