

3.4 Лабораторная работа № 6 Исследование астатических сар с последовательной коррекцией
Цель работы: Исследование и изучение динамических свойств и частотных характеристик астатических систем типа 2-1-2. Определение основных показателей качества САР с помощью программы компьютерного моделирования MATLAB.
Программы работы
Математическое моделирование
Теоретическая часть. Ознакомиться с принципом построения структурной схемы САР, определением передаточных функций, логарифмических частотных характеристик и динамических характеристик двухконтурной системы, построенной по симметричному оптимуму.
Определение параметров структурной схемы двухконтурной САР.
Создание модели двухконтурной астатической САР.
Исследование динамических свойств астатической САР с последовательной коррекцией при управляющем и возмущающем воздействиях по методу компьютерного структурного моделирования.
Аналитический расчёт переходных процессов в двухконтурных САР.
Частный анализ двухконтурной астатической САР с использованием пакета МАТLAB.
Построение асимптотических ЛАЧХ и ЛФЧХ исследуемой системы.
Расчетная и графическая часть.
Представить цель и программу работы, содержание расчетно-экспериментальной части и моделирования.
Составить структурную схему двухконтурной системы, построенной по симметричному оптимуму, определить параметры модели САР.
Представить модель двухконтурной САР, построенной по симметричному оптимуму, с фильтром на входе системы и без нее.
Представить результаты исследования по методу структурного моделирования временных характеристик статической САР при задающем и возмущающем воздействиях в виде графиков и таблиц.
Представить результаты аналитического расчета временных характеристик сравнительно с характеристиками, полученными при моделировании САР.
По результатам расчетов переходных процессов определить прямые показатели качества САР, свести их в таблицу 6.1.
Таблица 6.1. Показатели качества САР
|
САР |
Реакция на задающее воздействие |
Реакция на возмущающее воздействие | |||||||
|
|
|
|
|
|
|
|
| ||
|
Без фильтра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
С фильтром |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
C минимальным значением М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Построить частотные характеристики САР с использованием программы MATLAB.
Построить передаточные функции разомкнутой и замкнутой САР при задающем и возмущающем воздействиях.
Построить ЛАЧХ и ЛФЧХ двухконтурной САР при задающем и возмущающем воздействиях.
Сделать выводы по работе.
3. Порядок выполнения лабораторной работы.
Теоретическая часть.
Настройка системы подчинённого регулирования на модульный оптимум позволяет получить оптимальный переходный процесс с минимальным перерегулированием с максимальным быстродействием. Кроме того, указанная настройка обеспечивает астатизм системы по задающему воздействию. Однако, в таком случае возникает статическая ошибка регулирования, зависящая от внешнего возмущающего воздействия.
Для исключения этой ошибки необходимо изменить настройку системы. Обеспечить астатизм по возмущающему воздействию можно в двукратно-интегрирующей системе, настроенной по симметричному оптимуму. Передаточная функция регулятора внешнего контура в такой системе описывается выражением:
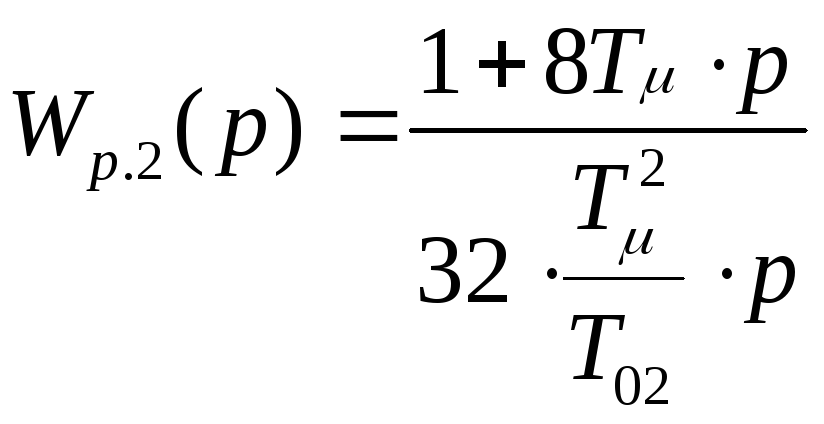 (6.1)
(6.1)
Внутренний замкнутый контур имеет такую же структуру и передаточную функцию как и в однократно-интегрирующей статической системе, настроенной по модульному оптимуму. Следовательно, внутренний замкнутый контур может быть аппроксимирован апериодическим звеном первого порядка с передаточной функцией:
![]() (6.2)
(6.2)
В этом случае структурная схема двухконтурной САР может быть представлена схемой на рисунке 6.1.
Передаточная функция разомкнутой двукратно-интегрирующей САР для выходной величины y2 при задающем воздействии имеет вид
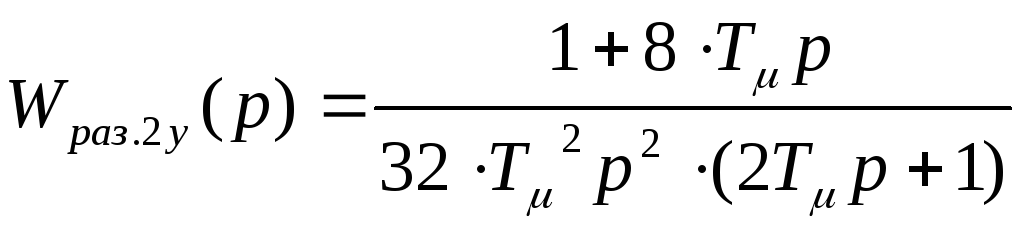 (6.3)
(6.3)
Передаточная функция замкнутой САР
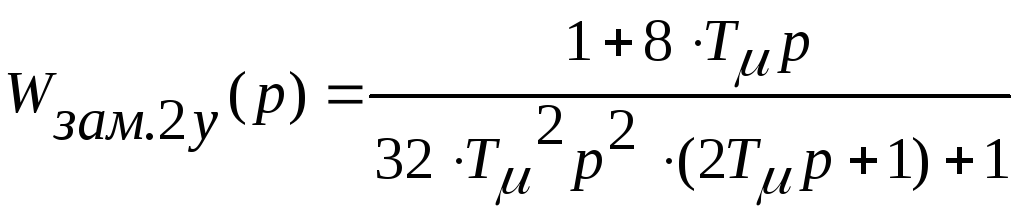 (6.4)
(6.4)
В соответствии с симметричной формой ЛАЧХ рассматриваемой системы, такой способ оптимизации получил название симметричного оптимума. При пропорционально-интегральной характеристике регулятора внешнего контура система становится двукратно-интегрирующей, обеспечивающей астатизм и по возмущающему воздействию.
Известно, что при постройке САР по симметричному оптимуму переходный процесс для выходной величины y2 при скачке задающего воздействия g=yз.2. характеризуется значительным перерегулированием, составляющим σ%=43,4%
Для улучшения динамических свойств таких систем при приложении задающего воздействия обычно на входе САР устанавливается дополнительный фильтр с передаточной функцией
![]() .
.
Структурная схема такой системы с дополнительным фильтром на входе приведена на рисунке 6.2.
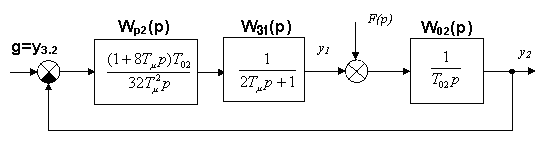
Рис. 6.1 Структурная схема системы настроенной по симметричному оптимуму без фильтра
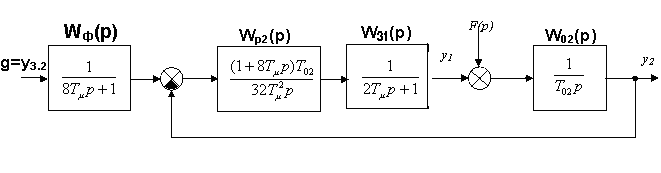
Рис. 6.2 Структурная схема системы настроенной по симметричному оптимуму с фильтром
Имеется другой вариант выбора регулятора внешнего контура, когда в системе обеспечивается минимальный показатель колебательности. В этом случае передаточная функция регулятора имеет вид
![]() .
.
Создание модели двухконтурной астатической САР с последовательной коррекцией.
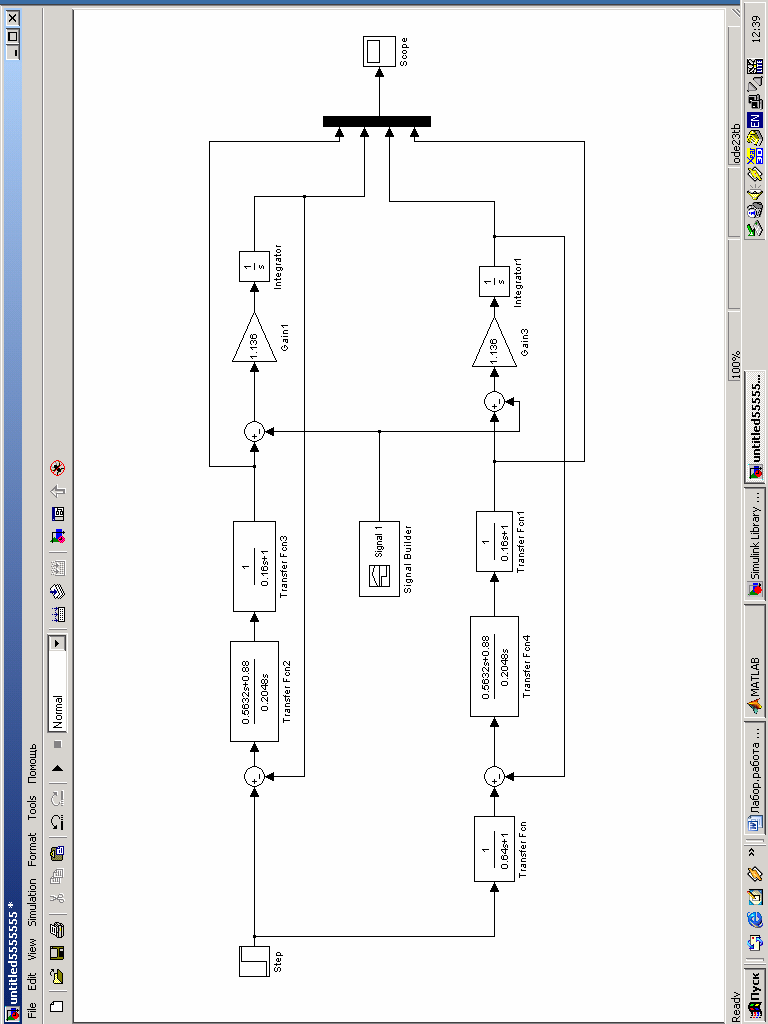
Создаются модели двухконтурной астатической САР, структурные схемы которой представлены на рис. 6.1 и 6.2. Для этого предварительно необходимо ознакомиться с общими сведениями по работе с пакетом MATLAB-Simulink и с порядком создания моделей в среде Simulink.
Параметры моделей звеньев САР устанавливаются в соответствии с параметрами структурной схемы, заданными преподавателем (см. Л.р. №4,5), либо заданным в задании на курсовую работу по ТАУ.
Представленная модель (рис.6.3) позволяет исследовать два варианта двухконтурной САР:
а) при отсутствии фильтра на входе САР;
б) при наличии фильтра на входе САР.
Расчёт переходных процессов САР по методу структурного моделирования
|
Рис 6.3 Структурная схема модели двухконтурной астатической САР |
Расчёт переходных процессов в САР при оптимальной настройке регулятора производится при задающем g=1, воздействях для выходных величин:
y1 и y2 для системы без фильтра;
y1ф и y2ф для системы с фильтром на входе САР.
В связи с тем, что фильтр не оказывает влияние на реакцию системы при возмущающем воздействии, поэтому в данном случае переходный процесс рассматривается для выходных величин y1в и y2в.
Схема модели САР в этом случае будет иметь вид, представленный на рис. 6.3
Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation/Configuration Parameters.
Для получения переходных процессов при управляющем воздействии необходимо установить конечное время равное 50Tμ (в данном примере 4 секунды)
Остальные параметры установить согласно рис. 6.4.
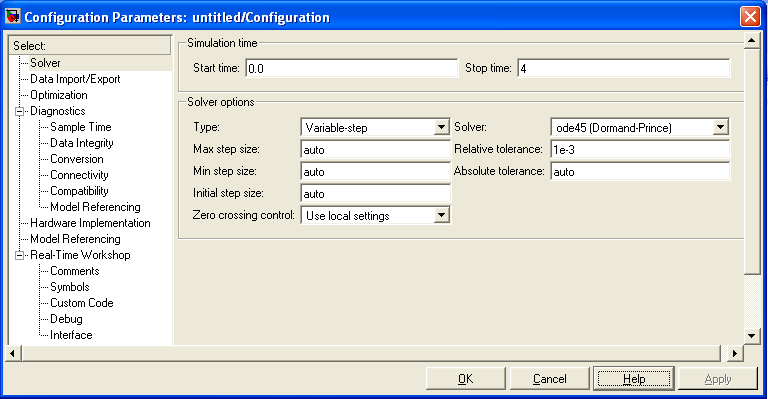
Рис 6.4 Параметры расчёта
Для формирования возмущающего воздействия используем блок Signal Builder. Время наброса нагрузки 50Tμ (в данном примере 50Tμ=4 с), конечное время 90Tμ (в данном примере 90Tμ=7,2 с), амплитуда возмущающего сигнала равна единице. С учётом всех этих параметров блок Signal Builder будет выглядеть так, как показано на рисунке 6.5.
Дважды щёлкнув по осциллографу (Scope) получаем следующие переходные функции по управляющему воздействию (Tк = 50Tμ) рис. 6.6.
Чтобы получить переходную функцию при возмущающем воздействии необходимо в меню Simulation/Configuration Parameters конечное время установить равное Tk = 90Tμ. Получаем переходные функции, представленные на рис. 6.7.
Необходимо исследовать и другой вариант настройки регулятора, обеспечивающей минимальный показатель колебательности. В этом случае передаточная функция регулятора внешнего контура имеет вид
![]() (6.5)
(6.5)
Для исследования системы с «минимальным показателем колебательности» необходимо немного изменить вышеприведённую структурную схему. После корректировки она будет иметь вид, представленный на
рис 6.8.
Дальнейший порядок действий такой же как и в предыдущем случае. Сначала необходимо снять переходные процессы при управляющем воздействии (Tк = 50Tμ), а затем при возмущающем воздействии (Tk = 90Tμ). Получим переходные процессы, представленные на рисунках 6.9 и 6.10.
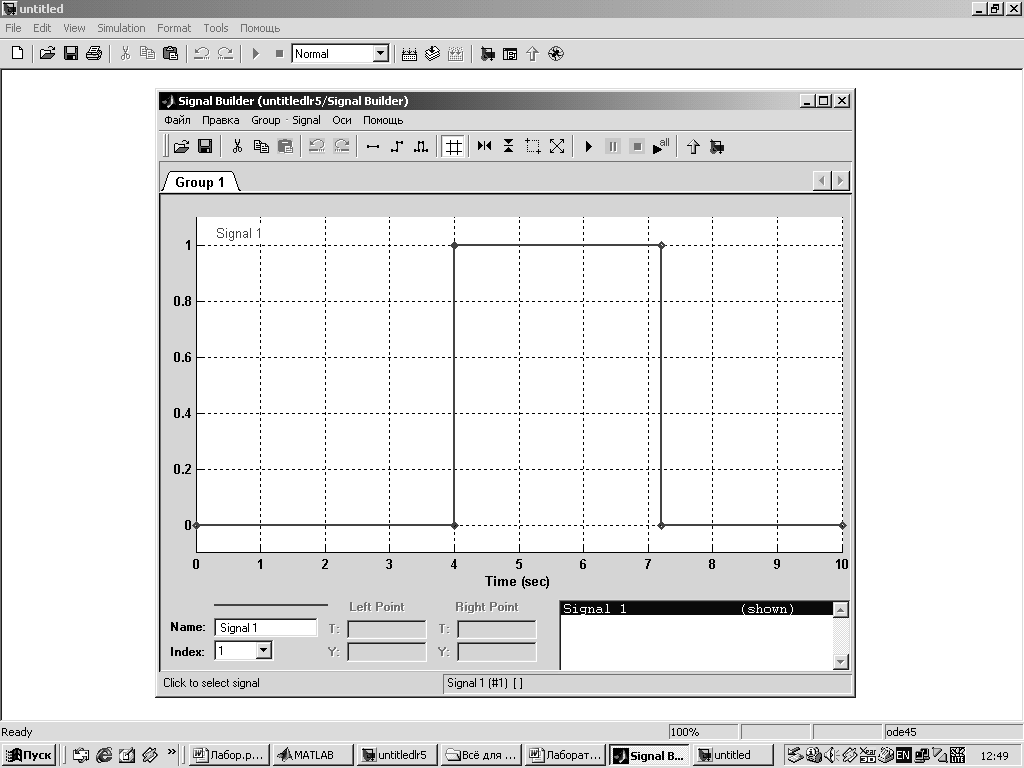
Рис. 6.5 Параметры блока Signal Builder
Аналитический расчет переходных процессов
Выражения для переходных функций могут быть получены [6] с помощью обратного преобразования Лапласа.
Переходная функция по управляющему воздействию системы, когда выходной величиной является выход внешнего контура, без фильтра имеет вид:
![]() (6.6)
(6.6)
и с фильтром:
 (6.7)
(6.7)
Переходная функция по управляющему воздействию, когда выходной величиной является выход внутреннего контура, имеет вид:
![]()
 ;
(6.8)
;
(6.8)
с фильтром:
![]()
 .
(6.9)
.
(6.9)
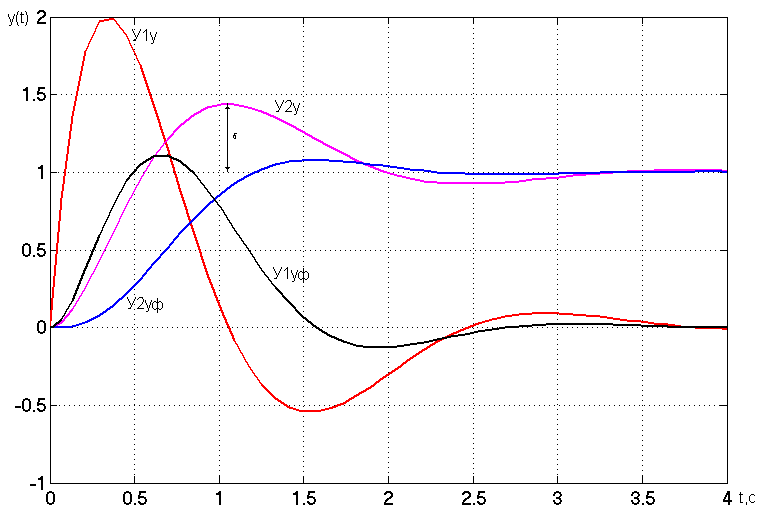
Рис. 6.6 Переходные функции при управляющем воздействии
Результаты
аналитических расчетов переходных
процессов при
![]() с.
представлены в таблице 6.1
с.
представлены в таблице 6.1
Таблица 6.1 Расчетные данные переходных процессов по управляющему воздействию
|
T |
0 |
0,4 |
0,8 |
1,2 |
1,6 |
2 |
2,4 |
2,8 |
3,2 |
3,6 |
4 |
|
y2y |
0 |
0,784 |
1,4 |
1,33 |
1,07 |
0,95 |
0,95 |
0,99 |
1,01 |
1,007 |
1,001 |
|
y2yф |
0 |
0,168 |
0,64 |
0,995 |
1,081 |
1,037 |
0,99 |
0,986 |
0,995 |
1,001 |
1,002 |
|
y1y |
0 |
2,154 |
0,464 |
-0,56 |
-0,46 |
-0,08 |
0,085 |
0,067 |
0,01 |
-0,01 |
-0,01 |
|
y1yф |
0 |
0,848 |
1,04 |
0,458 |
-0,01 |
-0,12 |
-0,05 |
0,01 |
0,021 |
0,007 |
-0,001 |

Рис. 6.7. Переходные функции при возмущающем воздействии
|
Рис. 6.8 Структурная схема для моделирования переходных процессов с «минимальным показателем колебательности»
|
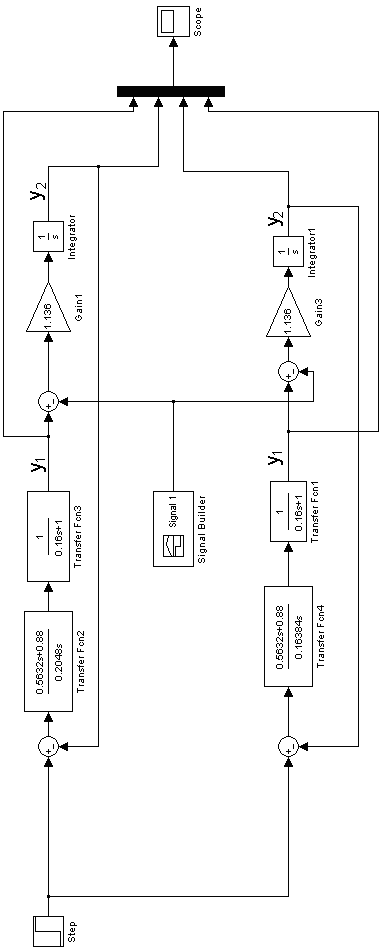
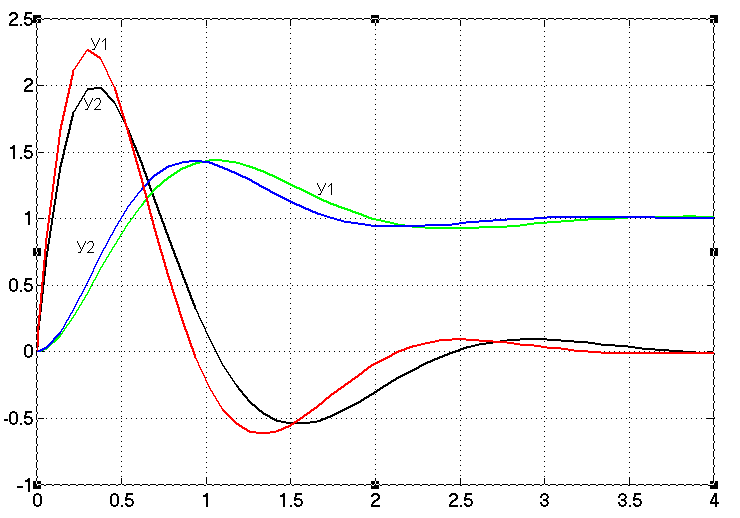
Рис. 6.9. Переходные функции при управляющем воздействии
с «меньшим показателем колебательности»
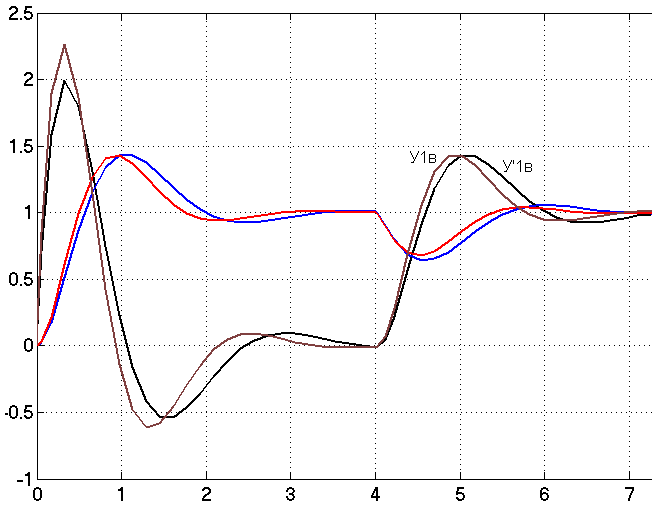
Рис. 6.10. Переходные функции при возмущающем воздействии с «меньшим показателем колебательности»

Рис. 6.11. Переходные процессы при управляющем воздействии
Передаточная функция по возмущению будет одинаковой как для системы с фильтром, так и для системы без фильтра, т.к. фильтр не влияет на систему при возмущающем воздействии. Это справедливо как для внешнего, так и для внутреннего контуров.
Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
 (6.10)
(6.10)
Переходная функция по возмущающему воздействию, когда выходной величиной является выход внешнего контура, имеет вид:
 (6.11)
(6.11)
Расчеты переходных процессов по возмущающему воздействию представлены в таблице 6.2.
Таблица 6.2 Расчеты переходных процессов по возмущающему
воздействию
|
t |
4 |
4,4 |
4,8 |
5,2 |
5,6 |
6 |
6,4 |
6,8 |
7,2 |
|
y2в |
1 |
0,69 |
0,762 |
0,945 |
1,034 |
1,031 |
1,005 |
0,994 |
1 |
|
y1в |
0 |
0,784 |
1,403 |
1,329 |
1,068 |
0,945 |
0,955 |
0,993 |
1 |
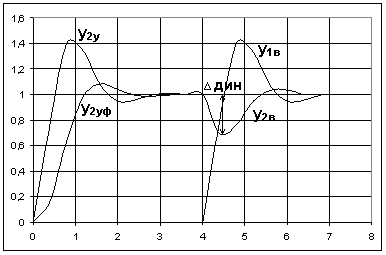
Рис. 6.12 Переходные процессы при возмущающем воздействии
Частотный анализ двухконтурной астатической САР с использованием пакета MATLAB.
Построение ЛАЧХ и ЛФЧХ разомкнутых систем САР по управляющему воздействию
Логарифмические частотные характеристики (диаграммы Боде) могут быть получены с использованием пакета MATLAB.
В соответствии с этими методами предварительно составляется передаточная функция разомкнутой САР для выходной величины y1 и y2 при задающем и возмущающем воздействиях. Для этого используются структурные схемы САР, представленные на рис. 6.1 и 6.3.
Логарифмические частотные характеристики САР при управляющем воздействии имеют следующий вид. Рассматривается пример САР со следующими исходными данными: Tμ=0.08c, T01=0.16c, T02=0.88c, Kф=9, K0=4.
Для выходной величины внешнего контура y2:
- для схемы без фильтра
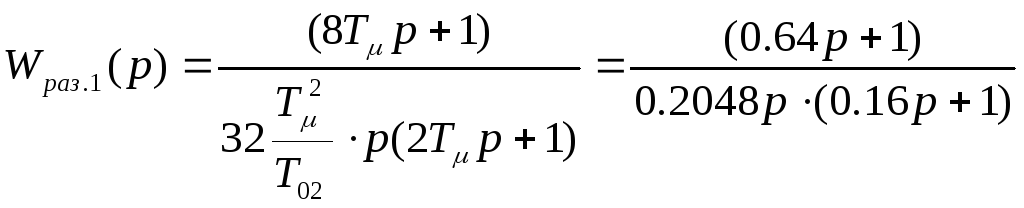
![]() (6.12)
(6.12)
- для схемы с фильтром
![]() (6.13)
(6.13)
Для выходной величины y1 внутреннего контура:
- для схемы без фильтра
 (6.14)
(6.14)
- для схемы с фильтром
![]() (6.15)
(6.15)
Расчёт логарифмических частотных характеристик с использованием пакета MATLAB производится в следующем порядке.
Для выходной величины внешнего контура создадим LTI- объект:
>> w1=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра)
Transfer function:
0.64 s + 1
-----------------------
0.0327 s^3 + 0.2048 s^2
>> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром)
Transfer function:
1
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>>bode(w1,w2)
Для выходной величины внутреннего контура создадим LTI-объект
>> w3=tf([0.5632 1],[0.0327 0.2048 0 ]) (без фильтра)
Transfer function:
0.5632 s + 1
---------------------
0.0327 s^2 + 0.2048 s
>> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром)
Transfer function:
0.88 s
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>> bode(w3,w4)
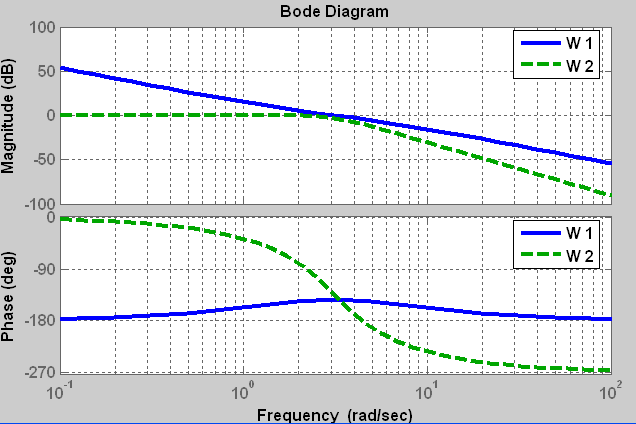
Рис. 6.13 ЛАЧХ и ЛФЧХ разомкнутых систем САР по
управляющему воздействию для внешнего контура
Для выходной величины внутреннего контура
![]() (6.16)
(6.16)
Для системы с минимальными показателями колебательности
![]() (6.17)
(6.17)
Расчёт ЛАЧХ и ЛФЧХ производится в следующем порядке.
Для выходной величины внешнего контура создадим LTI- объект
>> w2=tf([1],[0.0327 0.2048 0.64 1]) (с фильтром)
Transfer function:
1
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
>> w5=tf([1],[0.88 0]) (без фильтра)
Transfer function:
1
------
0.88 s
>> bode(w2,w5)
Рис. 6.14 ЛАЧХ и ЛФЧХ разомкнутых систем САР по
управляющему воздействию для внутреннего контура
Для выходной величины внутреннего контура создадим LTI- объект
>> w4=tf([0.88 0],[0.0327 0.2048 0.64 1 ]) (с фильтром)
Transfer function:
0.88 s
------------------------------------
0.0327 s^3 + 0.2048 s^2 + 0.64 s + 1
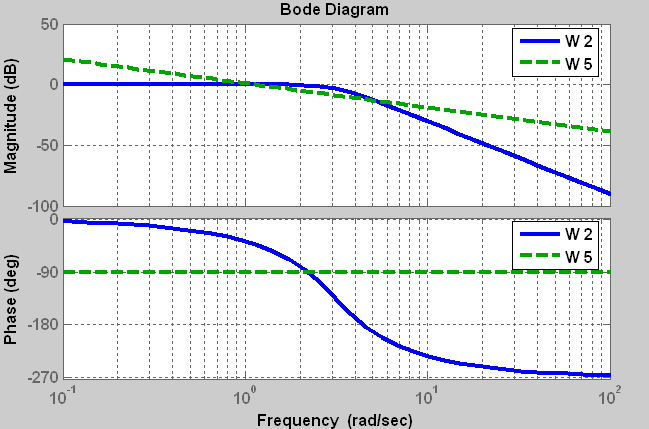
Рис. 6.15 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему
воздействию для внешнего контура
>> w6=tf([0.64 1],[0.0327 0.2048 0 0]) (без фильтра)
Transfer function:
0.64 s + 1
-----------------------
0.0327 s^3 + 0.2048 s^2
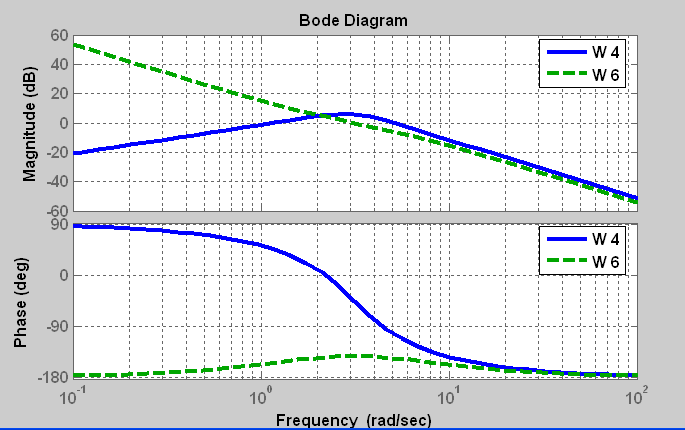
Рис. 6.16 ЛАЧХ и ЛФЧХ разомкнутой САР по возмущающему
воздействию для внутреннего контура
Для системы с минимальным показателем колебательности создадим LTI – объект
>> w7=tf([0.64 1],[0.0262 0.1638 0 0])
Transfer function:
0.64 s + 1
-----------------------
0.0262 s^3 + 0.1638 s^2
>>
Построить асимптотические ЛАЧХ и ЛФЧХ двухконтурной астатической САР, настроенной по симметричному оптимуму. Определить частотные показатели качества системы регулирования.
Определить прямые и косвенные показатели качества САР при управляющем воздействиях, при наличии и отсутствии фильтра на входе САР, при обеспечении минимального показателя колебательности.
Полученные показатели качества представить в виде таблицы 6.3
Пакет MATLAB позволяет по ЛАЧХ определить запас по фазе и запас по амплитуде, на рис. 6.18 показан пример определения запаса по фазе. Это осуществляется следующим образом после построения ЛАЧХ:
по белому полю нажать правую кнопку мыши и выбрать
Charactristics \ all stability margins
поставить галочки на против каждой строчки и получим запас по амплитуде и фазе.
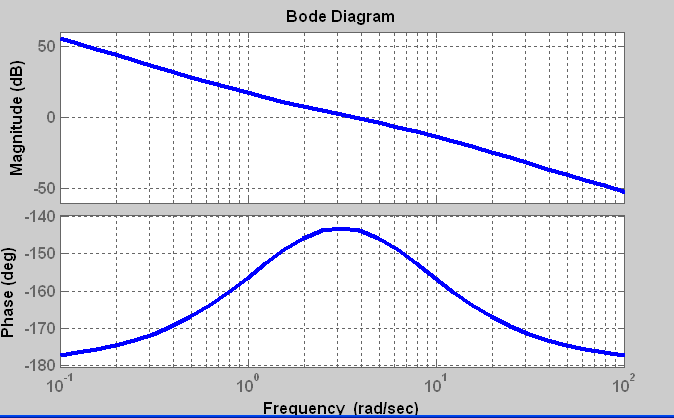
Рис. 6.17 ЛАЧХ и ЛФЧХ разомкнутой САР с минимальным
показателем колебательности
Таблица 6.3. Показатели качества асимптотической САР
|
|
Координата |
Реакция на задающее воздействие |
Реакция на возмущающее воздействие | ||||||||
|
% |
с |
|
|
|
% |
с |
|
|
| ||
|
САР без фильтра
|
y2 y1 |
|
|
|
|
|
|
|
|
|
|
|
САР с фильтром |
y2ф y1ф |
|
|
|
|
|
|
|
|
|
|
|
САР с min колебател |
y2м y1м |
|
|
|
|
|
|
|
|
|
|
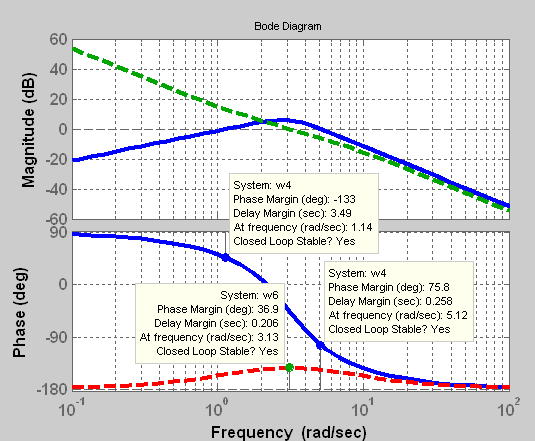
Рис. 6.18 Определение запаса по фазе
Выявить связь между прямыми показателями качества и частотными характеристиками.
Сделать выводы по работе.