

6. Оценка эффективности и своевременности маневров
Количественных критериев для оценки эффективности и своевременности маневров судов до последнего времени не существовало, и такие оценки не производились. Показателем эффективности маневров скоростью может быть величина сокращения (уменьшения) расстояния AS, которая может быть получена в результате его производства
ΔS = S1 – S2,
где S1 - путь, который прошло бы судно, если бы маневр не производился;
S2 - путь, который прошло судно во время маневра.
Критерий оценки эффективности маневра по сокращению расстояния в этом случае может быть определен по формуле:
Kp = (l – S2/S1).
Вторым критерием эффективности маневра по сокращению скорости может быть величина, определяемая по формуле
Кс = (1- Vк/ Vн),
где Vн – скорость в начале маневра;
Vк – скорость в конце маневра.
Результаты расчетов по оценке эффективности маневров т/х «Петр Васев» сведены в таб. 2.
Таблица 2
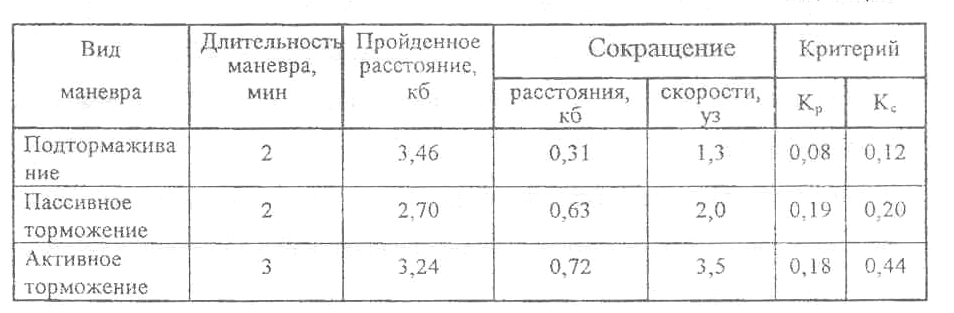
Как видно из приведенных данных, критерии, показывающие эффективность маневра скоростью на крупнотоннажных судах, имеют малое значение. Каждый последующий маневр давал сокращение расстояния менее 1 кб, а сокращение скорости составляло от 1,3 до 3,5 уз. Оценку эффективности маневров п/х «Адмирал Нахимов» при поворотах на малые углы произведем по величине расстояния ΔД, на которое перемещалось судно в результате этих маневров, в сторону от грозящей опасности (т/х «Петр Васев»). В результате первого отворота на 5° с 23.06 до 23.07 п/х «Адмирал Нахимов» переместился от линии пути на ΔД1 = S2sin 5°, ΔД1 = 0,14 кб; второго отворота на 5°с 23.07 до 23.09 – ΔД2= 0,28 кб; третьего отворота на 10° с 23.09 до 23.11-ΔД3=0,54 кб. Маневры п/х «Адмирал Нахимов» были приблизительно в два раза менее эффективны по сравнению с маневрами т/х «Петр Васев». Общее смещение, которое получил п/х «Адмирал Нахимов» в сторону от опасности за 5 мин, составляло 0,96 кб, т.е. менее 1 кб. Можно сделать вывод: судоводители могли применить перечисленные маневры, лишь не располагая априорной информацией об их малой эффективности. Оценку своевременности производимых судоводителями маневров, направленных на предотвращение столкновения судов, будем производить по двум величинам: по времени запаздывания начала маневра и по величине ошибки в определении расстояния между судами для начала маневра, равной разности расстояния между судами, с которых начинались эти маневры, и безопасными дистанциями между судами, с которых должны быть начаты эти маневры.
Оперативное время, когда эти дистанции между судами имели место, можно определить, воспользовавшись формулами (5.1) и (5.2). Из квадратного уравнения, полученного из этих формул, определяем оперативное время по формуле

При Д = 5 м.м, t = 10 мин; при Д = 4 м.м, t = 13 мин; при Д = 3 м.м, t = 16 мин.
Судовое время будет равно
tс.в. = 22/47 + t... .
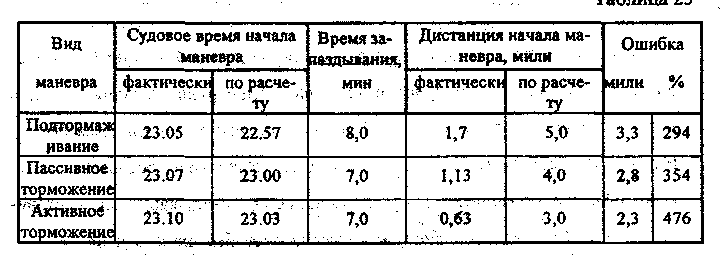
Произведенные расчеты показали, что маневр подтормаживания нужно было начать по судовому времени в 22.57, маневры пассивного торможения - в 23.00, активного торможения -в 23.03.
Расчетные данные по оценке своевременности маневров скоростью т/х «Петр Васев» приведены в табл. 3.
Таблица 3.
Результаты определения фактических дистанций между судами, с которых начинались маневры, определены и показаны на рис. 6.
Большое время запаздывания маневров (7-8 мин) и ошибка в 3-4 и более раза в определении дистанций для начала маневров скоростью свидетельствует о том, что капитан т/х «Петр Васев» не располагал информацией о безопасных дистанциях между судами для начала маневра и не был обучен методам их определения. Дистанция между судами, с которой п/х «Адмирал Нахимов» начал маневр последнего момента, составляла 2 кб (см. рис. 6).
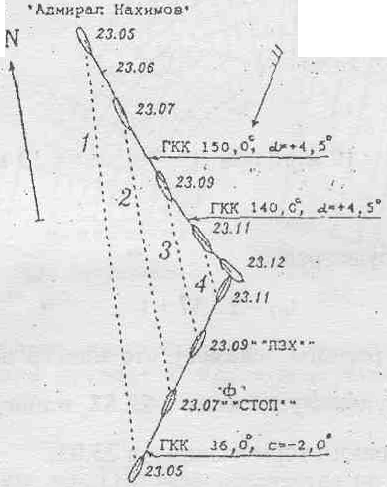
Рис. 6. Дистанции между судами, с которых начинались маневры
1-Д = 17,0 кб, ИП = 3,0°; 2 - Д – 11,3 кб, ИП = 359,0°; 3-Д- 6,3 кб, ИП - 355,0°; 4 –Д - 2,0 кб, ИП = 349,0°
Минимальная дистанция между судами, на которой можно было предотвратить столкновение судов путем перекладки руля на левый борт, в данном случае составляла 5,3 кб. Ошибка в оценке дистанции для начала маневра последнего момента у п/х «Адмирал Нахимов» составила 2,3 кб, или 256%, т.е. более чем в 2,5 раза; по времени запаздывания она составила 2,5 мин. Маневр последнего момента должен был начаться не позднее 23.05 по судовому времени. Вахтенный помощник капитана на п/х «Адмирал Нахимов» также не располагал информацией о безопасных дистанциях для начала маневра на предупреждение столкновения судов. Научно обоснованный метод для определения величин этих дистанций в средних и высших учебных заведениях и на курсах повышения квалификации судоводителей не изучается (за исключением НГМА).
7. Обеспечение безопасного расхождения судов манером скоростью с использованием ПЭВМ
Маневр скоростью для предупреждения столкновения судов является одним из наиболее сложных маневров для крупнотоннажных судов по двум факторам: безопасные дистанции между судами, с которых должен начинаться маневр у крупнотоннажных судов, очень велики и достигают при расхождении с высокоскоростными судами 15-20 миль и более, длительность маневра от его начала до окончания расхождения может достигать 30 мин и более. Редкое применение маневра в сочетании с вышеизложенными обстоятельствами приводят при определении дистанций для начала маневра к очень большим ошибкам, достигающим 300-400 % от величин безопасных дистанций, и как результат к столкновению судов.
При расхождении крупнотоннажных судов в море одним из важных факторов для предупреждения столкновений судов является правильный выбор дистанции для начала маневра.
В соответствии с хорошей морской практикой дистанция между крупнотоннажными судами, с которой определяется наличие угрозы столкновения судов путем пеленгования встречного судна составляет от 6 до 12 и более морских миль.
Решение проблемы состоит в создании математической модели расхождения судов и ее реализации на мостике с помощью ПЭВМ.
В работе А. И. Зеленков. Рекомендации судоводителю по выбору угла отворота. М.:«Судовождение, связь и безопасность мореплавания», вып.11(366),1999.дано теоретическое обоснование и разработаны практические рекомендации по выбору угла отворота при расхождении с судном, приближающимся на курсовом угле правого борта, с использованием данных САРП и созданной авторами номограммы.
Рекомендации по выбору дистанций для начала маневра скоростью и вида маневра (подтормаживание, пассивное торможение, активное торможение) с помощью номограммы содержится в работе С. Б. Ольшамовский. Повышение безопасности мореплавания. НГМА, 2000,.
К недостаткам решения задач расхождения с помощью номограмм следует отнести: ограниченный диапазон применения, сравнительно невысокая точность решения задачи, наличие у судоводителя навыков при их использовании и др.
По нашему мнению, в настоящее время при наличии на всех крупнотоннажных судах ПЭВМ и широком их использовании судоводителями для решения эксплутационных задач назрела необходимость применения вычислительной техники для решения следующих задач маневрирования: расхождение судов, разработка программ и предварительной прокладки перехода проливов, узкостей, акваторий портов с учетом динамических качеств судна и др. Остановимся на решении задачи с использованием ПЭВМ по выбору дистанции для начала маневра скоростью, уступающим дорогу судном, когда по тем или иным условиям плавания применение более эффективного маневра курсом невозможно или нецелесообразно.
Безопасная дистанция между судами (Дб),
с которой следует начинать маневр
скоростью, зависит от динамических
качеств судна и вида маневра, разности
курсов (![]() ),
скорости нашего судна (
),
скорости нашего судна (![]() н),
скорости судна-цели (
н),
скорости судна-цели (![]() ц)
и определяется по формуле (2).
ц)
и определяется по формуле (2).
![]() . (7.1)
. (7.1)
Определение величин vн,
vц,
![]() не представляет затруднений. Они могут
быть сняты с экрана САРПа. Здесь
не представляет затруднений. Они могут
быть сняты с экрана САРПа. Здесь![]() – разность между курсом нашего судна
(Кн)
и курсом цели (Кц):
– разность между курсом нашего судна
(Кн)
и курсом цели (Кц):
![]() ,
,
vн – скорость нашего судна;
vц– скорость судна-цели;
![]() –
время маневра или время от начала маневра
до момента пересечения курса нашего
судна с судном-целью, т.е. до окончания
расхождения.
–
время маневра или время от начала маневра
до момента пересечения курса нашего
судна с судном-целью, т.е. до окончания
расхождения.
С физической точки зрения
![]() –
это время, за которое расстояние до
точки пересечения курсов в результате
маневра уменьшается на величину
–
это время, за которое расстояние до
точки пересечения курсов в результате
маневра уменьшается на величину![]() мор. миль – в прибрежном плавании или
мор. миль – в прибрежном плавании или![]() мор. миль – в открытом море заданной
судоводителем дистанции на расхождение.
мор. миль – в открытом море заданной
судоводителем дистанции на расхождение.
Для определения
![]() строятся три графика разности дистанций
при отсутствии маневра
строятся три графика разности дистанций
при отсутствии маневра![]() и дистанции при наличии маневра
и дистанции при наличии маневра![]() – для маневров подтормаживания
(уменьшения скорости), пассивного и
активного торможения.
– для маневров подтормаживания
(уменьшения скорости), пассивного и
активного торможения.
![]() , (7.2)
, (7.2)
где
![]() –
разность дистанций между путем, пройденным
нашим судном на постоянной скорости за
время
–
разность дистанций между путем, пройденным
нашим судном на постоянной скорости за
время![]() ,
и путем, пройденным нашим судном за
время
,
и путем, пройденным нашим судном за
время![]() при
маневре уменьшения скорости;
при
маневре уменьшения скорости;![]() –
путь, проделанный нашим судном на
постоянной скорости
–
путь, проделанный нашим судном на
постоянной скорости![]() за
время
за
время![]() ;
;![]() –
путь, пройденный нашим судном за время
–
путь, пройденный нашим судном за время![]() при маневре скоростью.
при маневре скоростью.
При уменьшении скорости от
![]() до малого (или самого малого хода) функция
до малого (или самого малого хода) функция![]() имеет
вид
имеет
вид
 , (7.3)
, (7.3)
где![]() – функция для определения пройденного
пути при уменьшении оборотов двигателя
до малого хода;
– функция для определения пройденного
пути при уменьшении оборотов двигателя
до малого хода;![]() –
установившаяся скорость, до которой
снижаются обороты двигателя;
–
установившаяся скорость, до которой
снижаются обороты двигателя;![]() – время;а– инерционный параметр,
который определяется по результатам
натурных испытаний судна или по формуле
маневренных качеств судна:
– время;а– инерционный параметр,
который определяется по результатам
натурных испытаний судна или по формуле
маневренных качеств судна:
 , (7.4)
, (7.4)
где
![]() – это промежуток времени (4-5 мин), за
который скорость после остановки
двигателя (пассивном торможении)
снизилась от
– это промежуток времени (4-5 мин), за
который скорость после остановки
двигателя (пассивном торможении)
снизилась от![]() до
до![]() ;
;
здесь:
![]() –
время начала наблюдения;
–
время начала наблюдения;![]() –
время окончания наблюдения;
–
время окончания наблюдения;
![]() – скорость в начале наблюдения;
– скорость в начале наблюдения;![]() –
скорость во время окончания наблюдения.
–
скорость во время окончания наблюдения.
По результатам трех-четырех значений
величин
![]() определяем среднее значение:
определяем среднее значение:
![]() ,
,
![]() – определяются в начале, середине и
конце маневра.
– определяются в начале, середине и
конце маневра.
При отсутствии натурных данных инерционный параметр можно определить по формуле
![]() , (7.5)
, (7.5)
где
![]() –
масса судна; кгсс2/м;
–
масса судна; кгсс2/м;![]() – коэффициент присоединений массы
воды;
– коэффициент присоединений массы
воды;![]() ;
;![]() –
коэффициент полноты мидельшпангоута,
–
коэффициент полноты мидельшпангоута,
![]() –
ширина судна, м;
–
ширина судна, м;![]() –
осадка судна, м.
–
осадка судна, м.
В табл. 7.1 приведены значения инерционных параметров для крупнотоннажных танкеров различного водоизмещения.
Таблица 7.1.
|
Характеристики судна |
Значение
м | |||
|
Водоизмещение, тонны |
Длина, м |
Ширина, м |
Осадка, м | |
|
272 000 |
334 |
51 |
19,6 |
4 400 |
|
180 000 |
295 |
46 |
17,5 |
4 000 |
|
130 000 |
250 |
38 |
11,8 |
3 800 |
|
85 000 |
228 |
32,2 |
13,6 |
3 500 |
На рис. 7 показана схема расхождения крупнотоннажных судов на пересекающихся курсах при маневре изменения оборотов двигателя с полного на малый ход.
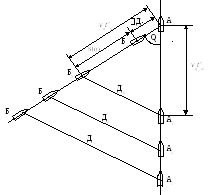
Рис. 7. Схема расхождения крупнотоннажных судов на пересекающихся курсах при маневре скоростью
![]() –
положения судна А
–
положения судна А
![]() –
положения судна В
–
положения судна В
При пассивном торможении функция
![]() имеет вид:
имеет вид:
![]() , (7.6)
, (7.6)
![]() – функция пройденного пути после
остановки двигателя.
– функция пройденного пути после
остановки двигателя.
При активном торможении формула
![]() приобретает вид
приобретает вид
![]() , (7.7)
, (7.7)
![]() – функция пройденного пути при работе
двигателя на задний ход, при
– функция пройденного пути при работе
двигателя на задний ход, при![]() ,
,![]() .
.
Здесь
![]() – инерционный параметр при активном
торможении движителем определяется из
выражения
– инерционный параметр при активном
торможении движителем определяется из
выражения
![]() , (7.8)
, (7.8)
где
![]() время
до полной остановки судна;
время
до полной остановки судна;
![]() время
после команды о реверсе двигателя до
начала изменения скорости хода судна
время
после команды о реверсе двигателя до
начала изменения скорости хода судна![]() 30-60
с.
30-60
с.
В формуле (7.7) время измеряется в минутах,
скорость судна – в уз, инерционный
коэффициент
![]() =(0,7-0,8)
=(0,7-0,8)![]() ,
пройденный путь
,
пройденный путь![]() –
в милях.
–
в милях.
Для определения времени маневра
![]() построим графики
построим графики![]() ,
,![]() и
и![]() для трех маневров по формулам (2,3,6,7), для
чего воспользуемся системойMathcad,
ее новейшей версиейMathcad2001Professional(илиPRO).
для трех маневров по формулам (2,3,6,7), для
чего воспользуемся системойMathcad,
ее новейшей версиейMathcad2001Professional(илиPRO).
Процесс построения графиков в системе
Mathcadполностью автоматизирован.
В новом открытом файле, с помощью
клавиатуры набираются формулы, а затем
под ними – константы и диапазон изменения
аргумента![]() ,
одновременно для маневров подтормаживания
,
одновременно для маневров подтормаживания![]() и пассивного торможения
и пассивного торможения![]() .
.
Так как размерность в выражениях
![]() и
и![]() одинакова, программа позволяет строить
графики одновременно и получить их
значение на одном поле.
одинакова, программа позволяет строить
графики одновременно и получить их
значение на одном поле.
Порядок построения двухмерных графиков
в прямоугольных координатах рассмотрим
на примере танкера 180 000т. идущим со
скоростью полного маневренного хода
![]() =12
уз (6 м/с),
=12
уз (6 м/с),
Для маневра уменьшения скорости от
полного маневренного хода
![]() м/с
(12 уз) до малого хода
м/с
(12 уз) до малого хода![]() м/с
(6 уз):
м/с
(6 уз):
 ;
;
![]() м/с;
м/с;![]() м/с;
м/с;![]() м;
м;![]() с.
с.
Для маневра пассивного торможения:
![]()
![]()
![]() м/с;
м/с;![]() м;
м;![]() с.
с.
Затем входим в опцию «график» и выводим
на экран типы графиков: двухмерный
график в прямоугольных координатах,
двухмерный график в полярных координатах,
трехмерный график и т. д. Выбрав двухмерный
график в прямоугольных координатах и
сделав на нем щелчок левой кнопкой мыши,
получаем формат графика. На оси абсцисс
наносим аргумент «t»
и пределы его изменения, а на оси ординат
функции![]() и
и![]() ,
затем после второго щелчка мышкой
получаем графики, показанные на рис.8.
Для их построения используем формулы
,
затем после второго щелчка мышкой
получаем графики, показанные на рис.8.
Для их построения используем формулы
![]() ,
,![]() ,
,![]() м,
м,![]() ,
,![]() ,
,
 ,
,
![]() ,
,![]() ,
,![]() ,
,
![]() .
.
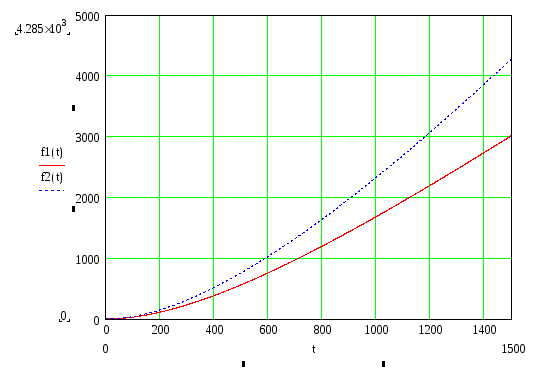
Рис. 8. Графики для определения времени маневра tм
Аналогично был построен и график для
маневра активного торможения изменения
функций
![]()
![]() и
и![]() (рис.9), на которых аргумент
(рис.9), на которых аргумент![]() –
в минутах, а значение функции – в милях.
Для построения этих графиков были
использованы следующие формулы
–
в минутах, а значение функции – в милях.
Для построения этих графиков были
использованы следующие формулы
![]() ,
,![]() ,
,![]() ,
,
![]() ,
,
![]() ,
,![]() .
.
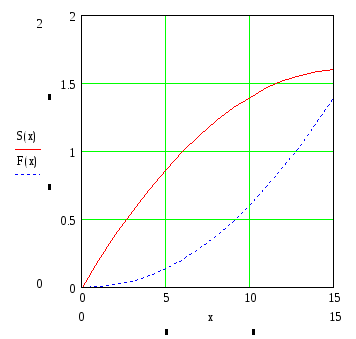
Рис. 9. Графики для определения времени маневра tм
По графикам функций
![]() ,
,![]() и
и![]() для выбранной судоводителем дистанции
в конце расхождения судов определяем
время маневров
для выбранной судоводителем дистанции
в конце расхождения судов определяем
время маневров![]() .
Для дистанции
.
Для дистанции![]() в 1 милю для танкера водоизмещением
180000т проводим линию, параллельную оси
абсцисс, до пересечения с соответствующей
кривой и получаем:
в 1 милю для танкера водоизмещением
180000т проводим линию, параллельную оси
абсцисс, до пересечения с соответствующей
кривой и получаем:
![]() =1144
с=19,1 мин;
=1144
с=19,1 мин;
![]() =862
с=14,4 мин;
=862
с=14,4 мин;
![]() =816
с=13,6 мин.
=816
с=13,6 мин.
Более точным и быстрым способом
определения
![]() является проведение по формулам
является проведение по формулам![]() ,
,![]() и
и![]() расчетов, назначив определенный шаг
для времени (например,
расчетов, назначив определенный шаг
для времени (например,![]() с),
и в файле с набранными формулами нажать
знак «=» (равно). В результате получим
таблицу значений функций
с),
и в файле с набранными формулами нажать
знак «=» (равно). В результате получим
таблицу значений функций![]() ,
,![]() и
и![]() с интервалом заданного шага. Затем для
значения
с интервалом заданного шага. Затем для
значения![]() мор.миль
определим интервал времени, в котором
находится (1852 м), и методом интерполирования
определим значение
мор.миль
определим интервал времени, в котором
находится (1852 м), и методом интерполирования
определим значение![]() .
.
Перечисленные
выше подготовительные работы по
определению времени маневров
![]() ,
,![]() и
и![]() должны быть проделаны задолго до начала
процесса расхождения. Строго говоря,
эти величины действительны для случаев,
когда груженый танкер начинает маневр
с полного маневренного хода при отсутствии
ветра и волнения моря. Если маневр
начинать с меньшей скорости, то фактически
дистанция расхождения будет несколько
больше одной мили, то же самое можно
сказать и при наличии ветра, и при
волнении. Судно в балласте имеет меньшее
значение инерционного параметра
должны быть проделаны задолго до начала
процесса расхождения. Строго говоря,
эти величины действительны для случаев,
когда груженый танкер начинает маневр
с полного маневренного хода при отсутствии
ветра и волнения моря. Если маневр
начинать с меньшей скорости, то фактически
дистанция расхождения будет несколько
больше одной мили, то же самое можно
сказать и при наличии ветра, и при
волнении. Судно в балласте имеет меньшее
значение инерционного параметра![]() и большую скорость при маневренном
полном ходе, поэтому при использовании
данных груженого судна расхождение
будет происходить на дистанции несколько
больше запланированной в 1 или 2 мили.
и большую скорость при маневренном
полном ходе, поэтому при использовании
данных груженого судна расхождение
будет происходить на дистанции несколько
больше запланированной в 1 или 2 мили.
Далее решение задачи с помощью ПЭВМ по определению безопасной дистанции между судами для начала маневра в процессе расхождения рекомендуется производить в Mathcadе, после того, как будет установлено, что пеленг на судно, идущее пересекающим курсом, заметно не меняется.
Предварительно нужно создать файл
«Безопасные дистанции для расхождения»
с указанием названия вашего судна с
занесенными формулами (8.9,8.10,8.11), а ниже
их в файле должны быть значения переменных
![]() и
функции для определения результатов
расчетаД(
и
функции для определения результатов
расчетаД(![]() ),
см. файл «Безопасные дистанции для
расхождения танкера «Кубань» водоизмещением
180000 т».
),
см. файл «Безопасные дистанции для
расхождения танкера «Кубань» водоизмещением
180000 т».
Во
время расхождения судов определим с
помощью САРПа скорость цели, например,
![]() =5м/с
и разность курсов
=5м/с
и разность курсов![]() =110.
Под каждой формулой напишем исходные
данные:
=110.
Под каждой формулой напишем исходные
данные:
![]()
![]() =5м/с,
=5м/с,![]() =110
и функция для определения результатов
расчета
=110
и функция для определения результатов
расчета
![]() (
(![]() )
=.
)
=.
После щелчка левой кнопкой мыши мгновенно получаем результат по определению величин безопасной дистанции для начала маневра, которая для уменьшения хода до малого хода равна 56 кб, при маневре пассивного торможения – 42кб, при маневре активного торможения – 40 кб.
Файл «Безопасные дистанции для расхождения танкера «Кубань» водоизмещением 180000 т».
Безопасная дистанция
![]() в кб при маневре уменьшения оборотов
двигателя с полного маневренного хода
до малого хода (подтормаживании):
в кб при маневре уменьшения оборотов
двигателя с полного маневренного хода
до малого хода (подтормаживании):