

1.1.2. Свободные колебания систем с одной степенью свободы. Комплексная форма представления гармонических колебаний
В природе очень распространены малые колебания, которые система совершает вблизи своего положения равновесия. Если система, выведенная из положения равновесия, предоставлена себе, то есть на неё не действуют внешние силы, то такая система будет совершать свободные незатухающие колебания. Рассмотрим систему с одной степенью свободы.
Устойчивому
равновесию соответствует такое положение
системы, в котором её потенциальная
энергия
![]() имеет минимум (q–
обобщённая координата системы). Отклонение
системы от положения равновесия приводит
к возникновению силы
имеет минимум (q–
обобщённая координата системы). Отклонение
системы от положения равновесия приводит
к возникновению силы![]() ,
которая стремится вернуть систему
обратно. Значение обобщённой координаты,
соответствующей положению равновесия,
обозначим
,
которая стремится вернуть систему
обратно. Значение обобщённой координаты,
соответствующей положению равновесия,
обозначим![]() ,
тогда отклонение от положения равновесия
,
тогда отклонение от положения равновесия![]()
Будем
отсчитывать потенциальную энергию от
минимального значения
![]() .
Примем
.
Примем![]() Полученную
функцию
Полученную
функцию![]() разложим в ряд Маклорена и оставим
первый член разложения, имеем: о
разложим в ряд Маклорена и оставим
первый член разложения, имеем: о
![]() ,
,
где
![]() .
Тогда с учётом введённых обозначений:
.
Тогда с учётом введённых обозначений:
![]() ,
(1.1.4)
,
(1.1.4)
С учётом выражения (1.1.4) для силы, действующей на систему, получаем:
![]()
Согласно
второму закону Ньютона, уравнение
движения системы имеет вид:
![]() ,
,
тогда
![]() ,
(1.1.5)
,
(1.1.5)
Выражений (1.1.5) совпадает с уравнением (1.1.3) свободных гармонических колебаний при условии, что
![]() ,
(1.1.6)
,
(1.1.6)
и
имеет два независимых решения:
![]() и
и![]() ,
так что общее решение:
,
так что общее решение:
![]() ,
или
,
или
![]() ,
,
где![]()
Из формулы (1.1.6) следует, что частота определяется только собственными свойствами механической системы и не зависит от амплитуды и от начальных условий движения.
Зависимость
координаты колеблющейся системы от
времени можно определить в виде
вещественной части комплексного
выражения ![]() ,
гдеA=Xe-iα– комплексная амплитуда, её модуль
совпадает с обычной амплитудой, а
аргумент – с начальной фазой.
,
гдеA=Xe-iα– комплексная амплитуда, её модуль
совпадает с обычной амплитудой, а
аргумент – с начальной фазой.
1.1.3. Примеры колебательных движений различной физической природы
1.1.3.1. Колебания груза на пружине
Рассмотрим колебания груза на пружине, при условии, что пружина не деформирована за пределы упругости. Покажем, что такой груз будет совершать гармонические колебания относительно положения равновесия (рис.1.1.3). Действительно, согласно закону Гука, сжатая или растянутая пружина создаёт гармоническую силу:
![]()
Где – коэффициент жёсткости пружины, – координата положения равновесия, х – координата груза (материальной точки) в момент времени ,- смещение от положения равновесия.
Поместим начало
отсчета координаты в положение равновесия
системы. В этом случае
![]() .
.
Е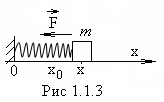 сли
пружину растянуть на величинух,
после чего отпустить в момент времениt=0, то уравнение
движения груза согласно второму закону
Ньютона примет вид-kx
=ma, или
сли
пружину растянуть на величинух,
после чего отпустить в момент времениt=0, то уравнение
движения груза согласно второму закону
Ньютона примет вид-kx
=ma, или
![]() ,
и
,
и
![]() (1.1.6)
(1.1.6)
Это уравнение совпадает по виду с уравнением движения (1.1.3) системы, совершающей гармонические колебания, его решение будем искать в виде:
![]() .
(1.1.7)
.
(1.1.7)
Подставим
(1.17) в (1.1.6), имеем:
![]() то есть выражение (1.1.7) является
решением уравнения (1.1.6) при условии,
что
то есть выражение (1.1.7) является
решением уравнения (1.1.6) при условии,
что
![]()
Если в начальный момент времени положение груза было произвольным, то уравнение движения примет вид:
![]() .
.
Рассмотрим,
как меняется энергия груза, совершающего
гармонические колебания в отсутствие
внешних сил (рис.1.14). Если
в момент времени t=0
грузу сообщить смещение х=А,
то его полная энергия станет равной
потенциальной энергии деформированной
пружины
![]() ,
кинетическая энергия равна нулю (точка
1).
,
кинетическая энергия равна нулю (точка
1).
Н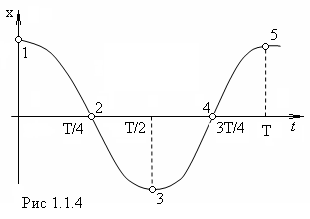 а
груз действует силаF=
-kx, стремящаяся
вернуть его в положение равновесия,
поэтому груз движется с ускорением и
увеличивает свою скорость, а, следовательно,
и кинетическую энергию. Эта сила сокращает
смещение грузах,потенциальная
энергия груза убывает, переходя в
кинетическую. Система «груз - пружина»
замкнутая, поэтому её полная энергия
сохраняется, то есть:
а
груз действует силаF=
-kx, стремящаяся
вернуть его в положение равновесия,
поэтому груз движется с ускорением и
увеличивает свою скорость, а, следовательно,
и кинетическую энергию. Эта сила сокращает
смещение грузах,потенциальная
энергия груза убывает, переходя в
кинетическую. Система «груз - пружина»
замкнутая, поэтому её полная энергия
сохраняется, то есть:
![]() .(1.1.8)
.(1.1.8)
В момент времени
![]() груз находится в положении равновесия
(точка 2), его потенциальная энергия
равна нулю, а кинетическая максимальна
груз находится в положении равновесия
(точка 2), его потенциальная энергия
равна нулю, а кинетическая максимальна![]() .
Максимальную скорость груза найдём из
закона сохранения энергии (1.1.8):
.
Максимальную скорость груза найдём из
закона сохранения энергии (1.1.8):
![]()
За счёт запаса
кинетической энергии груз совершает
работу против упругой силы –![]() и пролетает положение равновесия.
Кинетическая энергия постепенно
переходит в потенциальную. При
и пролетает положение равновесия.
Кинетическая энергия постепенно
переходит в потенциальную. При![]() груз имеет максимальное отрицательное
смещение –А,кинетическая энергияWk=0, груз останавливается и начинает
движение к положению равновесия под
действием упругой силыF=
-kx. Далее движение
происходит аналогично.
груз имеет максимальное отрицательное
смещение –А,кинетическая энергияWk=0, груз останавливается и начинает
движение к положению равновесия под
действием упругой силыF=
-kx. Далее движение
происходит аналогично.