

2.3. Форма собственных колебаний
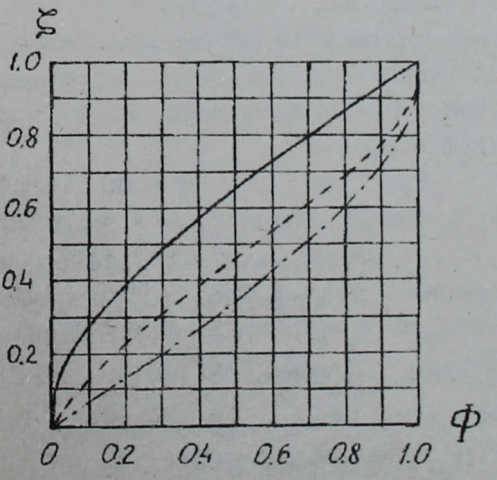
Форма собственных колебаний Ф представляет собой барашерную функцию, определяющую искривление упругой оси условного расчетного стержня во время динамических раскачиваний верхнего строения.В качестве аргумента такой функции используется безразмерная координатаζ=y/L. Строго говоря, точное нахождение функции Ф, также как и определение собственной частотыΩпредставляет весьма сложную задачу. В первом приближении эта функция может быть заменена уравнением упругой линии статического изгиба расчетного стержня при условии соблюдения граничных условий на его концах. Для консольно защемленной балки с постоянной по длине жесткостью EJ такая функция равна [2.]
Ф = 0.5(3- ζ) ζ2, (12)
В нашем случае график функции Ф=f(ζ)удобно изобразить так, чтобы аргумент откладывался снизу вверх по вертикальной оси, а значения самой функции Ф – по горизонтали вправо. В таком виде функция Ф(ζ)лучше отображает действительный характер деформации опор сооружения. График функция Ф(ζ) приведен на рис 4: сплошной линией - для МСБП (расчетный стержень жестко заделан в грунте и свободен на верхнем конце); штрих – пунктирной линией для СПБГУ в случае ее свободного опирания (жесткая заделка вверху и шарнирная опора на уровне грунта) и пунктирной линией для СПБУ с частичным защемлением опорных колонн в их нижних сечениях. Такой случай возникает у СПБУ с опорным матом на уровне грунта. Видно, что с увеличением коэффициента защемления нижнего сечения опор ординаты функции формы Ф уменьшаются, что свидетельствует о возрастании жесткости сооружения.
2.4. Вынужденные колебания под воздействием внешнего усилия, изменяющемуся по гармоническому закону
В настоящей лабораторной работе внешнее волновое воздействие на МСБП имитировано с помощью волнопродуктора, создающего регулярное волнение, изменяющееся практически по гармоническому закону с круговой частотой ω и периодомτ=2π/ω.
Из
теории колебаний [5] известно, что величина
амплитуды Uачастного
решения (8) зависит от соотношения частот
собственныхΩи вынужденныхωколебаний. С достаточной степенью
точности ее можно определить какUа
- UcrkД,где kД
-коэффициент динамичности,
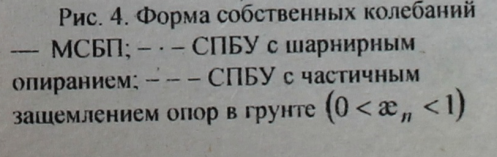
определяемый по формуле: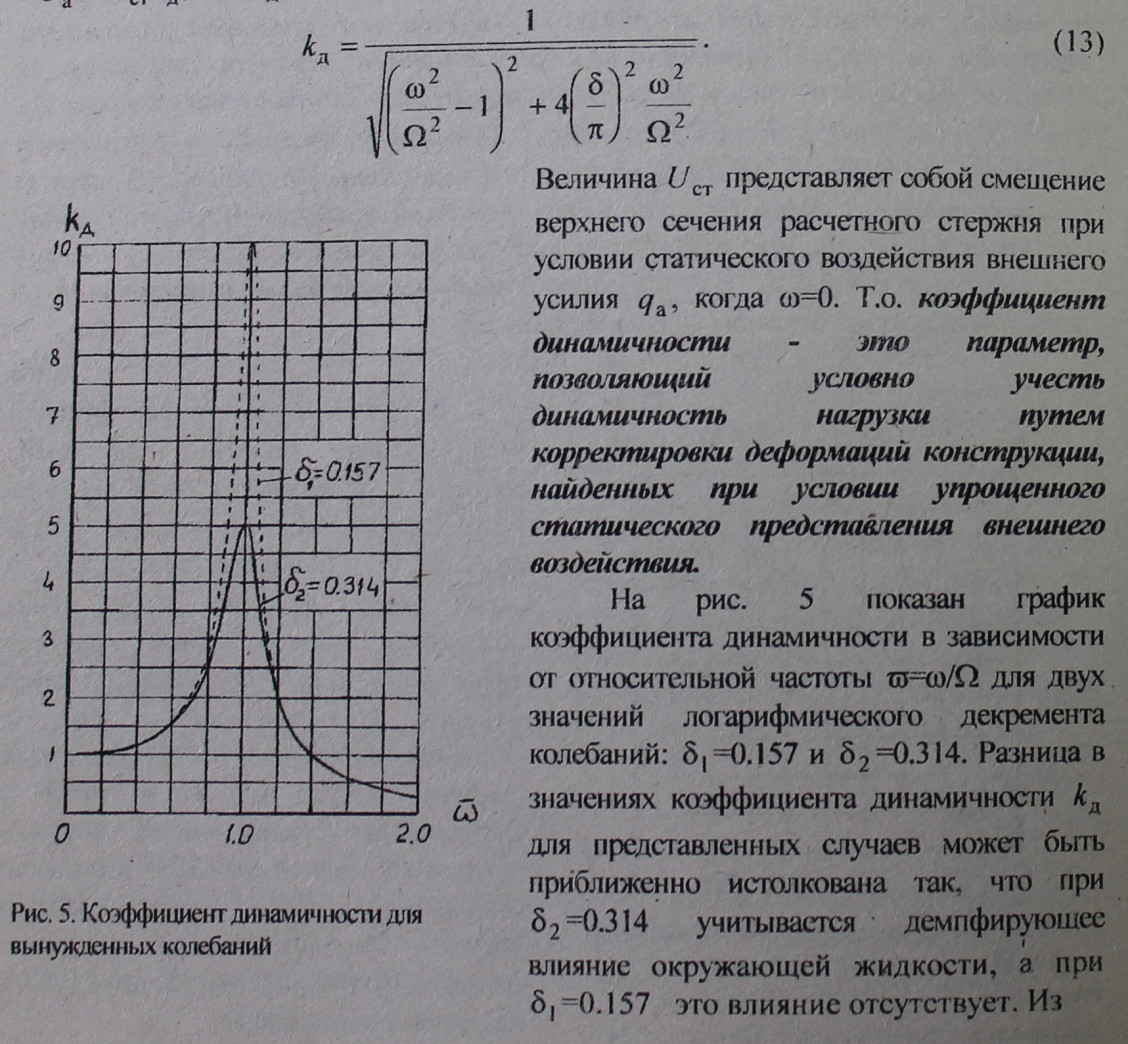
формулы (13) следует, что при резонансе, когда частоты собственных и вынужденных колебаний совпадают (ω=Q), коэффициент динамичности равен
kд= π/2 δ, откуда δ= π/2kд..
3. Описание лабораторной установки
Физическая схема лабораторной установки показана на рис. 6,а. Она состоит из вертикального прутка сечением 25x2.5 мм и расчетной длиной L= 0.8 м. В нижней части пруток жестко защемлен в массивном основании, а в верхней части имеется площадка для дополнительных грузов. На рис 6,б показана соответствующая данной модели динамическая расчетная схема, в которой масса прутка разбивается на 5 узловых массm1, равноудаленных друг от друга на расстояние ΔL=L/5=160мм. Изменение верхней массы M1 используется для варьирования частоты собственных колебаний установкиΩ.

Рис. 6. Схема лабораторной установки а – физическая; б - расчетная
Простейшим случаем динамических расчетов МСБП является сведение пространственной задачи к рассмотрению плоской расчетной схемы, где все усилия и перемещения сооружения рассматриваются лежащими лишь в одной плоскости. Для того, чтобы колебания модели происходили по возможности также в одной плоскости, профиль вертикального стержня выбран гак, чтобы его жесткости в разных плоскостях во много раз отличались друг от друга. Из-за этого поперечное сечение стержня модели не является характерным для конструкций МСБП. Поэтому изучение влияния окружающей жидкости проводится лишь качественно, т.е. нахождение конкретных величин коэффициентов присоединенных масс и демпфирования с помощью данной установки не предусмотрено.
Опыты с моделью проводятся в 3 этапа, которые показаны на рис. 7. На первом этапе (рис. 7,а) модель испытывается вне окружающей жидкости и определяются такие динамические характеристики, как собственная частота Ωи декремент колебанийδв воздухе. На втором этапе (рис. 7,6) установка помещается в неподвижную воду и те же характеристики определяются при условии влияния окружающей жидкости. На третьем этапе (рис. 7,в) модель подвергается воздействию регулярного волнения, создаваемого волнопродуктором. Это позволяет исследовать динамический характер взаимодействия МСБП с волновым процессом.

Основной инерционной характеристикой модели является ее обобщенная масса в воздухе (вне влияния жидкости) А/*в, которая может быть вычислена по общей формуле (5) при условии разбиения расчетной длины стержня на 5 равных частей (см. рис 6,6). Сучетом массы подставки для грузов, равной 0.480 кг и равенстве каждой узловой массы 0.110 кг конкретная расчетная зависимость приобретает вид
M*ОВ = 0,480 + 0,110 Σ5i=1Ф2i, кг. (15)
Значения функции формы собственных колебаний Ф предварительно снимаются с графика на рис. 4 (сплошная линия) и заносятся в табл. 1.
|
Безразмерная координата ξ |
0,1 |
0,3 |
0,5 |
0,7 |
0,9 |
|
Функция формы колебаний Ф |
|
|
|
|
|