

3. Практическая часть.
3.1. Вывод уравнений, решением дифференциальных уравнений движения, применительно к пассивному относительному движению двух ка.
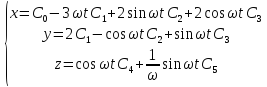
Возьмем уравнение:
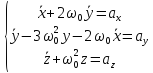

Оно выражает относительное движение двух КА по произвольной орбите. Причем один из аппаратов пассивно движется по опорной невозмущенной кеплеровой орбите, а второй движется активно (маневрируя) по орбите, которая может отличаться от опорной как за счет начального рассогласования орбит, так и за счет действия возмущающего ускорения.
Решение
этого уравнения подробно описано ранее.
Получаем: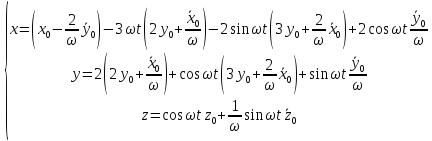 (3.1)
(3.1)
 (3.2)
(3.2)
Данные системы уравнений можно решить и численным методом, однако это потребует больших вычислительных мощностей, поэтому мы решим это иным способом.
Введем подстановку:
 (3.3)
(3.3)


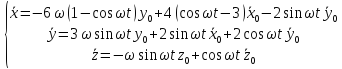
Действуя тем же методом, находим:
 (3.4)
(3.4)
Выполним замену в выражение (1):
 (3.5)
(3.5)
Решив дифференциальные уравнения (3.4), получаем:
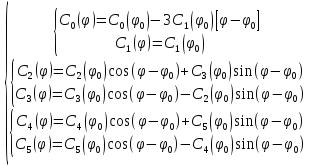 (3.7)
(3.7)
Решив
систему уравнений (3.3) найдем x,
y,
z,
 ,
, от
от :
:
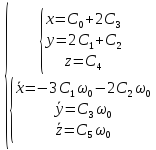 (3.8)
(3.8)
3.2. Вывод уравнений для импульсного относительного движения двух ка.
До
этого момента, мы рассматривали случай
относительного движения без ускорения:
 .
.
Однако, космические аппараты движутся не только пассивно, но и с приложением ускорения – именно таким образом мы изменяем орбиту и траекторию движения в зависимости от того, как нам это необходимо.
Для начала рассмотрим уравнение движения, когда в некий момент времени пассивного движения дается мгновенный импульс.
Импульсом
мы считаем поданное ускорение
 ,
, )за
бесконечно малый промежуток времени.
В данном случае импульс можно считать
дельта-функцией.
)за
бесконечно малый промежуток времени.
В данном случае импульс можно считать
дельта-функцией.
Обозначим
момент начала движения за
 ,
момент окончания движения
,
момент окончания движения ,
а момент, когда дан импульс за
,
а момент, когда дан импульс за :
:


Коэффициент с индексом «+», это коэффициент после импульса, а с индексом «-», до импульса.
Соответственно,
с момента времени
 ,
до
,
до

 ,
а с момента времени
,
а с момента времени ,
до
,
до
 .
.
3.2.1. Вывод уравнения импульсного относительного движения из общего уравнения движения , двумя методами.
Рассмотрим, для начала, для наиболее простое уравнение относительного движения из системы (6.16):
 ,
,

Его
решение в общем виде ( =0)
имеет вид:
=0)
имеет вид:
 (3.9)
(3.9)
Мы вычислили это в предыдущем пункте.
Теперь решим это же уравнение, но пойдем дальше, и уже не будем считать, что ускорение равно нулю, а решим уравнение применительно к импульсу. Для проверки результатов, а так же для выявления наиболее быстрого способа решения для использования его в последующем, решим этот случай двумя способами.
Решение
 ,
для импульсного движения, методом
вариации произвольных постоянных
Лагранжа.
,
для импульсного движения, методом
вариации произвольных постоянных
Лагранжа.
Сущность метода состоит в том, чтобы найти сначала решение уравнений в общем виде, для однородного уравнения. Вид решений неоднородного уравнения останется прежним, только постоянные перестанут быть константами, а станут функциями по времени. Таким образом, остается только найти эти функции.
Теперь
перейдем к решению случая, когда
 (неоднородное
уравнение), не забывая, что константы
станут функциями по времени:
(неоднородное
уравнение), не забывая, что константы
станут функциями по времени:

Понизим степень уравнений:
 ,
уравнения примут вид:
,
уравнения примут вид:
 (3.10)
(3.10)
Подставим
(3.10) в
 :
:

Теперь
подставим (3.10) в
 :
:


После сокращений остается:

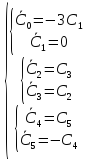
Теперь выразим константы:
Проинтегрировав получим следующие функции:
Такое решение интеграла мы получаем в связи с тем, что интегрируем дельта-функцию по бесконечно малому отрезку времени.
Если мы будем считать тем же способом для n импульсов, то получим следующий результат:
Таким образом, мы видим, что для расчета нескольких импульсов этим способом решение меняется от одноимпульсного на последнем шаге.
Так
как координаты для конечного момента
относительного движения
 ,
часто принимают за ноль (оба аппарата
оказались в одной точке), то для удобства,
выразим
,
часто принимают за ноль (оба аппарата
оказались в одной точке), то для удобства,
выразим из
выражения (3.9):
из
выражения (3.9):


Объединим
эти уравнения и произведем обратную
замену переменных. Для этого мы помножим
первое уравнение на
 ,
а второе на
,
а второе на и сложим их:
и сложим их:





Таким образом, мы получили общую формулу, благодаря которой можем определить конечные параметры при заданных начальных условиях и данных об импульсах.
Методом прямых вычислений (подстановки).
Теперь
попробуем решить то же самое уравнение
 ,
но методом прямых вычислений. Делается
это для проверки результатов, а так же
для выявления наиболее быстрого способа
решения для использования его в
последующем.
,
но методом прямых вычислений. Делается
это для проверки результатов, а так же
для выявления наиболее быстрого способа
решения для использования его в
последующем.

Запишем это уравнение в приложении к единичному импульсу:


Для
момента времени
 :
:

Как уже говорилось ранее:
Коэффициент с индексом «+», это коэффициент после импульса, а с индексом «-», до импульса.
Соответственно,
с момента времени
 ,
до
,
до

 ,
а с момента времени
,
а с момента времени ,
до
,
до
 .
.
Добавим
второй импульс и запишем уравнения для
движения до момента времени
 ,
(не включая его):
,
(не включая его):



Таким
образом, в этих уравнениях отображено,
что КА движется с момента времени
 пассивно, в момент
пассивно, в момент подается
импульс, и с
подается
импульс, и с КА опять движется пассивно.
КА опять движется пассивно.





Аналогично:





Запишем формулу для 3-х импульсов, тем же способом:
















Теперь, когда мы вычислили три итерации для трех импульсов, мы можем увидеть закономерность и продлить ту же формулу для n числа импульсов:
Объединим
эти два уравнения. Для этого первое
уравнение мы умножим на
 ,
а второе на
,
а второе на ,
после чего сложим их левые и правые
части. Получим:
,
после чего сложим их левые и правые
части. Получим:



Таким образом, мы получили два одинаковых уравнения двумя способами – методом вариации произвольных постоянных Лагранжа и методом прямых вычислений (подстановки). Оба эти метода дают верное решение, однако, для решения методом Лагранжа системы уравнений (6.16), необходимо будет упрощать, лианеризовывать, решать сложное дифференциальное уравнение второго порядка – это может привести к ошибке в расчетах.
Поэтому, для решения остальных уравнений этой системы мы используем чуть более длинный в расчетах, но менее вычислительноемкий метод – метод прямой подстановки.