

Mathcad - Var9
.pdfСтруктурный и кинематический анализ рычажного механизма
1. Исходные данные
lAB 0.1 |
м |
ω1 15 |
рад/с |
||||
l |
BC |
0.3 |
м |
ε |
1 |
10 |
рад/с2 |
|
|
|
|
|
|
||
lBS2 0.2 |
м |
xA 0 |
м |
||||
xE 0.5 |
м |
yA 0 |
м |
||||
yC 0 |
м |
|
|
|
|
||
2.Кинематический анализ
2.1Задача о положениях.
Положение для вывода результатов. |
f 45 |
π |
|
|||
180 |
|
|||||
|
|
|
|
|
|
|
Начальная координата. |
ϕ1(ϕ) ϕ |
|
||||
2.1.1 Начальное звено. Вектор AB. |
|
|
|
|
||
xB(ϕ) lAB cos ϕ1(ϕ) |
xB(f ) 0.071 |
|||||
yB(ϕ) lAB sin ϕ1(ϕ) |
yB(f ) 0.071 |
|||||
2.1.2 Первая структурная группа. |
|
|
|
|
||
Основные точки. Вектор BC |
|
|
|
|
||
|
yB(ϕ) |
|
180 |
|
||
ϕ (ϕ) |
|
π |
ϕ (f ) |
|
|
193.505 |
|
|
|
||||
2 |
lBC |
2 |
|
π |
|
|
|
|
|
|
|||
ϕ (ϕ) ϕ (ϕ) π |
ϕ (f ) 180 |
13.505 |
||||
3 |
2 |
|
3 |
|
π |
|
|
|
|
|
|
|
|
xC(ϕ) xB(ϕ) lBC cos ϕ2(ϕ) |
xC(f ) 0.221 |
Дополнительные точки. Вектор BS2. |
|
xS2(ϕ) xB(ϕ) lBS2 cos ϕ2(ϕ) |
xS2(f ) 0.124 |
yS2(ϕ) yB(ϕ) lBS2 sin ϕ2(ϕ) |
yS2(f ) 0.024 |
2.1.3 Вторая структурная группа. Вектор BD (CD).
|
xB(ϕ) xE |
|
|
|
||
l |
(ϕ) |
|
|
l |
|
l (f ) 0.287 |
|
|
|||||
CD |
|
cos ϕ3(ϕ) |
|
BC |
CD |
|
lBD(ϕ) lBC lCD(ϕ) |
|
|
lBD(f ) 0.587 |
|||
xD xE |
|
|
|
|
xD 0.5 |
|
yD(ϕ) yB(ϕ) lBD(ϕ) sin ϕ2(ϕ) |
yD(f ) 0.066 |
|||||

Интерполяция
N 90 |
n 0 N |
k |
(N 2) |
|
2 π |
||||
|
|
|
xBn xB Xn
VxB pspline(X xB)
xB(ϕ) interp(VxB X xB ϕ)
xCn xC Xn
VxC pspline(X xC)
xC(ϕ) interp(VxC X xC ϕ)
yDn yD Xn
VyD pspline(X yD)
yD(ϕ) interp(VyD X yD ϕ)
xS2n xS2 Xn
VxS2 pspline(X xS2)
xS2(ϕ) interp(VxS2 X xS2 ϕ)
lBDn lBD Xn
VlBD pspline(X lBD)
lBD(ϕ) interp(VlBD X lBD ϕ)
F2n ϕ2 Xn
VF2 pspline(X F2)
ϕ2(ϕ) interp(VF2 X F2 ϕ)
X |
|
(n 1) |
|
k |
|||
n |
|
yBn yB Xn
VyB pspline(X yB)
yB(ϕ) interp(VyB X yB ϕ)
yS2n yS2 Xn
VyS2 pspline(X yS2)
yS2(ϕ) interp(VyS2 X yS2 ϕ)
F3n ϕ3 Xn
VF3 pspline(X F3)
ϕ3(ϕ) interp(VF3 X F3 ϕ)
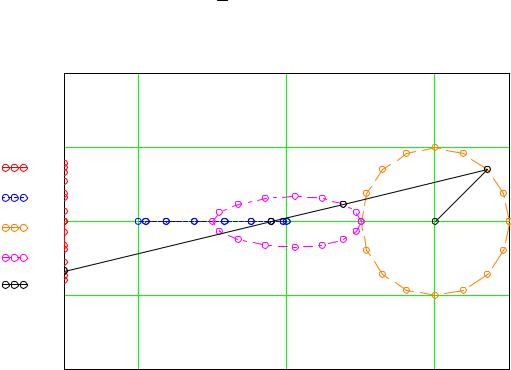
2.1.4 Построение траекторий точек B, C, E и звеньев 1, 2, 3 в положении |
|||||||
x10 0 |
x11 xB(f ) |
x12 xS2(f ) |
x13 xC(f ) |
||||
x14 xD |
|
|
|
|
|||
y10 0 |
y11 yB(f ) |
y12 yS2(f ) |
y13 yC |
||||
y14 yD(f ) |
|
|
|
|
|||
|
j |
0 4 |
π |
2 π |
|
||
|
ϕ 0 |
|
|
||||
|
|
|
|
8 |
|
|
|
|
|
|
0.2 |
|
|
|
|
y |
D |
(ϕ) |
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
yC |
|
|
|
|
|
|
|
yB(ϕ) |
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
yS2(ϕ) |
|
|
|
|
|||
y1j |
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
0.2 |
0.4 |
|
0.2 |
0 |
|
|
|
|
|
|||
|
|
|
|
|
xD xC(ϕ) xB(ϕ) xS2(ϕ) x1j |
||
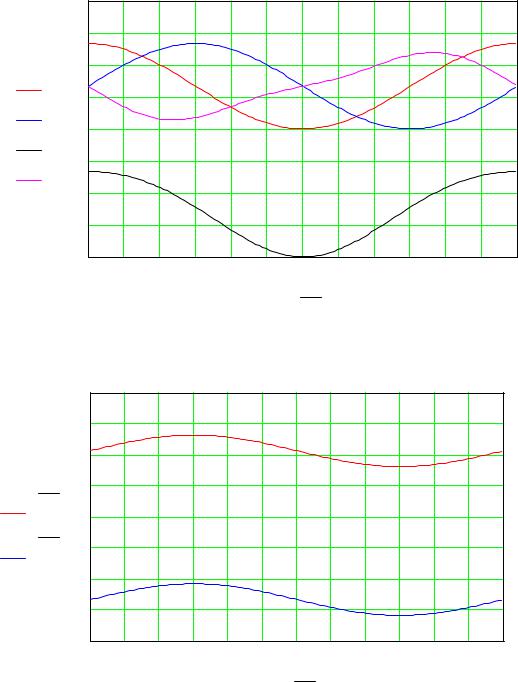
2.1.5 Диаграммы перемещений |
|
|
|
|
|
|
|
|
|||||||
|
|
|
ϕ |
0 .05 2 π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.125 |
|
|
|
|
|
|
|
|
|
|
|
|
xB(ϕ) |
0.05 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
yB(ϕ) 0.025 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
x |
C |
(ϕ) |
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
D |
(ϕ) 0.175 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.325 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.40 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
|
ϕ 180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
250 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
212.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
175 |
|
|
|
|
|
|
|
|
|
|
|
|
ϕ2(ϕ) |
180 |
137.5 |
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ (ϕ) 180 |
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
π |
62.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
500 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
ϕ 180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
2.2Задача о скоростях
2.2.1Аналоги скоростей
vqBx(ϕ) |
d |
|
xB(ϕ) |
vqBx(f ) 0.071 |
|||||
|
|
|
|||||||
|
|
|
dϕ |
|
|
||||
vqBy(ϕ) |
d |
|
yB(ϕ) |
vqBy(f ) 0.071 |
|||||
|
|
|
|||||||
|
|
|
dϕ |
|
|
||||
ω |
(ϕ) |
d |
|
|
ϕ (ϕ) |
ω |
(f ) 0.236 |
||
dϕ |
|||||||||
q2 |
|
2 |
q2 |
|
|||||
ω |
(ϕ) |
d |
|
|
ϕ (ϕ) |
ω |
(f ) 0.236 |
||
dϕ |
|||||||||
q3 |
|
3 |
q3 |
|
|||||
vqCx(ϕ) |
d |
|
xC(ϕ) |
vqCx(f ) 0.054 |
|||||
|
|
|
|||||||
|
|
|
dϕ |
|
|
||||
v |
qDy |
(ϕ) |
d |
|
y |
|
(ϕ) |
v |
qDy |
(f ) 0.055 |
|||
dϕ |
|
||||||||||||
|
|
|
|
|
D |
|
|
||||||
v |
|
(ϕ) |
|
d |
|
|
l |
(ϕ) |
v |
|
(f ) 0.039 |
||
|
|
|
|
|
|
|
|||||||
|
qlBD |
|
dϕ |
|
BD |
|
qlBD |
||||||
vqS2x(ϕ) |
|
d |
xS2(ϕ) |
vqS2x(f ) 0.06 |
|||||||||
|
|
||||||||||||
|
|
|
|
dϕ |
|
|
|
|
|
||||
vqS2y(ϕ) |
|
d |
yS2(ϕ) |
vqS2y(f ) 0.025 |
|||||||||
|
|
||||||||||||
|
|
|
|
dϕ |
|
|
|
|
|
||||
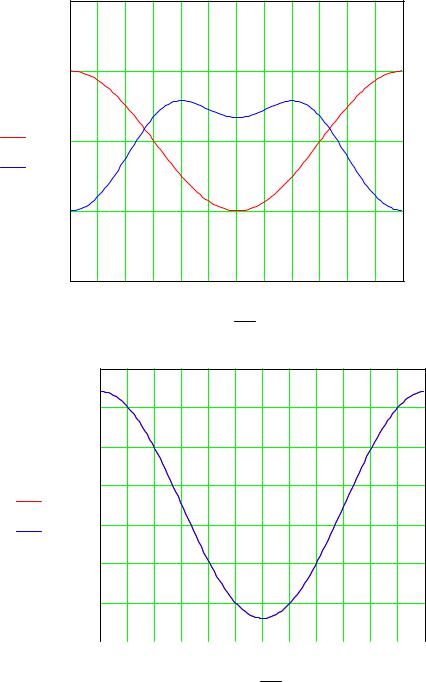
2.2.2 Диаграмма аналогов скоростей |
|
|
|
|
|
||||||||
ϕ 0 0.05 2 π |
|
|
|
|
|
|
|
|
|
|
|
||
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
vqBy(ϕ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
vqDy(ϕ) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.20 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
ϕ 180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
0.2857 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1714 |
|
|
|
|
|
|
|
|
|
|
|
|
ωq2(ϕ) 0.0571 |
|
|
|
|
|
|
|
|
|
|
|
||
ωq3(ϕ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0571 |
|
|
|
|
|
|
|
|
|
|
|
|
0.1714
0.2857
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
||
ϕ 180
π

2.2.3 Скорости.
vBx(ϕ) vqBx(ϕ) ω1 |
|
vBx(f ) 1.061 |
|||||
vBy(ϕ) vqBy(ϕ) ω1 |
|
vBy(f ) 1.061 |
|||||
v |
B |
(ϕ) |
v (ϕ)2 v |
(ϕ)2 |
v |
B |
(f ) 1.5 |
|
|
Bx |
By |
|
|
||
ω2 |
(ϕ) |
ωq2(ϕ) ω1 |
|
ω2 |
(f ) 3.536 |
||
ω3 |
(ϕ) |
ωq3(ϕ) ω1 |
|
ω3 |
(f ) 3.536 |
||
vC(ϕ) |
vqCx(ϕ) ω1 |
|
vC(f ) 0.813 |
||||
vDy(ϕ) vqDy(ϕ) ω1 |
|
vDy(f ) 0.819 |
|||||
vlBD(ϕ) vqlBD(ϕ) ω1 |
|
vlBD(f ) 0.592 |
|||||
vS2x(ϕ) vqS2x(ϕ) ω1 |
|
vS2x(f ) 0.896 |
|||||
vS2y(ϕ) vqS2y(ϕ) ω1 |
|
vS2y(f ) 0.373 |
|||||
v |
S2 |
(ϕ) v |
(ϕ)2 v |
(ϕ)2 |
v |
S2 |
(f ) 0.97 |
|
|
S2x |
S2y |
|
|
||
2.3 Задача об ускорениях.
2.3.1 Аналоги ускорений.
aqBx(ϕ) |
d2 |
xB(ϕ) |
aqBx(f ) 0.071 |
||||||||
2 |
|||||||||||
|
|
|
|
dϕ |
|
|
|
||||
aqBy(ϕ) |
d2 |
yB(ϕ) |
aqBy(f ) 0.071 |
||||||||
2 |
|||||||||||
|
|
|
|
dϕ |
|
|
|
||||
ε |
q2 |
(ϕ) |
d2 |
|
ϕ (ϕ) |
ε |
q2 |
(f ) 0.236 |
|||
2 |
|||||||||||
|
|
2 |
|
|
|||||||
|
|
|
dϕ |
|
|
|
|
|
|||
ε |
q3 |
(ϕ) |
d2 |
|
ϕ (ϕ) |
ε |
q3 |
(f ) 0.236 |
|||
2 |
|||||||||||
|
|
3 |
|
|
|||||||
|
|
|
dϕ |
|
|
|
|
|
|||
aqCx(ϕ) |
d2 |
xC(ϕ) |
aqCx(f ) 0.071 |
||||||||
2 |
|||||||||||
|
|
|
|
dϕ |
|
|
|
||||
a |
qDy |
(ϕ) |
|
d2 |
|
y |
(ϕ) |
a |
qDy |
(f ) 0.108 |
||
|
2 |
|||||||||||
|
|
|
|
|
D |
|
|
|||||
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
a |
|
(ϕ) |
d2 |
|
|
l |
(ϕ) |
a |
|
(f ) 0.078 |
||
|
2 |
|
||||||||||
|
qlBD |
|
|
BD |
|
qlBD |
||||||
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
aqS2x(ϕ) |
|
d2 |
xS2(ϕ) |
aqS2x(f ) 0.071 |
||||||||
|
2 |
|||||||||||
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
aqS2y(ϕ) |
|
d2 |
yS2(ϕ) |
aqS2y(f ) 0.022 |
||||||||
|
2 |
|||||||||||
|
|
|
|
dϕ |
|
|
|
|
|
|
|
|
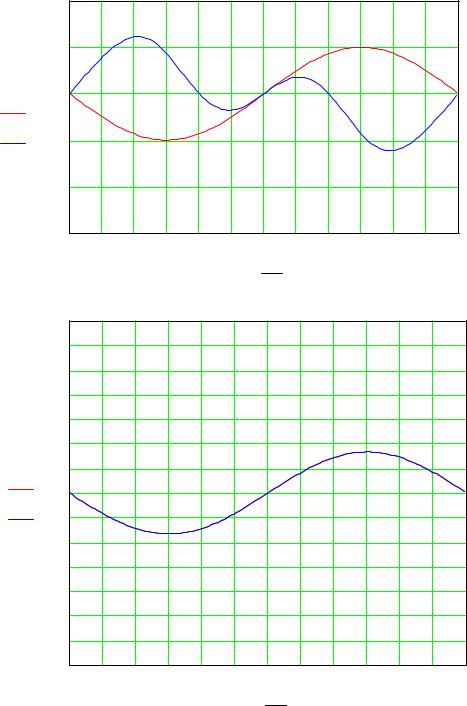
2.3.2 Диаграммы аналогов ускорений. |
|
|
|
|
|
|
||||||||
ϕ 0 0.05 2 π |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
aqBy(ϕ) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
(ϕ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
qDy |
0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
ϕ 180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
1.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
ε |
q2 |
(ϕ) |
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εq3(ϕ) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.40 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
|
|
ϕ 180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|