

1. Цель работы
Ознакомление студентов с физической природой динамического взаимодействия морских стационарных сооружений с встро-волновыми воздействиями, с теоретическими основами расчета динамичности воздействия регулярного волнения, а также ознакомление с методикой постановки эксперимента по определению основных динамических характеристик морских буровых платформ, предназначенных для освоения континентального шельфа.
2. Краткие сведения из теории
Морские стационарные буровые платформы (МСБП) предназначены для длительной эксплуатации в условиях открытого моря и поэтому подвержены воздействию самых экстремальных штормов и ураганов. Будучи прочно скрепленными с грунтом морского дна, они не могут сойти с точки работ в море и укрыться даже при приближении самых жестоких ураганов, так как это могут сделать суда и другие плавсредства. Их единственная возможность "выжить" во время шторма состоит в наличии достаточных запасов прочности и устойчивости, поэтому необходимость динамических расчетов, т.е. расчетов, учитывающих динамический характер воздействия волнения и ветра, для таких сооружений особенно велика.
Отчасти в сходных условиях находятся самоподъемные плавучие буровые установки (СПБУ), которые хотя и имеют возможность перемещения с одной точки работ в море на другую, но их перестановки производятся только в спокойную погоду и занимают длительное время.
МСБП и СПБУ (см. рис.1,а ), как правило, имеют вытянутую в высоту геометрическую форму и регулярно повторяющуюся конструкцию опорных блоков или колонн. Поэтому для них может быть предложена динамическая расчетная схема, показанная на рис. 1,б. Установка рассматривается как вертикальный упругий невесомый стержень длиной L с жесткостью при изгибе KEJ (К - число опорных колонн или блоков; Е - модуль упругости; J - момент инерции площади поперечного сечения одной опоры). Инерционные характеристики сооружения учитываются равноотстоящими друг от друга на расстоянии ΔL сосредоточенными узловыми массами m1, индекс i=1 соответствует верхнему сечению, где сосредоточена масса верхнего строения, индекс i=n нижнему сечению на уровне дна моря (грунта). На рис. 1,в показаны динамические перемещения (колебания) (U1 расчетного стержня.
На рис. 1,б также обозначено: у - текущая продольная координата, измеряемая от нижнего сечения стержня; ql - узловые нагрузки, учитывающие внешние динамические воздействия: волнение (профиль волны ƞ), ветер (эпюра скорости W) и т.п.
Для максимально более точного описания условий деформаций опор на концах расчетного стержня задаются граничные условия:

Рис.
1. Динамическая расчетная схема: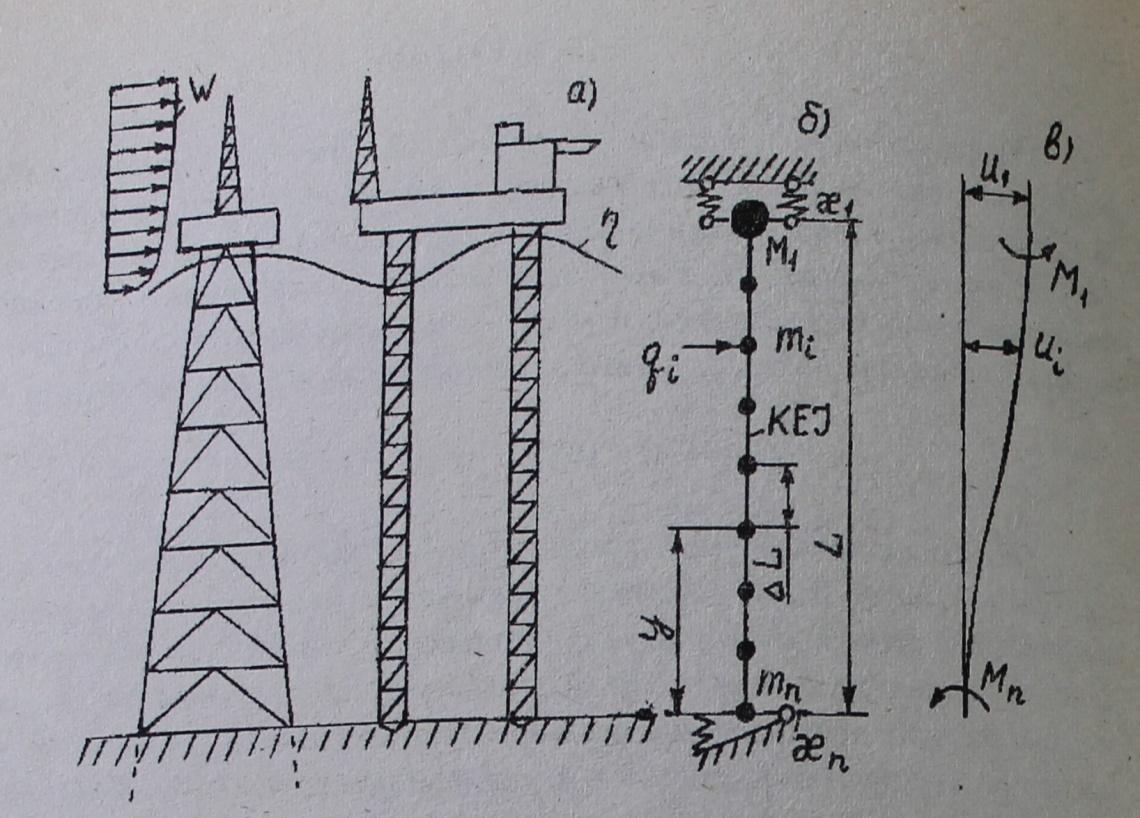
А- мсбп и спбу; б- расчетный стержень; в -перемещения
на нижнем конце, где горизонтальные смещения отсутствуют, они задаются с помощью неподвижной опоры, имеющей упругую заделку с коэффициентам защемления х„.Это позволяет учесть опорный моментМп,создаваемый грунтом. Для МСБП на свайном основании коэффициент эе„ приближается к 1, т.е. опорный блок внизу практически полностью защемлен; для СПБУ, в случае, если ее опоры просто свободно опираются на фунт, как опорный моментМп,так и коэффициент эе„ равны 0);
у верхнего конца стержня существуют поперечно-горизонтальные перемещения (колебания) (/, поэтому граничные условия заданы подвижной опорой с коэффициентом защемления верхнего конца aet.Это позволяет учесть возможную упругую заделку верхнего сечения. Так, например, для МСБП, у которых верхнее строение имеет довольно гибкий рабочий настил, изгибающий моментМ\, воздействующий на опорный блок, невелик и этот коэффициентаг(близок к 0. И наоборот, у СПБУ, имеющих мощный и жесткий понтон, изгибающий момент Л/, весьма значителен и коэффициент хЛприближается к 1, что соответствует практически жесткому защемлению верхних сечений опорных колонн в понтоне. Таким образом, расчетная схема и граничные условия СПБУ как бы «перевернуты верх ногами» по отношению к МСБП.
В строительной механике корабля (и механике строительных сооружений) показано, что система дифференциальных уравнений, определяющих процесс колебаний для выбранной расчетной схемы, в матричной форме может быть записана в виде:
[M]{ Ü (t)}+p[C]{Ú(t)}+[K]{U(t)}={q(t)}, (1)
где {Ü(t)}; {Ú(t)} и {U(t)}- соответственно векторы ускорений, скоростей и
перемещений узловых точек iрасчетного стержня; [М] - диагональная матрица масс, формируемая из узловых массm1, m2, m3в которые входят как массы конструкции сооружения, так и присоединенные массы жидкостиμ;
[С] - матрица коэффициентов демпфирования колебаний, которые включают пропорциональные скоростям {{/(/)} усилия рассеивания энергии колебаний от конструкционного внутреннего трения и гидродинамического демпфирования окружающей жидкости;
[K] -матрица жесткости (каждый коэффициент этой матрицы kitравен силе сопротивления, приложенной к массе mtпри единичном перемещении массы т,и неподвижности всех остальных); {q{t)\ -вектор внешних динамических нагрузок, приведенных к узловым массам.
Для решения дифференциальных уравнений (1)вводятся* новые переменные {x(t)} (так называемые обобщенные координаты), с помощью которых перемещения узловых точек конструкции могут быть записаны в виде:
U(t)= x1(t)Ф1 + x2(t)Ф2 + xn(t)Фn = Σnj=1 xj (t)Фj = [Ф]{x(t)}, (2)
где [Ф] - квадратная матрица n - го порядка, включающая в себя базисные векторыj-ых главных форм колебаний конструкции.
Использование этих новых переменных приводит к тому, что система взаимосвязанных дифференциальных уравнений (1) распадается на nнезависимых уравнений, каждое из которых определяет отдельные, происходящие независимо друг от друга колебания конструкции поy-му тону, и имеет следующий вид:
ẍj (t) + 2ξj Ωj ẋj (t) + Ωjxj (t) = Q*j(t)/M*j, (3)
куда входят следующие обобщенные коэффициенты:
δ [Ф]T[Cг][Ф]
ξj = π + 2M*j Ωj
- обобщенный коэффициент демпфирования колебаний;
δ- логарифмический декремент свободных колебаний;
Ωj- частота собственных колебаний конструкции поj-му тону;
M*j =[Ф]T[Cг][Ф] – обобщенная масса j-го тона;
Q*j(t) = [Ф]{q(t)} – обобщенная внешняя сила j-го тона;
Индексы "т" здесь означают транспонированную матрицу, а "г" – гидродинамическое демпфирование (гашение) колебаний со стороны жидкости.
Многочисленные эксперименты и натурные наблюдения показывают, что наиболее существенные колебания, которые испытывают МСБП от воздействия волнения и ветра, происходят по первому (основному) тону колебаний т.е. j=1. Поэтому в дальнейшем ограничимся рассмотрением только самого первого из уравнений(3), причем индексj=1 будем для простоты опускать, т.е.
ẍ (t)+2ξΩẋ(t) + Ωx(t) = Q* (t)/M * (4)
В этом уравнении обобщенная масса
M* Σni=1 miФ2i, (5)
величины Q* (t)= Σni=1 qi(t)Ф; [Ф]T[CГ][Ф]= Σ Cг, Ф2i;
индекс iсоответствует номеру узловой точки.
После нахождения обобщенной переменной x(t), перемещения узловых точек расчетного стержня могут быть найдены как
Ui(t)=Фix(t) (6)
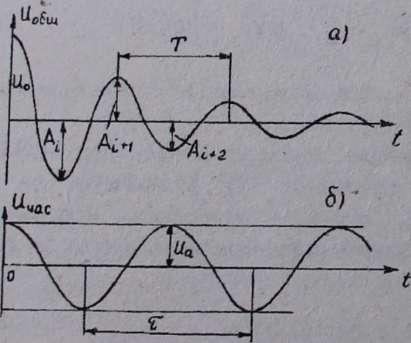
Рис. 2. Колебания МСБП: а - свободные затухания; б - вынужденные
Как будет показано ниже (см. п.2.5), для верхнего сечения (узловая точка i=1 на рис 1,6) значения функции формы колебаний равно 1. Поэтому перемещения верхнего строения и обобщенная координата совпадают, т.е.U1(t)=x(t)
В простейшем случае, когда внешнее воздействие задано силой, изменяющейся по гармоническому закону q(t) = qa cos(ωt), где qa - амплитудное значение усилия, аω- его круговая частота; решение дифференциального уравнения(4)'ищется как сумма общего и частного решений:U = Uo6щ + Uчac:
Uo6щ(t)=Uoe-(δΩ/π)*icos(Ωt+φ1), (7)
Uчас(t)=Ua cos(Ωt+φ2), (8)
где φ1иφ2- некоторые углы фазового сдвига.
На рис 2. показаны законы изменения общего (свободные затухающие колебания (Uо6щ) и. частного (вынужденные колебанияUчас) решений при отсутствии углов фазового сдвига (современные динамические расчеты рассматривают ветро-волновые воздействия, как нерегулярные случайные процессы и углы фазового сдвига вообще не рассматривают)). Здесь также обозначено:T=2π/Ω- период свободных колебаний;τ=2π/ω- период вынужденных колебаний.
Следует отметить, что. строго говоря, частоты собственных и свободных затухающих колебаний несколько отличаются друг orдруга. Частоты собственных колебаний получается путем решения уравнения частот (в матричной форме вида
[K–Ω2M]и определяются без учета сил сопротивления. Параметры свободных затухающих колебаний, в свою очередь, уже зависят от демпфирования. Однако при сравнительно небольшом уровне рассеивания энергии колебаний это отличие пренебрежимо мало. Поэтому термины «частоты собственных и свободных колебаний» в дальнейшем будут смешиваться.
Параметры Ω, Ф иδявляются важнейшими динамическими характеристиками МСБП, от правильности определения которых существенно зависит точность всего расчета прочности. Рассмотрим подробнее простейшие теоретические и экспериментальные методы их определения главным образом для случая жестко защемленной в фунте МСБП, поскольку он наиболее полно совпадает с конструкцией лабораторной установки.