

УЧЕБНИК САРП100
.pdfТакая обработка носит название обработки в «движущемся окне», а каждый параллельный канал называется обнаружителем движущего окна.
При перемещении луча по азимуту обработка в окне ведется непрерывно на всех азимутах. Ширина «движущегося окна» соответствует ширине антенного луча в азимутальной плоскости.
При известных параметрах сигнала и шума по взятой выборке Ui вычисляется отношение:
WC,N (U i ) |
|
|
|
||
l = |
|
, |
|
|
(4.6) |
W N (U i ) |
|
|
|||
где WC,N (Ui ) – условная плотность вероятности выборки, если |
|||||
она взята из смеси сигнала и шума; W |
N ( |
i ) |
– условная плот- |
||
U |
|
||||
ность вероятности выборки, если она взята из шума.
Отношение l = |
WC,N (U i ) |
принято называть отношением |
W N (U i ) |
функции правдоподобия.
Правило принятия решения о наличии или отсутствии сигнала во взятой выборке следующее:
сигнал есть, если
сигнала нет, если
WC,N (U i ) |
≥ l0 ; |
(4.7) |
W N (Ui ) |
||
WC,N (Ui ) |
<l0. |
|
W N (Ui ) |
|
Если значение порога l (рис. 4.4) выбрать излишне большим (l = l1), то возрастает вероятность пропуска сигнала 1–D; если излишне малым (l = l2), то увеличится вероятность ложного обнаружения сигнала F.
131
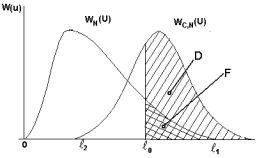
Рис. 4.4
Величина оптимального порога l0 выбирается, исходя из требуемой вероятности обнаружения сигнала D, которая на рис. 4.4 определяется величиной заштрихованной площади под
кривой распределения WC,N (U ), а вероятность ложного обнаружения сигнала F – величиной заштрихованной площади под кривой распределения W N (U ).
Рабочий алгоритм обнаружения отраженной от цели пачки импульсов в «движущемся окне» разработан для двух статистических моделей сигналов:
•пачки нефлюктуирующих импульсов;
•пачки независимо флюктуирующих по закону Релея
амплитуд импульсов с дисперсией σN2 .
Первая модель в основном соответствует точечным целям, вторая модель – дисперсным протяженным целям.
Оптимальный алгоритм обнаружения пачки отраженных импульсов от точечных целей
Выборка U i из принимаемой смеси сигнала с шумом для
точечной цели на выходе детектора (при отсутствии флюктуаций отражающей поверхности) описывается обобщенным законом Релея с плотностью распределения вероятности
132

|
|
|
|
U i |
|
|
2 |
|
2 |
|
|
U i U C,i |
|
|||
W |
U |
i ) |
|
|
|
U i |
|
+U C,i |
I |
|
||||||
= |
|
exp |
− |
|
|
|
|
|
|
|
|
, Ui>0. (4.8) |
||||
σN2 |
|
2σN2 |
|
|
σN2 |
|||||||||||
C,N ( |
|
|
|
|
|
|
0 |
|
|
|
||||||
Из-за модуляции амплитуды импульсов диаграммой направленности антенны UC,i = UC,maxGi, где Gi – весовые
коэффициенты, зависящие от формы диаграммы направленности антенны, UC,max – амплитуда сигнала в максимуме диаграммы направленности.
Выборки U i из шума (при отсутствии сигнала) подчиняются закону Релея:
|
|
|
|
|
|
|
Ui |
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
|
|
WN (Ui )= |
|
|
|
|
− |
Ui |
|
|
|
(4.9) |
|||||||||||
|
|
2 |
|
|
2 |
|
|
||||||||||||||||
|
|
|
exp |
|
. |
|
|||||||||||||||||
|
|
|
|
|
|
|
σN |
|
|
|
|
2σN |
|
|
|
|
|||||||
Введем обозначения: ui = |
|
Ui |
|
|
– относительная амплитуда |
||||||||||||||||||
σ |
N |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
U |
C,i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
|
|||
огибающей; q |
i |
= |
|
|
– отношение сигнал – шум; k 2 |
= |
i |
|
– |
||||||||||||||
|
|
|
σN2 |
||||||||||||||||||||
|
|
|
σ N |
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
||||||
отношение дисперсии амплитуды сигнала к дисперсии шума. |
|
||||||||||||||||||||||
Тогда распределения вероятности запишутся в виде |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
||
WC,N (ui )= ui exp |
− |
ui |
+ qi |
I0 (ui qi ), |
|
|
|
|
|||||||||||||||
|
2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
WN (ui )= ui exp − u2i2 .
Функция правдоподобия представится в виде
WC,N (ui ) |
|
|
q2 |
|
(ui qi ). |
|
|
|
|
|
− |
i |
|
(4.10) |
|
|
|
|
|||||
WN (ui ) |
= exp |
2 |
I0 |
||||
|
|
|
|
|
|||
При приеме пачки импульсов отношение правдоподобия имеет вид
133

N |
|
2 |
|
|
|
|
ln = II exp |
− |
qi |
I0 |
(ui qi ). |
(4.11) |
|
|
||||||
i=1 |
|
2 |
|
|
|
|
Решениеоналичиисигналаво взятойвыборкепринимается, ес-
ли
N |
|
2 |
|
|
|
II exp |
− |
qi |
I0 |
(ui qi )≥ l0 . |
|
|
|||||
i=1 |
|
2 |
|
|
|
После логарифмирования и преобразования получим
N |
N |
2 |
|
|
∑ln I0 |
(ui qi )≥ ln l0 + ∑ |
qi |
. |
|
2 |
||||
i=1 |
i=1 |
|
Для случая слабых сигналов ( qi <<1 )справедливо соот-
ношение:
ln I0 (ui qi )= ui q4i2 .
С учетом того, что qi2 = Gi2 qmax2 , алгоритм обнаружения слабых сигналов будет следующий:
N |
|
4 ln |
l |
|
|
|
|
|
N |
|
|
∑Gi2 qi2 ≥ Ζ , где Ζ = |
0 |
|
+ 2qmax2 ∑Gi2 . |
(4.12) |
|||||||
2 |
|
|
|
|
|||||||
i=1 |
|
qmax |
|
|
|
|
|
i=1 |
|
||
Для случая сильных |
сигналов |
|
|
( |
|
qi |
>>1 ) справедливо |
||||
ln I0 (ui qi )≈ ui qi . Тогда алгоритм обнаружения сильных сиг- |
|||||||||||
налов будет: |
|
|
|
|
|
|
|
|
|
|
|
N |
|
lnl 0 |
|
|
|
|
qmax |
N |
|
||
∑Gi qi ≥ Ζ′, где Ζ′ = |
|
+ |
∑Gi2 . |
(4.13) |
|||||||
qmax |
|
||||||||||
i=1 |
|
|
|
2 |
|
i=1 |
|
||||
Таким образом, для обнаружения пачки импульсов с известными параметрами, амплитуда которых модулирована диаграммой направленности антенны, оптимальный алгоритм сводится к весовому суммированию нормированных выборок
134

сигналов на выходе квадратичного или линейного детектора в пределах ширины пачки и сравнению накопленной суммы с порогом.
Оптимальный алгоритм обнаружения пачки отраженных импульсов от дисперсных протяженных целей
Для дисперсных протяженных целей распределение вероятности мгновенных значений отраженных сигналов и шума подчиняется нормальному распределению вероятности на входе детектора приемника и релеевскому распределению – на выходе детектора. Распределение вероятности смеси сигнала с шумом на выходе детектора имеет такой вид:
|
|
|
U i |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
WC,N (U i )= |
|
|
|
|
|
− |
|
|
U i |
|
|
|
|
|
|
|
, |
|
(4.14) |
||||||
|
2 |
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|
||||||||||||
|
|
|
exp |
|
|
|
|
|
|
|
|
||||||||||||||
|
σC |
+σN |
|
|
|
2(σC +σN ) |
|
|
|
|
|
|
|||||||||||||
где σC2 – дисперсия сигнала. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Распределение вероятности шума на выходе детектора |
|
|
|
||||||||||||||||||||||
|
|
|
|
U i |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WN (ui ) |
= |
|
|
exp − |
Ui |
. |
|
|
|
|
|
|
|
|
|
|
(4.15) |
||||||||
σN2 |
2σN2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
С учетом введенных ранее обозначений u |
i |
= |
|
U i |
, |
q = |
σC |
|
|||||||||||||||||
|
σ |
N |
σ |
N |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
справедливо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ui |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WC,N (ui )= |
|
|
|
|
− |
|
ui |
|
|
|
|
, |
|
|
|
|
|
|
|
|
|||||
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||
1 + q |
exp |
|
2(1 + q |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
||||||
WN (ui )= ui exp − u2i2 .
Функцию правдоподобия получим в следующем виде:
135

WC,N (ui ) |
|
|
|
1 |
u2 q2 |
|
|||
|
= |
|
|
|
exp |
i |
|
. |
(4.16) |
WN (ui ) |
|
|
+ q2 |
|
|
||||
|
1 |
|
|
2 |
|
||||
Алгоритм оптимального обнаружения пачки импульсов
N |
1 |
|
|
2 |
q |
2 |
|
|
|
II |
|
exp |
ui |
|
|
≥ l0 . |
(4.17) |
||
1 + q |
2 |
2 |
|
||||||
1 |
|
|
|
|
|
|
|||
После ряда преобразователей получим алгоритм обнаружения сигнала:
∑N U i2 ≥ q22 (ln l0 + N(1 + q2 )).
1
Вероятность правильного обнаружения сигнала при релеевском распределении смеси сигнала и шума на выходе детектора будет
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
D = exp |
− |
|
uпор |
|
|
|
|
, |
(4.18) |
||
|
|
|
( |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 |
) |
|
|
|||
|
|
|
|
|
2 1 + q |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
U пор |
|
|
|
|
|
|
|
|
|
|
|
|
||
где uпор = |
|
|
– нормированная величина порога. |
|
||||||||||
σ |
N |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вероятность ложного обнаружения сигнала при релеев- |
||||||||||||||
ском распределении шума |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
uпор |
|
|
||||
|
|
|
F = exp |
− |
|
2 |
|
|
. |
|
(4.19) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если uпо2 р = 9 ; q = 25, то D = 0,85; F = 0,01.
Для дисперсных протяженных целей оптимальный алгоритм сводится к суммированию нормированных выборок сигналов на выходе квадратичного детектора в пределах ширины пачки и сравнению накопленной суммы с порогом.
136

Так как сумма квадратов выборок пропорциональна дисперсии, то можно сказать, что измеряется дисперсия анализируемого процесса и сравнивается с порогом.
В реальных условиях работы величины параметров Ui , σN являются неизвестными. Поэтому системы автоматического обнаружения сигналов и вероятности D, F рассчитывают, исходя из ожидаемого наихудшего отношения сигнал – шум. Разные распределения вероятности мгновенных значений отраженных сигналов от точечных и протяженных целей приводят к повышенным ошибкам обнаружения точечных целей вблизи протяженных целей.
4.3. Оптимальная оценка измерения дистанции при различных формах зондирующих импульсов
Для радиолокации важно знать, как зависит среднеквадратическая величина погрешности измерения временного положения сигнала от энергии и формы зондирующего сигнала. Погрешность измерения дистанции до цели оценивается этой погрешностью.
На выходе оптимального фильтра внутриимпульсной обработки форма огибающей сигнала зависит от частотного спектра (и формы) входного сигнала. На рис. 4.5 (справа) представлены формы огибающих импульсных сигналов на выходе оптимальных фильтров для трех форм спектров входных сигналов. Спектры входных сигналов на рис. 4.4 приведены слева.
На рис. 4.5а представлен амплитудно-частотный спектр прямоугольной формы, который соответствует импульсному сигналу с линейной частотной модуляцией несущей частоты.
На рис. 4.5б приведен амплитудно-частотный спектр колокольной формы, соответствующий колокольной форме огибающей импульсного сигнала.
На рис. 4.5в спектр вида sinx x соответствует прямоуголь-
ной форме огибающей импульса.
Спрашивается, какая из трех приведенных форм спектров, соответствующих трем разным формам импульсам, будет
137
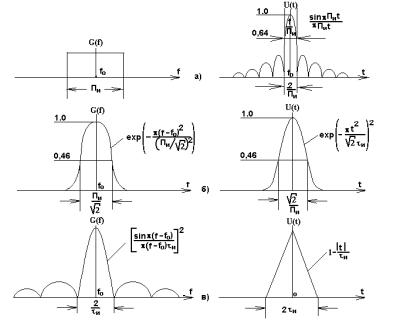
обеспечивать наименьшую погрешность измерения дистанции (при одинаковой энергии импульсов)?
Рис. 4.5
При бинарном квантовании огибающей сигнала на выходе детектора приемника значение порогового напряжения U пор вы-
бирается примерно равным половине амплитуды импульса. На выходе порогового ограничителя выходной импульс представляется частью огибающей импульса в районе вершины U (t)
(рис. 4.6а), где t опт – наиболее правдоподобная оценка временного положения сигнала. Значение tопт определяется моментом
перехода через нуль дифференцированной части огибающей в районе вершины (рис. 4.6б).
138
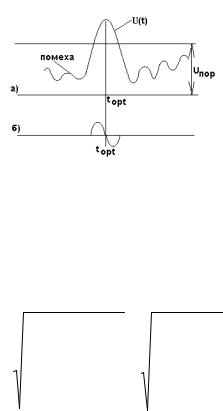
Рис. 4.6
Анализ показал, что оптимальная среднеквадратическая оценка погрешности στ измерения временного положения им-
пульса в районе вершины определяется выражением
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
στ = |
|
|
, |
|
|
|
|
|
|
|
|
|
(4.20) |
|||||
|
|
|
qПэф |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
∞ |
|
|
|
∞ |
|
|
|
|||||||||||||||
где П |
|
|
∫ f 2 |
|
G( f ) |
|
2 df |
|
|
|
∫ |
|
u′(t) |
|
2 dt |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
эф |
= 2π |
−∞ |
= |
|
−∞ |
|
|
; |
|||||||||||||||||
∞ |
|
∞ |
2 |
||||||||||||||||||||||
|
|
|
∫ |
|
G( f ) |
|
2 df |
|
|
|
∫ |
|
u(t) |
|
dt |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
−∞ |
|
|
|
−∞ |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
(4.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пэф – эффективная нормированная ширина частотного
спектра входного сигнала;
u′(t) – производная формы огибающей выходного сиг-
нала.
Из приведенного выражения можно сделать важный вывод, что погрешность измерения временного положения сигнала при данном уровне шума обратно пропорциональна отношению сигнал/шум (q) на выходе оптимального фильтра
и эффективной ширине спектра ( Пэф ). Таким образом, по-
139
грешность измерения зависит не только от энергии, но и от формы входного сигнала.
Для колокольного радиоимпульса Пэф = |
π |
, |
где τи – |
||
τ |
|||||
|
|
|
и |
|
|
длительность импульса на уровне 0,46, получим |
|
||||
στ = |
τи |
. |
(4.22) |
||
|
|||||
|
πq |
|
|||
Если q = 8, τи = 0,3 мкс, то στ = 0,02 мкс.
Для сигнала с прямоугольным спектром, ширина которого Пи , получим:
σ |
τ |
= |
3 |
. |
(4.23) |
|
|||||
|
|
πqПи |
|
||
Для сигнала с прямоугольной формой огибающей длительностью τи –
στ |
= |
τи 2 |
. |
(4.24) |
|
||||
|
|
q2 |
|
|
При измерении временного положения пачки импульсов в приведенных выше выражениях величина отношения сигнал – шум определяется с учетом суммарной энергии пачки импульсов.
4.4. Оптимальная оценка измерения пеленга
Главный лепесток диаграммы направленности антенны РЛС в азимутальной плоскости аппроксимируется выражением
F(ϕ) = e−π αϕг 2 ,
где ϕ (град) – значение азимута, αг (град) – ширина диаграм-
мы направленности по уровню 0,46 (она мало отличается от ширины по половинной мощности).
140