

НИРС2
.docСодержание
Введение……………………………………………………………………4
1.Теоретическая часть…………………………………………………....6
1.1.Общие сведения о РЛС………………………………………………...6
1.2.Принцип работы РЛС……………………………………………….….7
2. Практическая часть……………………………………………………9
Заключение……………………………………………………………….14
Список литературы……………………………………………………...15
Введение
Цель работы РЛС – обнаружение и распознавание целей на фоне пассивных и активных помех. Решению данной задачи посвящена данная НИРС.
Для обнаружения цели, с помощью приемной антенны и приемного устройства (Прм) можно принять часть рассеянного сигнала, преобразовать и усилить его для последующего обнаружения. Таким образом, простейшая РЛС может состоять из передатчика (Прд), формирующего и генерирующего радиосигналы, передающей антенны, излучающей эти радиосигналы, приемной антенны, принимающей отраженные сигналы, радиоприемника, усиливающего и преобразующего сигналы и, наконец, выходного устройства (ВУ), обнаруживающего отраженные сигналы .
Как правило, амплитуда (или мощность) принимаемого сигнала мала, а сам сигнал имеет случайный характер. Малая мощность сигнала объясняется большим расстоянием до объекта (цели) и поглощением энергии сигнала при его распространении. Кроме того, на интенсивность отраженного сигнала существенно влияют размеры целей. Случайный характер сигнала является следствием флуктуации отраженного сигнала за счет случайного перемещения элементов цели сложной формы при отражении РВ, многолучевого РРВ, хаотических изменений амплитуды сигнала при распространении и ряда других факторов. В результате принимаемый сигнал по виду, интенсивности и характеру изменения похож в приемном тракте на шумы и помехи. Поэтому первой и основной задачей РЛС является обнаружение полезного радиосигнала, т.е. вынесение решения о присутствии полезного сигнала в поступающей на вход приемного тракта смеси полезного сигнала с помехами, называемой входной реализацией. Эта статистическая задача решается входящим в радиолокационное устройство (РЛУ) специальным устройством – обнаружителем, в котором стараются использовать алгоритм оптимального (наилучшего) обнаружения. Качество процесса обнаружения характеризуют вероятностью правильного обнаружения, когда присутствующий во входной реализации сигнал
обнаруживается, и вероятностью ложной тревоги, когда за полезный сигнал принимается помеха, а сам сигнал отсутствует.
1.Теоретическая часть
1.1Общие сведения о РЛС.
Большинство параметров принимаемого сигнала априори неизвестны, поэтому при обнаружении приходится осуществлять поиск нужного параметра радиосигнала, отличающего его от сопутствующих шумов и помех.
Передатчик формируют мощные высокочастотные колебания. В зависимости от того, какая антенна используется в РЛС, может быть реализован в модульном варианте и встроен в активную ФАР, либо в виде модулятора и однокаскадного или многокаскадного генератора радиочастоты для пассивной ФАР или зеркальной антенны.
Приемник обеспечивает прием, обработку и выделение информации из принятого сигнала. Короткие зондирующие импульсы через антенну излучаются в пространство. При наличии на пути распространения радиоволн объекта (цели) часть электромагнитной энергии отражается обратно в сторону РЛС.
Отраженный сигнал через антенну поступает в приемник, усиливается и поступает в выходное устройство для индикации и (или) обработки (обнаружитель, измерители).
Построение РЛС на базе современных технологий обработки информации заключается: в использовании в качестве антенн фазированной антенной решетки (ФАР), работающей на передачу и прием сигналов; в качестве генератора пусковых импульсов синтезатора частоты – синхронизатора, регламентирующего во времени порядок работы и взаимодействия основных блоков РЛС; в качестве выходного устройства – цифрового процессора.
В итоге перспективная РЛС) состоит из ФАР, синтезатора-
синхронизатора, аналогового процессора (приемника), цифрового процессора и устройства отображения информации. Антенна по сигналам от цифровой вычислительной машины (ЦВМ) осуществляет формирование лучей и их перемещение для обзора пространства. Радиопередатчик формирует зондирующие сигналы, которые излучаются антенной. Радиоприемник усиливает слабые отраженные целью и принятые антенной сигналы. Поскольку эти сигналы приходят в смеси с шумами и помехами, то их выделение осуществляется с помощью согласованных фильтров сосредоточенной селекции и цифровых фильтров.
Обычно процессор сигналов (приемник) выдает электрические сигналы в цифровом коде. Дальнейшая обработка сигналов выполняется в процессоре данных по заложенным в него программам алгоритмов обработки. Рабочие частоты и временные интервалы в РЛС задаются с помощью синтезатора- синхронизатора. Устройство отображения информации (УОИ) выполняется обычно на индикаторе с электроннолучевой трубкой или на дисплее процессора. Количество одновременно обнаруживаемых и сопровождаемых целей определяется быстродействием систем обработки информации – выходного устройства, в качестве которого обычно используется цифровой процессор.
1.2. Принцип работы РЛС.
РЛС предназначена для определения координат и скорости цели и дальнейшего за ней наблюдения.
Принцип работы РЛС состоит в следующем: антенна подсвета и обзора (АПО) посылает зондирующие импульсы в пространство, они, отражаясь от целей и поверхностей, возвращаются и принимаются антенной решеткой, сигналы с антенной решетки поступают в модуль цифровой обработки сигналов (ЦОС), сигнал с ЦОС поступает в ПАУК, где осуществляется выбор режим работы, после чего данный цикл повторяется (рис 1).
У рассматриваемой нами РЛС существует три режима работы:
- обзор;
- захват;
- сопровождение.
Переключение
режимов осуществляется прибором
автоматического управления координатором.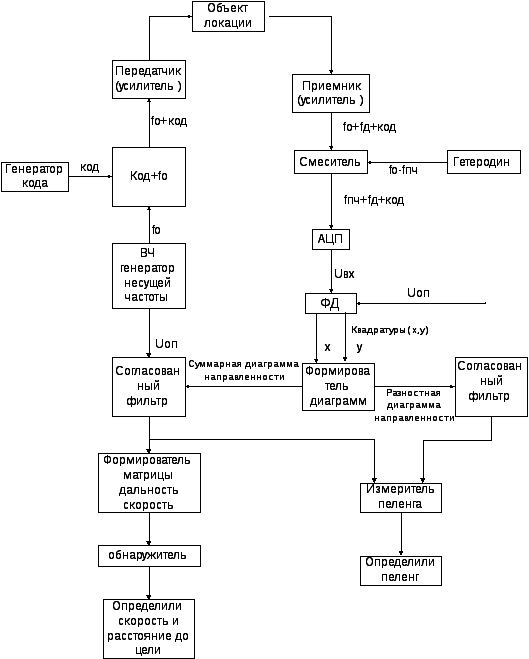
Рисунок 1.Функциональная схема работы РЛС.
Кратко о режимах работы РЛС.
1.Обзор. В данном режиме работы задача РЛС – найти пределы в которых будет находится цель с небольшой точность, но сделать это как можно быстрей. Это осуществляется путем вращения антенны на 360 с определенной угловой скоростью и периодом повторения.
2.Захват. Как только цель будет найдена, РЛС переключится во второй режим работы – захват. Задача этого этапа – определение положения, скорости цели и пеленга с более высокой точностью, что достигается поворотом лучей антенной решетки(АР).
3. Сопровождение. После осуществления захвата РЛС переходит в режим сопровождения - слежения за целью.
В данной НИРС подробно будет рассмотрен второй режим работы.
2.Практическая часть.
В моделируемой РЛС в качестве зондирующих импульсов используется ФКМ сигнал со следующими параметрами:
- сигнал кодируется кодом Баркера (тринадцатизначная последовательность)( -1,-1,-1,-1,1,-1,1,-1,1,1,-1,-1,1);
- частота АЦП facp=74*10^6 [Гц];
- длительность парциального импульса tauimp=0.5*10^(-6) [с] ;
- число отсчетов в интервале анализа ttmax=1500;
- промежуточная частота fph=57*10^6[Гц];
- число импульсов в пачке N=10;
- Период повторения Tpov=200*10^(-6) [с];
- число импульсов в пачке N=10;
Сигнал с данными параметрами представлен на рис.2(пачка импульсов)и рис.3(один импульс).
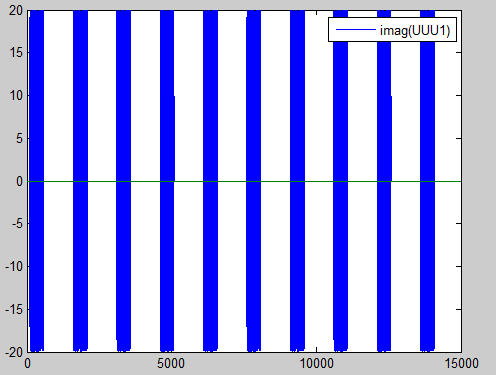
Рисунок 2.Входной сигнал (пачка импульсов).
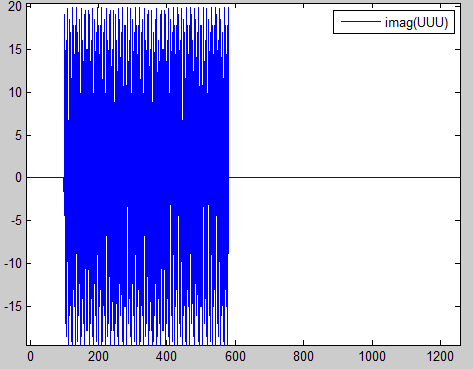
Рисунок 3.Один импульс из пачки.
На входы фазового детектора подаем опорный сигнал и сигнал от приемников антенной решетки, на выходе ФД получаем две квадратуры исходного сигнала. На рис.4 изображены квадратуры всей пачки импульсов, на рис.5 - одного импульса.

Рисунок 4.Выход ФД (две квадратуры исходного сигнала) для всей пачки.
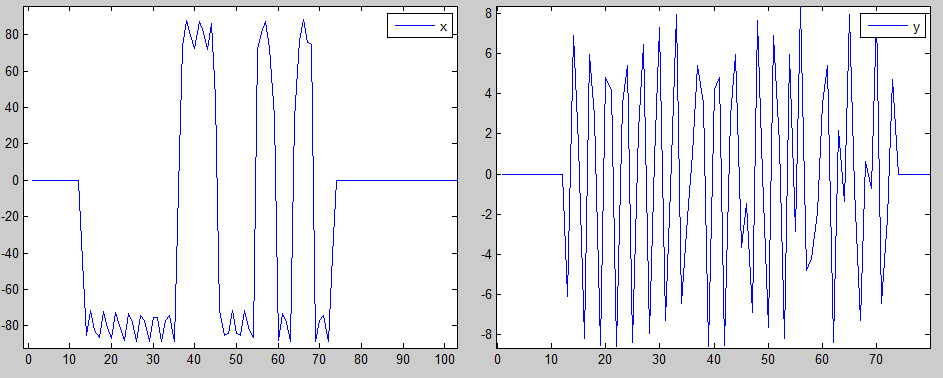
Рисунок 5. Выход ФД(один импульс).
Квадратуры с выходов ФД поступают на формирователь диаграмм направленности, выходом которого являются суммарная (рис.6) и разностная диаграммы.
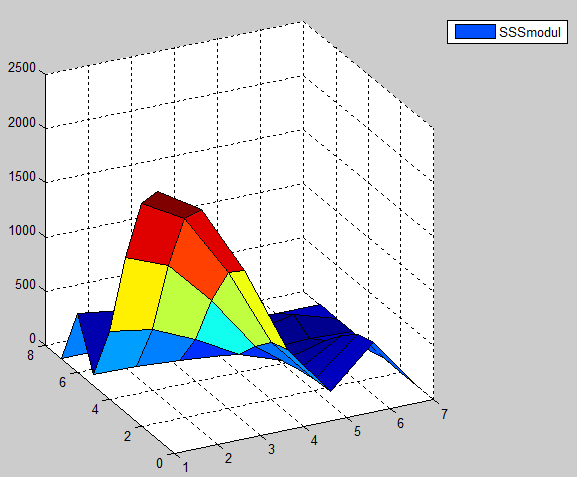
Рисунок 6. Суммарная диаграмма направленности антенной решетки.
Затем на вход согласованного фильтра поступает диаграмма направленности и редуцированный опорный сигнал с ВЧ (высокочастотного) генератора несущей частоты (рис.7) , над которыми выполняется операция свертки.
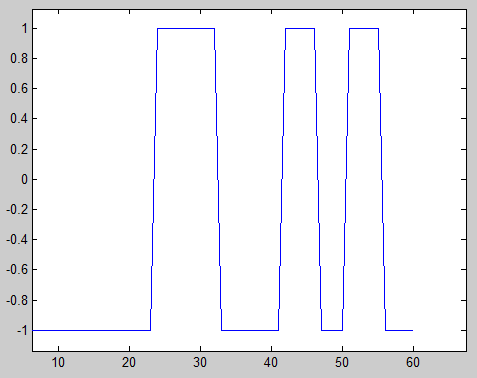
Рисунок 7.Редуцированный опорный сигнал.
Результат свертки изображен на рис.8.
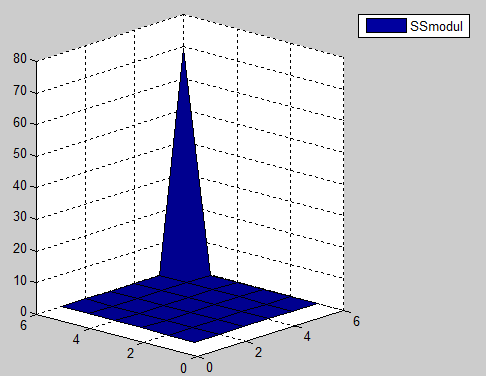
Рисунок 8.Выход согласованного фильтра.
Сигнал с СФ поступает на формирователь матрицы дальность скорость, который с помощью ДПФ (дискретного преобразования Фурье) формирует матрицу, из которой видно в каком скоростном канале находится цель и расстояние до нее (рис.9).
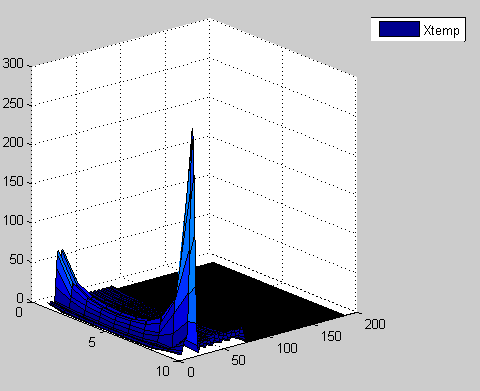
Рисунок 9.Матрица дальность – скорость.
Последний этап-обнаружение. Результат обнаружения представлен на рис.10.
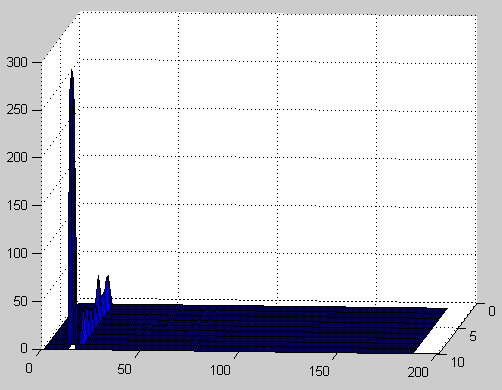
Рисунок 10. Обнаружение.
Заключение
В данной научно-исследовательской работе было осуществлено моделирование РЛС с ФКМ зондирующими сигналами, с помощью программ Matlab и Mathcad, были получены графики иллюстрирующие ее работу поэтапно, промоделировано обнаружение как одной так и нескольких целей, исследовано влияние шумов и пассивных помех на обнаружение целей, результаты были проанализированы и сделаны соответствующие выводы.
Список литературы
1.Баскаков С.И.Радиотехнические цепи и сигналы. – М.:Высш.шк.,2005. – 462 с.
2.Барулин Л.Г.Радиоприемные устройства – М.: Радио и связь,1984. – 272 с.