

2.7. Преобразования Галилея. Принцип относительности Галилея.
Р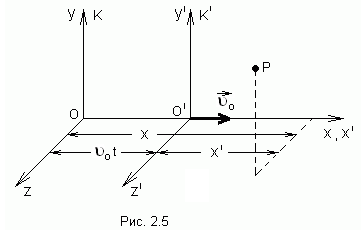 ассмотрим
две системы отсчета,
движущиеся друг относительно друга с
постоянной скоростью
ассмотрим
две системы отсчета,
движущиеся друг относительно друга с
постоянной скоростью
![]() .
(рис.2.5)
.
(рис.2.5)
Обозначим
системы: 1-ю систему, буквой
![]() и
будем условно считатьнеподвижной.
Тогда
вторая система
и
будем условно считатьнеподвижной.
Тогда
вторая система
![]() будетдвигаться
прямолинейно и равномерно.
будетдвигаться
прямолинейно и равномерно.
Выберем
координатные оси
![]() системы
системы
![]() и оси
и оси
![]() системы
системы
![]() так, чтобы оси
так, чтобы оси
![]() и
и
![]() совпадали, а оси
совпадали, а оси
![]() и
и
![]() ,
а также
,
а также
![]() и
и
![]() были параллельны друг другу.
были параллельны друг другу.
Найдем связь
между координатами
![]() некоторой точки
некоторой точки
![]() в системе
в системе
![]() и координатами
и координатами
![]() той
же точки в системе
той
же точки в системе
![]() .
Если начать отсчет времени с того
момента, когда начала координат обеих
систем совпадали, то, как следует из
рис.2. 5,
.
Если начать отсчет времени с того
момента, когда начала координат обеих
систем совпадали, то, как следует из
рис.2. 5,
![]() ,
,
![]() .
.
В классической
механике считается, что время в обеих
системах течет одинаковым образом,
![]() .
.
Тогда получаем совокупность четырех уравнений, называемых преобразованиями Галилея:
![]() ,
,
![]() ,
,![]() .
(2.14)
.
(2.14)
Найдем связь
между скоростями точки
![]() по отношению к системам отсчета
по отношению к системам отсчета
![]() и
и![]() ,
продифференцировав выражения (2.14) по
времени,
,
продифференцировав выражения (2.14) по
времени,
![]() .
(2.15)
.
(2.15)
В векторной форме:
![]() .
(2.16)
.
(2.16)
Формулы (2.15) и (2.16) выражают правило сложения скоростей в классической механике. При этом следует помнить,
- выражения (2.15) справедливы лишь в случае выбора осей, показанных на рис.2.5.
- выражение (2.16) справедливо при любом выборе осей.
Продифференцировав (2.16) по времени, получаем:
![]() (2.17)
(2.17)
- ускорение тела во всех инерциальных системах отсчета одинаково.
Это означает, что и силы, действующие на тело в инерциальных системах отсчета одинаковы. Следовательно, уравнения динамики не изменяются при переходе от одной инерциальной системы отсчета к другой, т.е. инвариантны к преобразованиям Галилея.
С механической точки зрения все инерциальные системы отсчета совершенно эквивалентны, ни одной из них нельзя отдать предпочтение перед другими. Это означает, что никакими механическими опытами, проведенными в пределах данной системы отсчета, нельзя установить, находится ли она в состоянии покоя или движется прямолинейно и равномерно. Эти положения носят название принципа относительности Галилея.
2.8. Силы.
В современной физике различают четыре вида взаимодействий:
гравитационное (вызванное всемирным тяготением),
электромагнитное (осуществляемое через электрические и магнитные поля),
сильное или ядерное (обеспечивающее связь частиц в атомном ядре)
слабое (проявляющееся при распаде элементарных частиц).
В классической механике имеют дело с гравитационными и электромагнитными силами, а также с упругими и силами трения. Два последних вида сил определяются характером взаимодействия между молекулами вещества и имеют электромагнитное происхождение.
Гравитационные и электромагнитные силы являются фундаментальными, их нельзя свести к другим, более простым силам.
Упругие силы и силы трения не являются фундаментальными.
2.9. Упругие силы.
Упругая сила – сила пропорциональная смещению материальной точки из положения равновесия и направленная к положению равновесия.
Всякое реальное тело под действием приложенных к нему сил деформируется, т.е.изменяет свои размеры и форму.
Если после прекращения действия сил тело принимает первоначальные размеры и форму, деформация называется упругой.
Примеры:
а) Упругие деформации наблюдаются в том случае, если сила, обусловившая деформацию, не превосходит некоторый предел, называемый пределом упругости.
б) Если после прекращения действия сил форма и размеры тела не восстанавливаются, говорят о неупругой деформации.
Р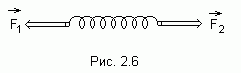 ассмотрим
пружину,
(рис.2.6), имеющую в недеформированном
состоянии длину
ассмотрим
пружину,
(рис.2.6), имеющую в недеформированном
состоянии длину
![]() ,
и приложим к ее концам равные по величине,
противоположно
направленные силы
,
и приложим к ее концам равные по величине,
противоположно
направленные силы
![]() и
и![]()
а) Под действием
этих сил пружина
растянется
на некоторую величину
![]() ,
после чего наступит равновесие.
,
после чего наступит равновесие.
В состоянии
равновесия
внешние силы![]() и
и
![]() будут уравновешены упругими силами,
возникшими в пружине в результате
деформации.
будут уравновешены упругими силами,
возникшими в пружине в результате
деформации.
При небольших
деформациях удлинение пружины
![]() оказывается пропорциональным растягивающей
силе:
оказывается пропорциональным растягивающей
силе:
![]() (2.18)
(2.18)
- это закон Гука.
Здесь
![]() -
коэффициент жесткости пружины.
-
коэффициент жесткости пружины.
Упругие натяжения возникают во всей пружине. Любая часть пружины действует на другую часть с силой, определяемой формулой (2.18). Поэтому, если разрезать пружину пополам, та же по величине упругая сила будет возникать в каждой из половин при в два раза меньшем удлинении.
Таким образом, при
заданных: материале пружины и размерах
витка, величина
упругой силы определяется не абсолютным
удлинением пружины
![]() ,
а относительным удлинением
,
а относительным удлинением
![]()
б )
При сжатии пружины
также возникают упругие натяжения, но
другого знака.
)
При сжатии пружины
также возникают упругие натяжения, но
другого знака.
Обобщим формулу (2.18) следующим образом.
Закрепим один
конец пружины неподвижно (рис.2.7), а
удлинение пружины будем рассматривать
как координату
![]() другого конца, отсчитываемую от его
положения, отвечающего недеформированной
пружине.
другого конца, отсчитываемую от его
положения, отвечающего недеформированной
пружине.
Под
![]() будем понимать проекцию на ось
будем понимать проекцию на ось![]() упругой
силы
упругой
силы![]() .
Тогда можно записать:
.
Тогда можно записать:
![]() .
(2.19)
.
(2.19)
Из рис.2.7 видно,
что проекция упругой силы на ось
![]() и координата
и координата![]() всегда имеют разные знаки.
всегда имеют разные знаки.
2 )
Однородные стержни
ведут
себя
при растяжении или одностороннем сжатии
подобно
пружине.
(рис.2.8).
)
Однородные стержни
ведут
себя
при растяжении или одностороннем сжатии
подобно
пружине.
(рис.2.8).
Если к концам
стержня приложить направленные вдоль
его оси силы
![]() и
и
![]()
![]() ,
действие которых равномерно распределено
по всему сечению,
,
действие которых равномерно распределено
по всему сечению,
то длина стержня
![]() получит положительное ( при растяжении)
или отрицательное (при сжатии) приращение
получит положительное ( при растяжении)
или отрицательное (при сжатии) приращение![]()
Деформация
стержня характеризуется относительным
изменением длины:
![]()
Экспериментально доказано, что для стержней из данного материала относительное удлинение при упругой деформации пропорционально силе, приходящейся на единицу площади поперечного сечения стержня:
![]() .
(2.20)
.
(2.20)
Коэффициент пропорциональности называется коэффициентом упругой податливости.
Величина, равная отношению силы к площади поверхности, на которую действует сила, называется напряжением.
В результате взаимодействия частей тела друг с другом напряжение передается во все точки тела и весь объем стержня оказывается в напряженном состоянии.
Если сила направлена:
- по нормали к поверхности, напряжение называется нормальным и обозначается .
- по касательной
к поверхности,
возникает тангенциальное
напряжение
![]() .
.
В выражении (2.20)
![]() ,
поэтому
,
поэтому![]() .
.
Величина,
обратная упругой податливости,
называется модулем
Юнга
![]()
С учетом сказанного,
![]() .
.
Модуль Юнга равен такому нормальному напряжению, при котором относительное удлинение было бы равно единице.
Решив записанные уравнения относительно F получаем: закон Гука для стержня.
![]()