3.3.1. Вывод уравнений для X и y.
Для начала выведем уравнения для первой системы.
Решение первой системы мы находили ранее:
или, после подстановок:
 (3.12)
(3.12)
Для последующих вычислений мы будем пользоваться системой (3.12).
Найдем
 из уравнения (3.12):
из уравнения (3.12):

Общий
вид уравнений нам известен – он останется
таким же как и в системе уравнений
(3.12). Однако нам неизвестны коэффициенты
 .
В их нахождении и состоит наша задача.
.
В их нахождении и состоит наша задача.
Мы имеем систему дифференциальных уравнений второго порядка. Чтобы решить ее необходимо понизить степень уравнений и получить столько дифференциальных уравнений первого порядка, сколько неизвестных у нас получится.
Переобозначим переменные:
 (3.14)
(3.14)
Теперь запишем четыре новых уравнения для четырех неизвестных, исходя из подстановки (3.14):
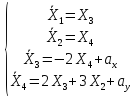
Как мы нашли в предыдущих главах:
 ;
;
 ; (3.15)
; (3.15)
Запишем уже известные нам элементы этого уравнения:
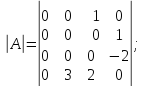


Соответственно,
нам необходимо найти только одну
недостающую матрицу – матрицу
 ,
ее мы построим из выражений (3.12) и (3.13)
как коэффициенты при
,
ее мы построим из выражений (3.12) и (3.13)
как коэффициенты при в каждом из уравнений:
в каждом из уравнений:
Продифференцировав (3.15) получим:
 ;
;
Соответственно, поставим в полученное выражение известные нам матрицы и перейдем обратно, к системам уравнений:
Теперь
мы можем выразить
 .
.







Таким
образом не выраженной осталось только
 .
Сделаем это:
.
Сделаем это:

Мы получили производные необходимых нам функций:
Чтобы
найти функции
 ,
возьмем интеграл, от их производных.
При этом коэффициентом интегрирования
будет сама функция для момента времени
,
возьмем интеграл, от их производных.
При этом коэффициентом интегрирования
будет сама функция для момента времени :
:
Таким
образом, мы нашли коэффициенты
 общий
вид уравнений относительного движения
с протяженной тягой, нам известен – он
останется таким же как и в системе
уравнений (3.12). Теперь осталось только
подставить коэффициенты в уравнения.
общий
вид уравнений относительного движения
с протяженной тягой, нам известен – он
останется таким же как и в системе
уравнений (3.12). Теперь осталось только
подставить коэффициенты в уравнения.



 ;
;


 ;
;
3.3.2. Вывод уравнений для z.
Теперь выведем уравнение протяженного движения для:

 (3.16)
(3.16)
Решением данного уравнения будет являться следующая система:
 (3.17)
(3.17)
Чтобы понизить степень дифференциального уравнения введем подстановку:

Тогда уравнение примет вид
 (3.18)
(3.18)
 (3.19)
(3.19)
Подставим уравнения (3.18) и (3.17(2)) в уравнение (3.16):

Вычтем уравнение (3.19) из (3.17(1)):

После сокращений получаем:
Выразим
 :
:
Проинтегрируем
эти функции. При этом коэффициентом
интегрирования будет сама функция для
момента времени
 :
:

Подставим полученный результат в (3.17(1)):

 .
.
Итого. Запишем все полученные уравнения относительного движения с протяженным приложением ускорения, которые мы нашли:

3.4. Применение полученных формул относительного движения.
3.4.1. Движение вдоль оси х без изменения положения по осям y и z.
Это означает, что начальные условия нашего движения:
x0
= X0
,
 ,t0
= 0,
,t0
= 0,
y0
=
z0
=0,
 ,
,
Из уравнения (3.0), подставив начальные условия находим:

Рассмотрим два случая:
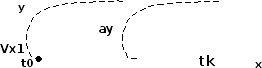
а) для случая движения с постоянной скоростью и гашением ее на последнем участке.
Тогда:

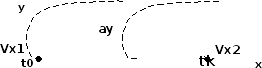
Жирной линией обозначена траектория, которую мы должны обеспечить, пунктирная линия показывает траекторию, которую мы получаем в случае двух не скомпенсированных импульсов Vx1 и Vx2.
Vx1 – импульс начинающий движение; Vx2 –импульс заканчивающий движение; ay – ускорение прикладываемое по оси Y по всему пути движения для стабилизации орбиты на заданной нами.
Рассчитаем полный расход топлива на данный маневр, для этого найдем полную скорость за маневр:

б) для случая постепенно уменьшающейся скорости до нуля на последнем участке.

Vx1 – импульс начинающий движение; Vx2 –импульса, в этом случае, нет; ay – ускорение прикладываемое по оси Y по всему пути движения для стабилизации орбиты на заданной нами.

Тогда:

Рассчитаем полный расход топлива на данный маневр, для этого найдем полную скорость за маневр: