

556_Sovremennye_problemy_telekommunikatsij_2014_
.pdfАППАРАТ СЕЛЕКТИВНОГО НАНЕСЕНИЯ ЗАЩИТНОГО ПОКРЫТИЯ НА ПЕЧАТНЫЕ УЗЛЫ
Целищев О.В., Шаронов А.Д. ГУП ЦИКТ РБ, Уфа
e-mail: Noir-phoenix@mail.ru, тел.: (347) 216-40-10
Существует проблема с защищенностью печатных узлов (ПУ), применяемых в железнодорожной, воздушной, морской технике и на производстве, от внешних факторов. Для защиты ПУ используются специальные защитные покрытия. ПУ имеют сложную форму, на них установлено множество разнообразных компонентов с различными габаритными размерами и вариантами взаимного расположения. В ряде случаев для защиты печатных узлов требуется использование различных защитных покрытий на одном и том же печатном узле, что усложняет процесс нанесения. Также требуется различать элементы на печатных узлах (часть элементов нуждаются в покрытии, часть – нет).
Существует три способа нанесения защитного покрытия на ПУ:
1)Погружение ПУ в ванну с защитным материалом. При этом компоненты, на которые не должны наноситься защитные покрытия (разъемы, потенциометры, предохранители и т.д.), требуется предохранять (маскировать),
азатем эту маскировку удалять и это делается вручную. Маскирование – трудоемкий и ресурсоемкий процесс, его сложно назвать удобным и экономичным. Неравномерная толщина покрытия по всей площади печатного узла, загрязнение материала, нестабильность вязкости, необходимость маскирования вручную исключают в данном методе возможность обеспечить требуемую повторяемость и качество.
2)Нанесение защитного покрытия кистью. Этот способ также имеет существенные недостатки: высокая трудоемкость, низкая производительность, различная толщина получаемого покрытия, невозможность использования быстросохнущих, быстро полимеризующихся материалов, проблема нанесения покрытий под микросхемой, попадание волосков кисточки в материал, все это снижает защитные свойства покрытия.
3)Селективное нанесение – избирательное нанесение полимерного покрытия, так как на некоторых участках ПУ покрытия просто не должно быть. Цель такой селективности – обеспечение более высокого уровня защиты, следовательно, и надежности последующей работы ПУ при минимальных затратах.
Для производственных компаний все острее встает вопрос о селективности (выборочности) нанесения защитных покрытий и их качестве. Причем необходимо контроль нанесения осуществлять непосредственно в процессе нанесения. По исследованию специалистов в сфере автоматизации технологических процессов в НПП «Полигон» была выявлена необходимость автоматизации процесса нанесения защитных покрытий на ПУ для оборудования морского исполнения. Возникла потребность в селективной
181
защите ПУ от конденсата (все предпосылки к образованию коррозии имеются – это вода-конденсат, электрический ток, проводник), от соляного тумана, от перепадов давления, температуры с целью обеспечения гарантированного срока эксплуатации электронных изделий в тяжелых условиях работы ПУ.
Существующие импортные аппараты селективного нанесения дороги и обладают избыточной производительностью, то есть дорогостоящее оборудование будет нередко простаивать. Кроме того, они не имеют в своем составе систем корректировки позиционирования рабочего органа (модуля нанесения), что является причиной накопления погрешности позиционирования
иможет приводить к повреждению модуля нанесения и ПУ, в особенности на ПУ с большой площадью покрытия. Недостатком также является отсутствие контроля качества в процессе нанесения. Защитный материал находится в жидкой фазе и может содержать пузырьки воздуха, что в процессе нанесения даст пробелы в защитном покрытии. Материал также может попасть под элементы, не требующие покрытия, и в процессе сушки сломать их вследствие термической усадки.
Витоге падает качество, точность и производительность. Появляется необходимость в создании аппаратов с меньшей производительностью и дополнительным функционалом по контролю качества в момент нанесения покрытия.
Разрабатывается аппарат селективного нанесения защитного покрытия на ПУ (рисунок) с обеспечением контроля качества покрытия в момент нанесения
ипо завершении обработки узла посредством системы технического зрения, с возможностью соотнесения данных с производственным заданием по техдокументации. Нередко вследствие человеческого фактора при программировании процесса нанесения или из-за сбоя программы происходит повреждение дорогостоящего модуля нанесения и обрабатываемого ПУ. Поэтому возникает необходимость разработки системы технического зрения для корректировки позиционирования рабочего органа и контроля качества работ и, как следствие, разработки специализированного программного обеспечения. Такой контроль позволяет ускорить процесс обработки ПУ и снижает процент бракованных изделий, отслеживая момент некачественного нанесения покрытия до завершения обработки ПУ и загрузки ее в сушильную печь. Таким образом, некачественно обработанный участок можно заново обработать, вовремя вынув (исключив) такой ПУ из технологической цепочки.
Рабочим органом разрабатываемого аппарата является модуль нанесения защитного покрытия на ПУ, осуществляющий нанесение покрытия под давлением, создаваемым в пневматической системе. Перемещение рабочего органа по рабочей зоне осуществляется трехмерной портальной системой, состоящей из мини-суппорта (ось Z) и трех линейных приводов (оси X и Y). Мини-суппорт обеспечивает перемещение рабочего органа на 80 мм по вертикальной оси (Z). Приводится в движении мини-суппорт посредством пневматической энергии с давлением 6-8 бар, поступающей через пятилинейный пневматический распределитель с электроуправлением.
182
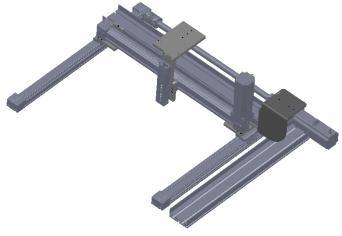
Рисунок – Аппарат селективного нанесения защитного покрытия на печатные узлы
На электромеханическом линейном приводе оси Y закреплен минисуппорт с рабочим органом. В движение линейный привод с рабочим ходом 500 мм приводит шаговый электродвигатель. Перемещение рабочего органа по оси X на 500 мм осуществляется с помощью двух электромеханических линейных приводов, соединенных валом и приводимых в движение одним шаговым электродвигателем. На обеих каретках линейных приводов оси X закреплен линейный привод оси Y. На рабочем органе (модуле нанесения) закреплена камера для видеопоиска элементов, на которые требуется нанести покрытие, контроля качества нанесения защитного покрытия и увеличения точности позиционирования рабочего органа (калибровки). Над комплексом стационарно закреплена камера для распознавания и построения 3D-модели обрабатываемого ПУ, контроля качества нанесения по завершении обработки.
Литература:
1.И.Романова. Влагозащитные покрытия. Материалы и оборудование // Печатный монтаж. –– 2010. –– №4. –– С. 22-33;
2.К. Кушнарев. Современная технология нанесения влагозащитных покрытий // Технологии в электронной промышленности. –– 2006. –– №6. –– С. 54-57.
ЭФФЕКТИВНЫЙ ТЕНЗОРНЫЙ КОЭФФИЦИЕНТ СРЕДЫ С КОНТРАСТНЫМИ МИКРОВКЛЮЧЕНИЯМИ В ГАРМОНИЧЕСКОМ РЕЖИМЕ
Шурина Э.П.1,2, Штабель Н.В.2, Михайлова Е.И.1,2 1 Новосибирский государственный технический университет
2Институт нефтегазовой геологии и геофизики им. А.А. Трофимука СО РАН, Новосибирск e-mail: mik_kat@ngs.ru
Сростом технических возможностей производства значительно возрос интерес к искусственным материалам. Перспективными направлениями
183
исследований являются разработка технологий изготовления композитных материалов и изучение их свойств. Композитные материалы представляют собой искусственные среды, обладающие определенными свойствами, резко отличающимися от свойств естественных материалов. Такие материалы могут состоять как из диэлектрических, так и проводящих элементов (включений), иметь как периодическую, так и хаотическую структуру. Также может варьироваться форма включений [1-2]. В силу сложной геометрии, широкого рабочего диапазона частот, значительно зависящего от электромагнитных характеристик и структуры материала, исследование их аналитическими методами затруднительно. Поэтому предлагается использовать методы численного моделирования. В данной работе для исследования таких структур был применен векторный метод конечных элементов [3-4].
Композитные материалы, рассмотренные в работе, состоят из проводящих микровключений и матрицы. Под матрицей мы понимаем материал образца, окружающий включения. Малые размеры включений по сравнению с длиной волны возбуждаемого поля и общими размерами образца позволяют описать свойства композитного материала с помощью эффективных характеристик. Среда с эффективным коэффициентом – это материал, свойства которого близки к средним значениям образца с микровключениями.
Вработе предложен способ определения эффективной тензорной (анизотропной) характеристики электрофизических свойств среды. Коэффициент включает в себя проводящие и диэлектрические свойства образца
ивычисляется по результатам прямого моделирования электромагнитного поля в областях с включениями в виде комплекснозначного тензора второго ранга.
Вкачестве прямой задачи рассматривается задача моделирования электромагнитного поля, изменяющегося во времени по гармоническому закону. Решается векторное уравнение Гельмгольца относительно
напряженности электрического поля E |
|
|
|
rot 1 rotE k2E 0 |
в Ω |
где k2 i 2 |
– волновое число; 2 f |
– циклическая частота [Гц]; |
r 0 – диэлектрическая проницаемость [Ф/м], εr – относительная диэлектрическая проницаемость, ε0 = 8,85 ×10-12 Ф/м; μ= μrµ0 – магнитная проницаемость [Гн/м], μr – относительная магнитная проницаемость, µ0 = 4π ×10-7 Гн/м; σ – электропроводность среды [См/м], Ω – трехмерная область с
Липшиц-непрерывной границей m e . На границах расчетной области заданы краевые условия
n E |
|
e |
E0 |
, |
|
||||
|
|
|
|
1 rotE n |
|
|
0 |
|
|||
|
|
m |
. |
|
|
Поставленная задача решается векторным методом конечных элементов. Для построения вариационной постановки вводятся функциональные пространства
184

H(rot, ) u L2( ): rotu L2( ) ,
H0(rot, ) u H(rot, ): u n 0
с нормой и скалярным произведением.
Вариационная постановка принимает вид: найти E H0(rot, ) E0 такое,
что v H0(rot, ) выполняется
1 rot E rotvd k2E vd 0
.
Для построения дискретной вариационной постановки расчетная область Ω разбивается на n непересекающихся тетраэдров, вводится конечномерное подпространство Hh0 (rot, ) H0(rot, ) и базисные функции wik Hh0(rot, ).
Дискретная вариационная постановка формулируется следующим образом:
найти |
Eh Hh |
(rot, ) E |
0 такое, что для |
любых функций |
vh Hh |
(rot, ) |
0 |
|
0 |
|
|||
выполняется |
1 rot Eh rotvhd k2Eh vhd 0 |
|
|
|||
|
|
|
|
|||
|
|
|
|
. |
|
|
Неоднородность правой части получаем из неоднородного электрического краевого условия на уровне сборки системы линейных алгебраических уравнений (СЛАУ).
В данной работе предлагается представить композитный материал как некоторую анизотропную среду. Рассматриваются среды, однородные по своим магнитным свойствам. Эффективный тензор Z является аналогом коэффициента i , содержащего информацию о свойствах включений. Тогда, уравнение второго порядка с эффективным коэффициентом принимает вид:
rot 1 rotE i ZE 0
где Z - комплекснозначный тензор второго ранга.
Для того, чтобы вычислить элементы тензора Z, воспользуемся законом
Ампера. Напряженность магнитного поля H можно найти из закона Фарадея следующим образом:
H (i ) 1 rotE.
На основе вычисленных полей E и H выполняется расчет эффективного коэффициента сложной среды в виде осредненного плотного тензора.
Вработе предлагаются и сравниваются два способа вычисления тензора Z.
Входе выполненных исследований один из способов дал некорректные результаты для тестовой задачи в однородной среде. Для проверки корректности вычисленного эффективного коэффициента среды были выполнены расчеты для анизотропной задачи с полученным эффективным коэффициентом Z.
185
Для решения анизотропной задачи вводятся те же функциональные пространства, что и для изотропной. Вариационная постановка принимает вид [7]: найти E H0(rot, ) E0 такое, что W H0(rot, ) выполняется
1 rotE rotWd i ZE Wd 0
|
|
. |
|
Для полученных эффективных характеристик проведено моделирование электромагнитного поля и сравнение с результатами моделирования в областях с включениями. Выполнено сравнение результатов расчета изотропной [5] и анизотропной задач [6-8] для композитных материалов различной конфигурации. Расчеты выполнены на низких и на высоких частотах для разного способа возбуждения поля. Исследована область применимости полученного метода вычисления тензорного коэффициента.
Результаты моделирования анизотропной задачи сравниваются с результатами исходной изотропной задачи. Конфигурация электрического поля, полученного решением задачи с тензорным коэффициентом Z, хорошо согласуется с конфигурацией электрического поля изотропной задачи (с учетом того, что включения в анизотропной задаче не идентифицируются).
Литература:
1.Smith D. R., Kroll N. Negative refractive index in left-handed materials //Physical Review Letters. – 2000. – Vol. 85. – №. 14. – p. 2933.
2.Li J., Huang Y. Introduction to Metamaterials //Time-Domain Finite Element Methods for Maxwell's Equations in Metamaterials. – Springer Berlin Heidelberg, 2013.
3.Nédélec J. C. Mixed finite elements in R3 //Numerische Mathematik. – 1980. – Vol. 35. – №. 3. – pp. 315-341.
4.Nédélec J. C. A new family of mixed finite elements in R3 // Numerische Mathematik. –1986. – Vol.50. – №.1. – pp. 57-81.
5.Эпов М. И., Шурина Э. П., Михайлова Е. И. Моделирование электромагнитного поля в неоднородных по электрофизическим свойствам средах //Теория и численные методы решения обратных и некорректных задач.
– 2013. – С. 107.
6.Орловская Н.В., Шурина Э.П., Эпов М.И. Mоделирование электромагнитных полей в среде с анизотропной электропроводностью // Вычислительные технологии. 2006. Т. 11. № 3. С. 99-116.
7.Орловская Н.В., Шурина Э.П., Эпов М.И. Тензорный коэффициент электропроводности в геофизических приложениях // Вычислительные технологии. 2008. Т. 13. № 1. С. 99-112.
8.Шурина Э. П., Штабель Н. В. Анализ векторных конечноэлементных аппроксимаций уравнений Максвелла в анизотропных средах //Вычислительные технологии. – 2013. – Т. 18. – №. 4. – С. 91-104.
186
Секция 11
СИСТЕМЫ АВТОМАТИЧЕСКОГО ПРОЕКТИРОВАНИЯ
РЕАЛИЗАЦИЯ SDR-МОДЕМА НА ОСНОВЕ СОВРЕМЕННЫХ СИСТЕМ
– НА КРИСТАЛЕ (СнК)
Алексеев А.А., Захаров К.В. СибГУТИ, Новосибирск
e-mail: alekseev@sphinx-ed.com, тел.: +7-906-906-87-86
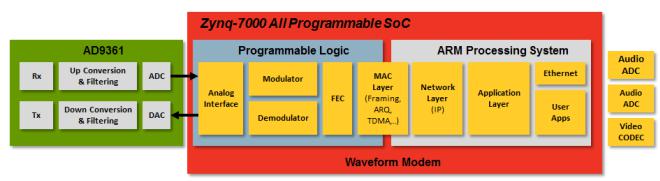
Одним из основных компонентов SDR устройств являются программируемые логические микросхемы ПЛИС и цифровые сигнальные процессоры DSP. Эти компоненты широко распространены и имеют невысокую стоимость, поэтому, при грамотном и тщательном проектировании, возможно получить довольно недорогое универсальное устройство базе архитектуры. Для таких систем характерны высокие требования к производительности подсистемы цифровой обработки сигналов и высокая сложность алгоритмов. Использование связки DSP+FPGA позволяет применять традиционный подход к проектированию, снизить стоимость системы и время разработки. Для еще большего повышения производительности и гибкости системы, снижении энергопотребления и стоимости конечного изделия предлагается разрабатывать SDR-системы на основе современных SoC Zynq фирмы Xilinx, совмещающие на одном кристалле ПЛИС и мощный двухъядерный процессор, построенный на архитектуре ARM Cortex-A9. Упрощенная архитектура SRD-устройства, построенного на базе SoC Zynq приведена на рисунке.
Рисунок - Структурная схема SDR-модема
187
ТЕХНОЛОГИЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО УСТРОЙСТВА
Ануфриева У.А. СибГУТИ, Новосибирск
e-mail: anufrieva.u@mail.ru, тел.: 8-923-235-85-44
Повсеместное внедрение беспроводных коммуникаций, таких как GPRS или WI-FI, а также рост вычислительной мощности мобильных устройств постепенно приводят к росту доли мобильных пользователей в сети интернет. В связи с этим растет и число мобильных сервисов - услуг, предоставляемых через сеть мобильным пользователям. Сервисы, использующие информацию о местоположении устройства, называются сервисами, основанными на местоположении или LBS-сервисами (Location-Based Services). Актуальность таких сервисов возрастает с постоянным развитием технологий позиционирования.
Технологии позиционирования в сотовых сетях можно разделить на три группы:
1.Позиция определяется телефоном без участия сетевой инфраструктуры
(Mobile-Assisted).
2.Позиция определяется мобильным телефоном при помощи сетевой инфраструктуры. Мобильное устройство производит некоторые вычисления и отправляет их сотовому оператору, который рассчитывает местоположение и хранит эту информацию у себя (Network-Based).
3.Позиция полностью рассчитывается сетевой инфраструктурой (Mobile-
Based).
Для одних задач необходимо определение точного положения устройства (LBS), а для других достаточно привязки к местонахождению пользователя (район, область, Location-dependent service). В первом случае это задачи навигации, получения актуальной информации, связанной с координатами, например, отображение текущего положения мобильного устройства на карте. Во втором — знания точных координат не требуется, система оперирует понятием «район»
Дисплеи современных мобильных телефонов имеют возможности отображать на экране электронные карты достаточно высокого качества, что в свою очередь позволяет визуализировать информацию, получаемую с помощью сервисов, основанных на местоположении, в результате чего она становится исключительно полезной и наглядной.
В данном докладе рассмотрены стандартизованные технологии определения местоположения мобильного устройства в сотовых сетях.
Выявлены наиболее оптимальные технологии по точности определения местоположения и ресурсоемкости.
188
ИССЛЕДОВАНИЕ И РАЗРАБОТКА МЕТОДОВ ОПТИМАЛЬНОГО ПОИСКА САПР
Баженов А.Е. СибГУТИ, Новосибирск
На современных промышленных предприятиях внедряется большое количество различных автоматизированных информационных систем, образующих в совокупности виртуальное предприятие и охватывающих все стадии жизненного цикла изделия (CALS – «ComputerAidedAcquisitionandLifeCycleSupport» – Автоматизация непрерывных поставок и жизненного цикла изделия). Ускорение темпов инновационных процессов является решающим условием повышения эффективности финансово-хозяйственной деятельности предприятия и качества продукции. Высокие темпы развития инновационных процессов должны обеспечиваться разработкой, производством и массовым применением высокоэффективных машин, оборудования, приборов и технологических процессов. Объективным препятствием повышению качества выпускаемых изделий и сокращения сроков их разработки является несоответствие между сложностью проектируемых объектов и устаревшими методами и средствами их проектирования. Применение математических методов, программ и ЭВМ в процессе проектирования способствует повышению технического уровня и качества проектируемых объектов, сокращению сроков их разработки и освоения в производстве. Автоматизация процессов проектирования особенно эффективна, когда от автоматизации выполнения отдельных инженерных расчетов переходят к комплексной автоматизации, создавая для этой цели системы автоматизированного проектирования (САПР).
Для того чтобы внедрить систему автоматизированногопроектирования, вначале естественно попытаться применить имеющиеся на рынке программные комплексы. При решении задачи выбора наиболееподходящей для данного предприятия системы автоматизированного проектирования, необходимо учитывать разнородныетребования, предъявляемые к программным комплексам такого рода. При этом некоторая часть требований может быть оценена количественно, но часть требований – качественные. Требования, предъявляемые разными отделами предприятия, могут существенно отличаться друг от друга. Кроме этого, нужно учитывать затраты на приобретение и использование программного комплекса, которые также разнородны.
Анализ работ показал, что подобной методики не существует. Большинство подходов ориентированы, в основном, на экономические оценки проектов и не учитывают полноту выполнения работ (функций), необходимых для реализации процесса проектирования. В то время как системы автоматизированного проектирования внедряются именно для обеспечения выполнения функций проектирования.
189
МЕТОДИКА РАСЧЕТА ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ ДОСТОВЕРНОСТИ РАЗНОРОДНЫХ СРЕД ИНФОРМАЦИОННОГО ПРОСТРАНСТВА
Гончаров С.А., Сединин В.И. СибГУТИ, Новосибирск
В современных информационных системах уже сложно встретить автономные информационные системы, все чаще предпочтение отдается распределенным системам, например клиент серверные технологии или технологии дистанционного банковского обслуживания, облачные технологии.
Однако, наряду с удобством и универсальностью таких систем, существуют так же и повышенные требования с точки зрения обеспечения информационной безопасности. В общем случае такие системы представляют собой независимые среды – клиент и сервер, а так же среду передачи данных между ними. Наиболее актуальной проблемой при создании таких систем, в области защиты информации является проблема определения достоверности сред. Клиентская часть системы должна с определенной вероятностью определить, достоверен ли сервер, к которому она обращается и наоборот серверная часть должна с определенной вероятностью определить достоверность клиента. Типичным примером может стать система дистанционного банковского обслуживания: клиентское программное обеспечение должно однозначно определить, что обращается к серверу банка, а не к злоумышленнику, так же и сервер должен однозначно определить достоверность клиента, что бы рассмотреть легитимность действий клиента.
Вероятность достоверности расчета достоверности среды в свою очередь зависит от вероятности возникновения атак, как на среды, так и на канал передачи данных, а вероятность атак зависит от существующих уязвимостей во всех этих компонентах и от вероятностей использования этих уязвимостей злоумышленником, причем эта зависимость нелинейная. Однако на практике довольно сложно точно определить вероятность возникновения атаки, а так же вероятность использования той или иной уязвимости, все эти вероятности обладают погрешностями, и как, очевидно так же погрешностью будет обладать и вероятность достоверности среды. Таким образом, определение погрешности вероятности является важной частью задачи по определению достоверности среды.
190