

Билет №37
.docxБИЛЕТ № 37
1. Регулирование скорости асинхронных электроприводов.
Реостатное регулирование скорости асинхронных двигателей
Реостатное
регулирование угловой скорости
асинхронных двигателей может
осуществляться различными способами»
а именно: регулировочные резисторы
могут включаться последовательно
с обмотками статора или ротора, они
могут быть симметричными, т. е. одинаковыми
во всех трех фазах, либо несимметричными.

Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, как это показано на рис. 4-6, а, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора.
При включении симметричных сопротивлений в цепи ротора изменяется значение критического скольжения.
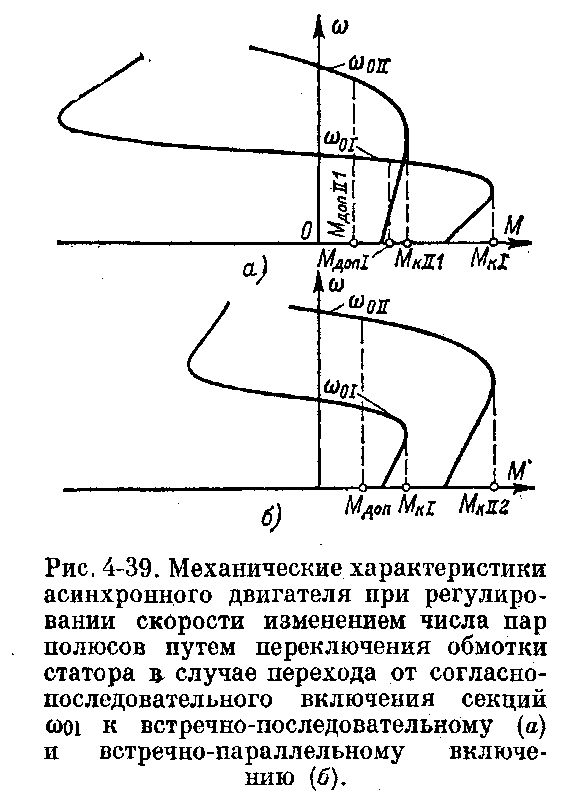
Регулирование скорости изменением числа пар полюсов
Этот
способ используется для регулирования
скорости асинхронных двигателей с
короткозамкнутым/ ротором. Его принцип
следует непосредственно из выражения
(2-47) для синхронной угловой скорости![]()
Изменение числа пар полюсов р производится путем переключения обмотки статора. При этом число пар полюсов короткозамкнутого ротора изменяется автоматически. Так как р может быть только целым числом, то данный способ обеспечивает ступенчатое регулирование скорости.Для изменения числа пар полюсов необходимо, чтобы в пазы статора были уложены независимые обмотки с различными значениями р либо при одной обмотке статора имелась бы возможность изменения ее схемы соединений. В первом случае заметно увеличиваются габариты и массы двигателей, но при этом возможно практически любое соотношение чисел пар полюсов обмоток. Как правило, такие двигатели выполняются с двумя обмотками с соотношением чисел пар полюсов от 3:1 до 12 : 1.


Рассмотренная схема тиристорного ключа может использоваться для импульсного регулирования сопротивления в цепях якоря и возбуждения, двигателей постоянного тока и в цепях асинхронных двигателей. В последнем случае добавочное сопротивление включается последовательно с обмотками статора или ротора через выпрямительный мост, как это показано на рис. 4-45. Для увеличения индуктивности коммутируемой цепи выпрямленного тока в нее включается реактор Р.
Для импульсного регулирования индуктивного сопротивления добавочное сопротивление с тиристорным или транзисторным ключом включается в цепь обмотки подмагничивания.
Следует отметить, что вследствие небольшого значения мощности, необходимой для управления тиристорным или транзисторным ключом, данный способ позволяет получить бесступенчатое плавное регулирование скорости. По этой же причине можно получить значительно более жесткие механические характеристики,, чем", например, при обычном реостатном регулировании, если с изменением нагрузки на валу двигателя изменять управляющий сигнал.
Регулирование скорости асинхронных двигателей изменением напряжения
Изменение
напряжения асинхронного двигателя
приводит к изменению критического
момента, тогда как критическое скольжение
остается постоянным. В случае ненасыщенной
магнитной цепи машины критический
момент изменяется пропорционально
квадрату напряжения.
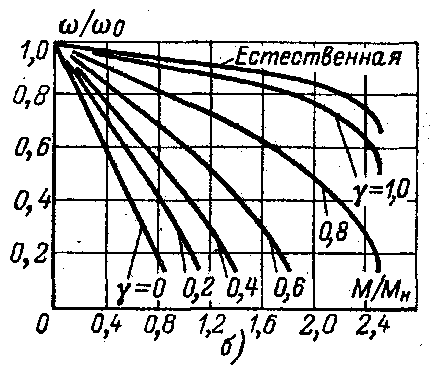
На
рис. 5-46 показаны механические характеристики
двигателя при различных напряжениях
на зажимах статора. Со снижением
напряжения уменьшается модуль жесткости
механических характеристик. Кроме
того, со снижением скорости уменьшается
допустимый момент (пунктирные линии
на рис. 5-46). В этом случае он определяется
по (4-15), равно как и при параметрических
способах регулирования, связанных с
изменением сопротивлений в цепи статора
или индуктивного сопротивления в цепи
ротора. Для увеличения допустимого
момента при пониженных скоростях в цепь
ротора двигателя вводится нерегулируемое
добавочное сопротивление. На рис.5-46,б
показаны характеристики для этого
случая.

Энергетические показатели при регулировании скорости асинхронного двигателя изменением напряжения приблизительно такие же, как и при изменении сопротивления в цепи статора. Со снижением скорости уменьшаются к, п. д. и коэффициент мощности установки.
Частотное регулирование скорости асинхронного двигателя
Применение частотного регулирования скорости значительно расширяет возможности использования асинхронных электроприводов в различных отраслях промышленности. В первую очередь это относится к установкам, где производится одновременное изменение скорости нескольких асинхронных двигателей, приводящих в движение, например, группы текстильных машин, конвейеров, рольгангов и т. п. Используется частотный принцип регулирования скорости асинхронных двигателей и в индивидуальных установках, особенно в тех случаях, когда необходимо получить от механизма высокие угловые скорости, например, для центрифуг, шлифовальных станков и т. д. Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя ; частоты ПЧ, показанного на рис. 6-1, энергия к которому ^подводится от сети постоянной частоты f1c и напряжения U1c На выходе преобразователя, как правило, меняется не только частота f1, но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу дейcтвия и конструкции.
Законы частотного управления
-
U/f = const
-
Eвн/f = const
-
C параметрической компенсацией падения сопротивления статора


3. Пояснить необходимость введения узла компенсации механических потерь при косвенном регулировании натяжения в электроприводах моталок прокатных станов.
При косвенном регулировании постоянство натяжения обеспечивается постоянством электромагнитной мощности двигателя. В этом случае система не учитывает потери в редукторе и в двигателе. В действительности электромагнитная мощность двигателя тратится на создание натяжения и на преодоление потерь в приводе. Поэтому полная статическая погрешность косвенного регулирования:
![]()
Где Tср — погрешность, определяемая статической ошибкой системы регулирования;
Tпот — погрешность, определяемая наличием потерь в приводе.
Из (13.27) следует, что чем меньше уровень потерь, тем выше точность регулирования. Если бы потери за время намотки полосы оставались неизменными, то их влияние можно было бы заранее скомпенсировать. Но этого сделать нельзя, поскольку потери не остаются постоянными, а зависят от состояния смазки, скорости прокатки, массы рулона и других факторов, не поддающихся точному учету.
При больших абсолютных значениях натяжения потребляемая мощность двигателя моталки велика относительно мощности потерь, поэтому потери не оказывают существенного влияния на точность работы системы. При малых абсолютных значениях натяжений потребляемая мощность может быть соизмерима с мощностью потерь, отсюда изменение потерь окажет существенное влияние на точность регулирования.


2. Оптимальный переходный процесс, принципы построения систем подчиненного регулирования, контур регулирования якорного тока.






