

УЧЕБНИК САРП100
.pdfНа выходе схемы дифференцирования наблюдаются только передние фронты эхо-сигналов (задние убираются диодами), причем интенсивность наблюдаемых сигналов от целей намного больше.
Схему дифференцирования можно применять также для контрастного изображения только передних отражающих поверхностей протяженных сооружений.
5.3. Метод оптимальной фильтрации сигнала на фоне небелого (коррелированного) стационарного шума и при воздействии помех с сосредоточенным спектром
Ранее было показано, что при белом шуме оптимальный фильтр должен быть согласован со спектром принимаемого сигнала. Если шум небелый и его спектральная плотность N(f) нигде не обращается в нуль, то принимаемый сигнал со спектральной плотностью g(f) должен быть пропущен через дополнительный фильтр с частотной характеристикой Ko(f), который устанавливается на входе согласованного фильтра
K1(f) (рис. 5.14).
Рис. 5.14
Амплитудно-частотная характеристика предварительного фильтра выбирается такой, чтобы спектральная плотность мощности помехи на его выходе не зависела от частоты:
N ( f ) |
|
Ko ( f ) |
|
2 |
= const = C , или |
|
|||||
|
|
|
|||||||||
|
Ko ( f ) |
|
= |
|
C |
. |
(5.1) |
||||
|
|
||||||||||
|
|
|
N ( f ) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Такой фильтр принято называть отбеливающим. Поскольку шум на выходе предварительного фильтра стал
белым, то оптимальная фильтрация сигнала осуществляется с
161

помощью согласованного фильтра K1 ( f ) для сигнала со спектральной плотностью g( f )Ko ( f ) .
Оптимальная частотная характеристика такого фильтра с точностью до постоянного множителя определяется в виде
K1 ( f ) = (g( f )K0 ( f ))* e− j2πft0 , |
(5.2) |
где t0 – задержка фильтра, которая не может быть меньше
длительности сигнала.
В целом оптимальная характеристика из двух фильтров для приема сигнала на фоне небелого шума будет иметь вид
Kопт ( f ) = K0 K1 ( f ) = Ko ( f ) 2 g * ( f )e− j2πto , или
Kопт ( f ) = С |
g * ( f ) |
e |
− j2πft |
0 . |
(5.3) |
N ( f ) |
|
||||
|
|
|
|
|
Если N ( f ) = N0 = const , то получим известное выражение для случая белого шума:
Kопт ( f ) = C1 g * ( f )e− j2πt0 . |
(5.4) |
Полученная обобщенная формула для структуры оптимального фильтра для сигнала на фоне небелого шума позволяет сделать вывод о необходимости режекции помех с сосредоточенным спектром, в частности, синусоидальных помех.
На рис. 5.15 приведен раздельно спектральный состав одиночного радиоимпульса и сосредоточенной помехи, спектр которой намного уже спектра сигнала.
На рис. 5.16 приведена структура оптимального фильтра при воздействии сосредоточенной помехи. В результате режекции теряется часть энергии полезного сигнала, но режектируется мощная сосредоточенная помеха.
162
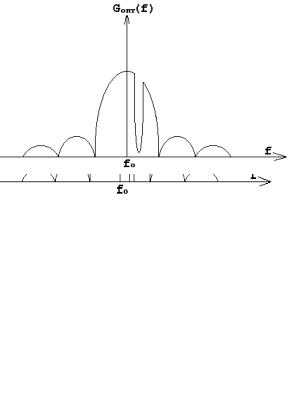
Рис. 5.15
Рис. 5.16
5.4. Метод защиты от взаимных несинхронных помех других РЛС
Несинхронная помеха от других РЛС, как отмечалось выше, отображается на экране РЛС в виде множества целей, расположенных по спирали относительно центра индикатора. Если взаимная помеха синхронна, то спираль преобразуется в окружность.
Несинхронную взаимную помеху можно убрать, используя специальную схему защиты (рис. 5.17).
163
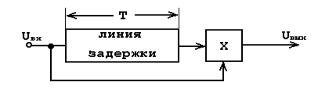
Рис. 5.17
С выхода линии задержки на период следования Т зондирующих импульсов принимаемый сигнал поступает на вход умножителя. На другой вход умножителя подается незадержанный сигнал.
На выходе схемы рис. 5.17 полезный сигнал с периодом следования Т будет присутствовать, а несинхронная взаимная помеха уничтожается, т. к. задержанные импульсы помехи будут перемножаться на нуль.
В цифровых судовых РЛС взаимные несинхронные помехи устраняются методом корреляционной обработки сигналов.
5.5. Метод оптимальной обработки пачки видеоимпульсов с помощью линии задержки
На выходе детектора приемника РЛС цель формирует пачку видеоимпульсов, модулированную по амплитуде диаграммой направленности антенны.
Число импульсов в пачке зависит от угловой скорости вращения антенны, частоты следования зондирующих импульсов, протяженности цели. Предварительную внутриимпульсную фильтрацию импульсов в пачке можно производить в тракте УПЧ приемника путем выбора оптимальной
полосы пропускания fУПЧ =1/τи .
Черезпериодная фильтрация сигналов, отраженных от точечных целей, выполняется на выходе детектора приемника с помощью линии задержки с отводами, число которых М равно числу импульсов в пачке, и сумматора (рис. 5.18).
Необходимость ввода коэффициентов веса на выходе отводов линии задержки (время задержки между отводами равна Т) объясняется тем, что амплитуда видеоимпульсов в пачке
164
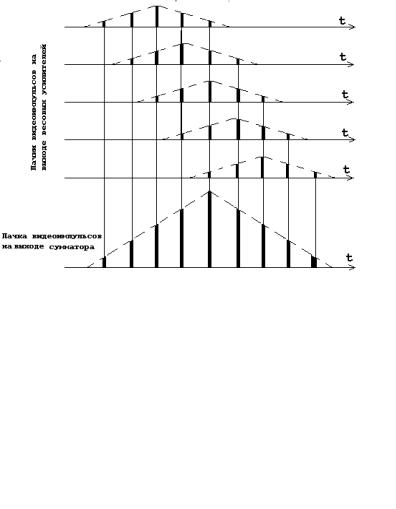
неодинакова. Эпюры видеоимпульсов пачки на выходе весовых усилителей и на выходе сумматора для случая, когда М = 5, приведены на рис. 5.19.
Рис. 5.18
Рис. 5.19
Огибающая пачки на выходе сумматора имеет треугольную форму, как и должно быть в случае согласованной фильтрации.
165
Отметим, что приведенная схема одновременно осуществляет подавление несинхронных взаимных помех.
5.6. Метод оптимальной обработки пачки видеоимпульсов с помощью рециркулятора
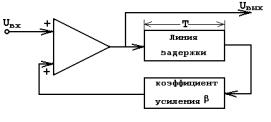
Гребенчатый фильтр накопления, обеспечивающий накопление энергии видеоимпульсов в пачке, может быть построен на основе рециркулятора, структурная схема которого приведена на рис. 5.20.
Рециркулятор включает в себя линию задержки на время Т (Т – период следования импульсов), которая включена в цепь положительной обратной связи.
Рис. 5.20
Коэффициент усиления в цепи обратной связи β<1 . При β>1 схема превращается в генератор периодической последовательности импульсов. Выходное напряжение в схеме рис. 5.20 при β<1 определяется по формуле:
uвых (t) = uвх (t) + βuвх (t −T ) + β 2 uвх (t − 2T ) +.... .
Таким образом, при воздействии на вход рециркулятора импульса на его выходе получаем последовательность периодически следующих импульсов с убывающей амплитудой. Скорость убывания регулируется величиной β . Если на рециркулятор подать пачку видеоимпульсов, то на выходе будет происходить накопление энергии пачки импульсов.
Частотная характеристика рециркулятора имеет вид
K( f ) =1 + βe−2πfT + β 2 e− j4πfT +...
166
Суммируя члены геометрической прогрессии, получим:
|
K( f ) = |
1 |
. |
|
|
||
|
1 − βe− j2πfT |
|
|
||||
Нормированная по амплитуде амплитудно-частотная ха- |
|||||||
рактеристика |
|
|
|
|
|
||
K Н ( f ) = |
|
|
1 − β |
. |
(5.5) |
||
1 + β 2 |
− 2β cos(2πfT − arg β) |
||||||
|
|
|
|||||
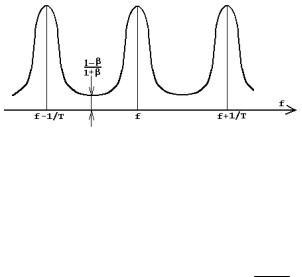
Амплитудно-частотная характеристика рециркулятора имеет гребенчатую структуру (рис. 5.21).
Рис. 5.21
Амплитуда гребней вследствие нормировки равна 1. Меж-
1 − β
ду гребнями располагаются провалы с уровнем 1 + β .
Подбор необходимой ширины гребней и уровней провалов осуществляется путем выбора β.
Для оптимизации фильтрации ширину гребней амплитуд- но-частотной характеристики следует согласовать с шириной гребней амплитудно-частотного спектра пачки импульсов.
5.7. Метод цифрового бинарного накопления пачки видеоимпульсов
Широкое применение в цифровых методах обработки сигналов нашли бинарные схемы накопления или, иначе, схемы счета числа импульсов, превышающих заданный порог.
167
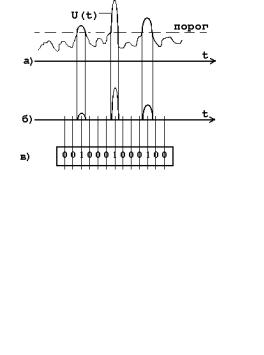
На рис. 5.22а показано напряжение u(t) на выходе детек-
тора, которое подается на пороговую схему, уровень порога которой показан пунктиром. Выходное напряжение квантуется по времени и амплитуде (рис. 5.22б), так что на выходе создается дискретная последовательность нулей и единиц (рис. 5.22в).
На рис. 5.23а приведены зафиксированные последовательности нулей и единиц на 13 дискретах дальности для четырех последовательно излучаемых зондирующих импульсов.
Рис. 5.22
Рис. 5.23
Последовательности запоминаются после каждого зондирующего импульса в устройстве цифровой обработки. В качестве запоминающего устройства может быть использован регистр дальности.
168
Последовательности на рис. 5.23а расположены в виде строк друг над другом. Каждой строке соответствует новое значение азимута (по вертикали).
Каждая вновь полученная последовательность записывается на месте предыдущей последовательности, остальные последовательности – в промежуточные регистры (смещаются вниз). Наиболее старая (нижняя) последовательность отбрасывается, так что в устройстве обработки все время запоминается одно и то же количество последовательностей m (в рассматриваемом случае m = 4), а для каждого квантованного элемента дальности – одно и то же количество m двоичных цифр. С учетом пропуска отдельных импульсов из-за помех решение о наличии цели принимается, если зафиксировано n и более импульсов из m возможных (используется логика «3 из 3», «2 из 2», «4 из 4» и т. д.). На рис. 5.23 принята логика «3 из 4». На рис.5.23б приведено записанное число единиц в четырех регистрах на каждом дискрете дальности. На рис. 5.23в с помощью логики «3 из 4» цель зафиксирована лишь на 7-ом дискрете дальности.
Для получения наилучших показателей схемы обнаружения цели целесообразно число m выбрать равным числу М импульсов в пачке. Так, если число импульсов в пачке равно 10, то необходимо использовать 10 регистров промежуточного результата. Длина каждого регистра может составлять 500 и более бит.
Полная схема цифровой обработки по рассматриваемому принципу изложена в гл. VI.
169
Контрольные вопросы
1.Как отображаются на экране РЛС несинхронные и синхронные взаимные помехи от других РЛС, эхо-сигналы от взволнованной морской поверхности, от гидрометеоров: дождя, снега, града?
2.Почему ложные цели наиболее часто появляются от близко проходящих судов?
3.Почему приводные волноводы могут явиться причиной появления ложных целей?
4.Назовите методы борьбы с помехами от взволнованной морской поверхности, от гидрометеоров.
5.Какова должна быть структура оптимального фильтра в приемнике РЛС при воздействии мощных помех с сосредоточенным спектром?
6.Назовите три возможных метода черезпериодной обработки импульсов в одной пачке.
170