

Лекции по приводу
.pdf1
|
|
|
|
Mс |
|
|
Eп |
kя |
Iя |
M |
Mдин |
1 |
! |
|
|
|
kM |
|
|
|
|
Tяs + 1 |
|
|
Js |
|
|
|
|
|
|
|
Eя
kE
Rш
Rп
Основная литература
Ковчин С.А., Сабинин Ю.А. Теория электропривода: Учебник для вузов. — СПб.: Энергоатомиздат. Санкт-Петербургское отделение, 1994 (2000).
Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студентов ВУЗов. — М.: Изд. центр «Академия», 2006/2007.
Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода: Учебник для вузов: — М.: Энергоатомиздат., 1992.
Методические указания к практическим занятиям по дисциплине «Теория электропривода» / Сост. А.И. Косарев, Г.Г. Соколовский, В.М. Стасовский. ГЭТУ. СПб, 1997.
Дополнительная литература
Ильинский Н.Ф. Общий курс электропривода: Учебник для вузов: — М.: Издательский дом МЭИ, 2007.
Ключев В.И. Теория электропривода. Учебник для вузов. — М.: Энергоатомиздат. 1985
Водовозов В.М. Теория и системы электропривода. Изд-во СПбГЭТУ «ЛЭТИ», 2004.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. — Л.: Энергоатомиздат, 1982.
Сабинин Ю.А. Позиционные и следящие электромеханические системы: Учебное пособие для вузов.
— СПб.: Энергоатомиздат, Санкт-Петербургское отделение, 2001.
Онищенко Г.Б. Электрический привод. Учебник для вузов — М.:РАСХН. 2003.

2
Тема №1 Электропривод как система
Определение электропривода, структурная схема электропривода. Основные термины, используемые в технике электропривода.
Лекция №1
Понятие и структура электропривода.
В настоящее время действует стандарт ГОСТ Р 50369–92 «Электроприводы. Термины и определения»1. Определение. Электропривод — это электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления техноло-
гического процесса.
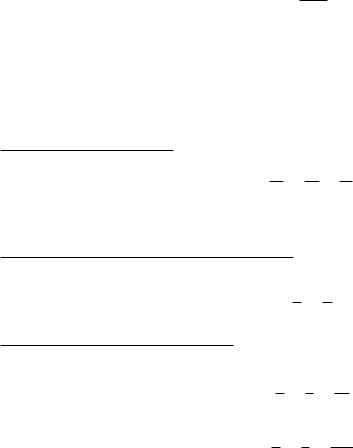
Структурная схема электропривода приведена на рис. .
|
|
|
Механическая часть |
|
|
Источник питания |
|
Возмущение |
|
|
|
|
|
|
|
|
Силовая часть |
|
|
Управление |
|
|
|
Исполн. |
ПЭ |
ЭД |
МП |
орган |
|
УУ |
|
|||
рабоч.
машины
ИУ
Система управления
Электропривод
Рис. 1. Структурная схема электропривода.
Источник энергии (ИЭ) — это как правило, промышленная сеть. В ряде случаев (на судах, самолётах), может быть автономным, т. е. аккумуляторной батареей или генератором.
Определение. Преобразователь электрической энергии (ПЭ) — это электротехническое устройство, преобразующее электрическую энергию с одними значениями параметров и/или показателей качества в электрическую энергию с другими значениями параметров и/или показателей качества.
Под параметрами энергии понимаются такие, как частота, напряжение и ток, число фаз. Например, некоторые мощные асинхронные двигатели имеют две обмотки типа «звезда», сдвинутые друг относительно друга на 30 электрических градусов, и требуют соответствующего шестифазного питания, а сеть поставляет только трёхфазное. Другой пример. Для работы двигателя постоянного тока требуется постоянное напряжение, для чего ставится преобразователь, выпрямляющий сетевое напряжение.
Основное назначение преобразователя состоит в формировании управляемого потока энергии, потребляемого рабочим процессом. Соответственно, для двигателей постоянного тока преобразователи должны обеспечивать постоянное напряжение, величина которого может регулироваться управляющим устройством, а для асинхронных двигателей преобразователи должны обеспечивать регулирование напряжения как по его величине, так и по частоте.
В прошлом в качестве преобразовательных устройств ПЭ использовались электромашинные преобразователи, потом появились ртутные на основе игнитронов. В настоящее время преимущественно используются полупроводниковые преобразователи: тиристорные управляемые выпрямители (УВ), транзисторные и тиристорные инверторы и преобразователи частоты.
Определение. Двигатель (ЭД) — это электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Двигатель используется для формирования (совместно с механической передачей) заданных форм движения рабочих органов. В некоторых режимах двигатель может выполнять и обратное преобразование.
1Данный стандарт введён в РФ впервые с 1994. До него действовал разработанный в СССР ГОСТ 16593–79 «Электроприводы. Термины и определения.» C 1994 года ГОСТ 16593–79 в РФ отменён.
3
Определение. Механическая передача (МП) — это механический преобразователь, предназначенный для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скорости их движения.
Заметим, что в тормозных режимах энергия может передаваться обратно к электродвигателю. Необходимость в механическом преобразователе рассмотрим на следующем примере [?]. Номинальная
мощность электродвигателя Pном определяется выражением
Pном = Mном!ном,
где Mном — номинальный вращающий момент на валу ротора; !ном — номинальная угловая скорость ротора.
В свою очередь
Mном = CкD2L,
где Cк — коэффициент, зависящий от конструктивных особенностей электрической машины; D — диаметр якоря; L — длина активной части якоря.
Отсюда следует, что для уменьшения габаритов двигателя (D2L) при заданной мощности необходимо увеличивать угловую скорость !ном. Обычно, для большинства применяемых в промышленности двигателей nном = 1000 . . . 6000 об/мин. В то же время для рабочих машин по технологическим условиям требуется скорость меньшая примерно в 10 . . . 100 раз. Согласование механических параметров электродвигателя (скорости и момента) с механическими параметрами рабочей машины осуществляется при помощи механической передачи (МП). При этом МП может изменять характер движения, преобразуя вращательное движение в поступательное.
Определение. Информационное устройство (ИУ) — это устройство, предназначенное для получения, преобразования, хранения, распределения и выдачи информации о переменных электропривода, технологического процесса и сопредельных систем для использования в системе управления электропривода и внешних информационных системах.
Определение. Управляющее устройство электропривода (УУ) — это устройство, предназначенное для формирования управляющих воздействий в ЭП.
При необходимости, в ЭП предусматриваются устройства сопряжения, обеспечивающие взаимодействие с сопредельными системами отдельных частей ЭП. (На рис. не показаны.)
Определение. Устройство сопряжения (электропривода) — это совокупность электрических и механических элементов, обеспечивающих взаимодействие электропривода с сопредельными системами и отдельных частей электропривода.
Определение. Система управления электропривода — это совокупность управляющих и информационных устройств и устройств сопряжения электропривода, предназначенных для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины.
Определение. Система управления электроприводом — это внешняя по отношению к ЭП система управления более высокого уровня, поставляющая информацию, необходимую для функционирования ЭП.
При рассмотрении ЭП будем выделять механическую часть ЭП, относя к ней подвижный орган электрической машины, механическую передачу и исполнительный орган (который формально не входит в состав ЭП). При этом не рассматривается то обстоятельство, что движущий момент создаётся электромагнитными процессами в двигателе. Это даёт возможность отдельно рассматривать механику электропривода.
Поскольку процессы, происходящие в исполнительном органе, который формально не входит в понятие «электропривод», оказывают на него существенное воздействие, в целом ряде случаев нельзя обходиться без учёта этих процессов.
Практически все элементы электропривода должны быть вам известны из предыдущих курсов. Основные свойства ЭП проявляются в нём как в системе, объединяющей все элементы и предназначенной для целенаправленного приведения в движение рабочих органов машины, т. е. решения задачи управления.
ГОСТ 50369–92 предусматривает деление электроприводов на несколько групп по различным признакам, некоторые из которых рассмотрены ниже.
1.По функциональному назначению приводы делятся на главные и вспомогательные. Главный привод обеспечивает движение исполнительного (рабочего) органа рабочей машины и основную операцию процесса. Вспомогательный привод обеспечивает движение вспомогательных органов машины.
2.По способу разделения энергии электроприводы делятся на а) групповой, б) индивидуальный, в) взаимосвязанный и г) многодвигательный.
Определение. Групповой электропривод — это электропривод с одним электродвигателем, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины.
Наиболее ярким примером здесь является швейная машинка, в которой перемещение иглы, ткани и шпули осуществляется от одного двигателя.
4
Определение. Индивидуальный электропривод — это электропривод, обеспечивающий движение одного исполнительного органа рабочей машины.
Всистемах индивидуального электропривода энергия разделяется в электрических цепях, что позволяет существенно упростить передаточные устройства привода и кинематику рабочей машины, что снижает металлоёмкость оборудования, повышает его надёжность при надлежащей настройке, хотя часто усложняет автоматизацию процессов управления движениями исполнительных органов.
Определение. Взаимосвязанный электропривод — это два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей и/или нагрузок, и/или положения исполнительных органов рабочих машин.
Вкачестве примера можно привести электропривод многоклетьевого проволочного стана, когда рабочие валки механически связаны между собой через прокатываемую заготовку, а задачей электропривода является поддержание заданного соотношения скоростей между валками.
Определение. Многодвигательный электропривод — это электропривод, содержащий несколько электродвигателей, механическая связь между которыми осуществляется через исполнительный орган рабочей машины.
Например, два двигателя могут работать на общий вал редуктора, с целью уменьшения суммарного момента инерции.
ГОСТ различает ЭП с разомкнутой и с замкнутой системами управления.
Определение. Электропривод с разомкнутой системой управления — это электропривод, в котором отсутствует обратная связь по регулируемой координате электропривода или по возмущению, воздействующая на управляющее устройство.
Вданном случае ЭП включает в себя преобразователь, двигатель и механическую передачу, которые составляют силовую часть привода.
Если такая связь имеется, то электропривод называется электроприводом с замкнутой системой управления.
Требования, предъявляемые к электроприводу
1.Надёжность.
2.Точность, т. е. обеспечение приводом отклонения какого-либо параметра от заданного значения не выше допустимого. Может идти речь о точности поддержания той или иной координаты, например, скорости, точности позиционирования, точности воспроизведения исполнительным органом заданной траектории и т. д.
3.Быстродействие, т. е. способность системы за минимально возможное время отработать задающие воздействие или восстановить требуемое значение координаты при действии на систему внешних возмущений.
4.Поскольку, говоря о быстродействии мы оцениваем динамические качества системы, важным является качество динамических процессов, т. е. обеспечение определённого характера их протекания.
5.Энергетическая эффективность, т. е. малые потери.
6.Совместимость с системой энергоснабжения, т. е. минимальное влияние электропривода на источник питания.
7.Ресурсоёмкость, т. е. минимальная материалоёмкость и энергоёмкость.

5
Тема №2 Механическая часть силового канала электропривода
Кинематическая и расчётная схемы механической части электропривода. Инерционные свойства элементов механической части. Характеристики сил и моментов, действующих на электропривод. Приведение моментов, сил и параметров механической части электропривода к одному валу. Одномассовая и двухмассовая механические системы. Характер движения механической системы при воздействии на неё внешних моментов.
Определение момента инерции и массы элементов кинематической схемы электропривода. Приведение инерционных масс, моментов, усилий коэффициентов жёсткости и разных форм движения к одному валу.
Прежде всего, заметим, что, занимаясь разработкой электропривода, вам придётся иметь дело с кинематическими схемами (читать или изображать их в своей документации). Элементы кинематики должны обозначаться по ГОСТ 2.770–68 «ЕСКД. Обозначения условные графические в схемах. Элементы кинематики.» А также в соответствии с ГОСТ 2.721–74 «ЕСКД. Обозначения условные графические в схемах. Обозначения общего применения.»
Итак, ЭП, как ЭМС, может быть разделён на первом этапе на механическую и электрическую части. Начиная рассмотрение с механической части, отметим, что должен знать и уметь инженер в области механики ЭП:
знать общие особенности механической части ЭМС, их элементы, связи, параметры, методы описания и анализа;
уметь на основе известной кинематики механизма, его технологических данных и сведений о технологическом процессе составить расчётные схемы;
уметь рассчитывать параметры механической части ЭП;
уметь описывать движение механической части системой дифференциальных уравнений, строить соответствующие частотные характеристики, и оценивать механические переходные процессы.
Представление о движущихся массах механической части и связях между ними даёт кинематическая схема механизма. Очевидно, что при огромном разнообразии механизмов и их механические схемы будут различны. Однако можно отметить характерные элементы, присутствующие в большинстве механизмов:
якорь (или ротор) двигателя, на который действует развиваемый двигателем момент;
ряд зубчатых передач, образующих понижающий редуктор;
соединительные муфты;
собственно, исполнительный орган.
[?] По конструкции передаточные механизмы весьма разнообразны. Далее рассмотрим некоторые их виды (рис. ).
Редукторы
Определение. Редуктор — это механизм для уменьшения частоты вращения и увеличения крутящего момента, в котором не менее двух звеньев сопряжены зубчатыми или червячными зацеплениями1.
Они бывают различных конструкций, из которых наиболее часто используются цилиндрические, конические и червячные редукторы. Конические редукторы отличаются от цилиндрических тем, что у них можно выходной вал разместить под углом ко входному.
Червячные редукторы состоят из червяка и зубчатого колеса. Они позволяют получать очень большие передаточные отношения в небольших габаритах по сравнению с цилиндрическими. Недостатком является низкий КПД и меньший, чем у зубчатых редукторов, ресурс, в связи с чем их рекомендуется применять в машинах непрерывного действия. Кроме того, они обладают свойством самоторможения, т. е. передают момент только от двигателя к исполнительному механизму, что является в ряде случаев положительным свойством.
Основными характеристиками редукторов являются максимальный крутящий момент на выходном (тихоходном) валу, максимальная частота вращения, и передаточное отношение
i = !1 ,
!2
1Данное определение дано в соответствии с ГОСТ Р 50370–92. «Редукторы и мотор-редукторы общемашиностроительного применения. Термины и определения».
Повышающий редуктор называется также ускорителем или мультипликатором [?] стр. 31.
6
ВСТАВИТЬ РИСУНОК ACAD2!
Рис. 2. Примеры передач.
где !1 — скорость на быстроходном валу редуктора; !2 — скорость на тихоходном валу редуктора. Передаточное число k-ой ступени редуктора равно
ik = z2k ,
z2k 1
где z2k и z2k 1 — число зубьев на быстроходной и тихоходной шестернях, соответственно. Общее передаточное число редуктора равно произведению передаточных чисел всех его ступеней
i = i1 i2 . . . in.
Диапазон передаточных чисел одноступенчатого редуктора составляет i = l,6 . . . 8, двухступенчатых — i = 7,1 . . . 50 (обычно i = 8 . . . 40), трёхступенчатых — i = 25 . . . 250 (обычно i = 31,5 . . . 180).
Ременные (цепные) передачи характеризуются передаточным числом
j = !1 = D2 = Z2 ,
!2 D1 Z1
где D1 и Z1 — диаметр и число зубьев входного шкива (звёздочки); D2 и Z2 — диаметр и число зубьев выходного шкива (звёздочки).
Передачи зубчатое колесо–рейка и барабан–трос преобразуют вращательное движение в поступательное и характеризуются радиусом приведения , м/рад
= v = D .
!2
Винтовая и червячно-реечная передачи преобразуют вращательное движение винта (червяка) в перемещение гайки (рейки). Радиус приведения поступательного движения к вращательному:
а) для винтовой передачи
= v = l = tш ,
!' 2
б) для червячно-реечной передачи
= v = l = tрZч ,
!' 2
где l, v — линейные перемещение и скорость; ', ! — угловые перемещение и скорость; tш, tр — шаг винта и шаг рейки; Zч — число заходов червяка.
7
|
|
|
2 |
|
|
|
|
|
|
1 |
6 |
9 |
11 |
7 |
3 |
8 |
4 |
5 |
F |
|
|||||||||
|
|
|
|
|
Mд
10 12
Рис. 3. Пример кинематической схемы.
Поворот винта на один оборот приводит к перемещению гайки на один шаг.
Для перехода от кинематической схемы к расчётной схеме обратимся к примеру электропривода механизма (рис. ).
На кинематической схеме обозначены: 1 — якорь; 2 — редуктор с зубчатыми зацеплениями 9, 10, 11, 12 ; 3 — промежуточный вал; 4 — винтовая передача; 5 — исполнительный орган; 6, 7, 8 — муфты.
Механическая часть ЭП включает в себя связанные между собой движущиеся части: якорь (ротор) ЭД, элементы кинематической связи и исполнительный орган. Отдельные элементы схемы вращаются с разными скоростями, а исполнительный орган совершает поступательное движение.
Каждый элемент схемы представляет собой инерционное звено, характеризуемое массой или моментом инерции. При нагружении отдельные элементы механизма, не обладающие абсолютной жёсткостью, деформируются.
Кинематическая схема является исходной для расчёта механики электропривода, который выполняется на основе расчётной схемы механической части.
При переходе от кинематической к расчётной схеме необходимо принимать во внимание следующие положения
Элементы механической части вращаются с различными скоростями;
Наряду с вращающимися частями могут быть элементы, совершающие поступательное движение;
Моменты и усилия могут прикладываться к различным элементам механической части;
Упругая деформация носит обычно распределённый характер;
В кинематических передачах имеют место зазоры и трение;
На отдельные элементы кинематической схемы действуют силы и моменты сопротивления.
Всвязи с этим, переход к расчётной схеме связан с введением определённых допущений и упрощений.
Ких числу могут относиться следующие:
механическая часть представляется в виде системы с сосредоточенными массами, все элементы которой делятся на элементы, в которых сосредоточены массы, и которые считаются абсолютно жёсткими, и на упругие связи между ними.
представление о том, что силы и моменты действуют только на сосредоточенные массы и не действуют на упругие связи.
в тех случаях, когда это возможно, пренебрежение зазорами в кинематических цепях.
упрощение характера сил трения, а иногда и пренебрежение трением.
В расчётной схеме все скорости, моменты инерции, массы, моменты сил, усилия и коэффициенты жёсткости приводятся к одной оси — валу двигателя. Т. е. заменяется схемой вида рис. .
J1 |
J2 |
J3 |
Рис. 4. Расчётная схема электропривода.

8
Движение каждой механической части подчиняется второму закону Ньютона. При данных значениях сил или моментов, действующих на элемент, ускорение его будет зависеть от его инерционности.
Мерой инерционности тела для поступательного движения является масса m, выраженная в кг, а для вращательного движения — момент инерции, J, в кг м2. В старых справочниках, каталогах и др. литературе вместо момента инерции использовался маховый момент GD2. Маховый момент равен учетверённому моменту инерции GD2 = 4J.
Момент инерции тела при вращении его относительно оси определяется суммой произведений масс mi малых частей тела на квадраты расстояний ri от этих частей до оси
k
X
J = miri2.
i=1
Для тел простой формы формулы расчёта моментов инерции можно найти в справочниках. Эти формулы, как правило, приводятся для вращения вокруг оси, проходящей через центр масс детали. В том случае, когда ось вращения не проходит через центр масс детали, момент инерции рассчитывается по формуле
Jд = Jд0 + mдr2,
где Jд — момент инерции детали, относительно заданной оси; Jд0 — момент инерции детали относительно оси, проходящей через центр масс и параллельной заданной оси; mд — масса детали; r — расстояние от центра масс детали до оси.
Моменты инерции шкивов тормозов, роторов двигателей часто приводятся в каталогах.
На практике часто моменты инерции сложных деталей проектировщику электропривода не задаются, и определять их приходится непосредственно по рабочим чертежам.
Для этого определяется ось вращения детали, деталь разбивается на участки, для которых момента инерции можно найти по таблицам. Затем моменты инерции вычисляются и складываются с учётом расстояний до оси вращения.
В практических расчётах вводится понятие радиуса инерции .
Определение. Радиусом инерции тела называется такое расстояние от оси до материальной точки с массой, равной массе тела, при котором она имеет такой же момент инерции относительно данной оси, как
иэто тело.
Вэтом случае
n |
|
n |
Xi |
= m 2, |
Xi |
Jт = mir2 |
m = mi. |
|
i |
|
|
=1 |
|
=1 |
Часто в таблицах приводятся не сами моменты инерции, а радиусы инерции. Если тело вращается относительно оси, не проходящей через его центр масс, то его радиус инерции определяется из соотношения
2т = 2т0 + r2,
где т — радиус инерции относительно данной оси; т0 — радиус инерции относительно оси, проходящей через центр масс тела и параллельной данной оси; r — расстояние между этими осями.
Упругие свойства элементов расчётной схемы
Теоретически все элементы механической части не обладают абсолютной жёсткостью и при нагружении деформируются. Если рассматривать эти деформации как упругие и подчиняющиеся закону Гука, который гласит, что в области упругих деформаций величина деформации прямо пропорциональна величине приложенной силы, то для оценки упругих свойств можно ввести коэффициент жёсткости c.
При линейной деформации
F = c l,
где F — сила, Н; c — коэффициент жёсткости, Н/м; l — деформация, м. Потенциальная энергия определяется выражением
Wп = c ( l)2 .
2
При скручивании
M = c' ',
где M — скручивающий момент сил, Н м; c' — коэффициент жёсткости, Н м/рад; ' — деформация, рад. Потенциальная энергия определяется выражением
Wп = c' ( ')2 . 2

9
Приведение к одной оси инерционных масс, моментов, усилий и коэффициентов жёсткости
Смысл приведения состоит в том, чтобы реальную кинематическую схему свести к схеме, в которой все элементы имеют одинаковый характер движения и двигаются с одинаковой скоростью.
При приведении необходимо обеспечить во-первых равенство кинетической и потенциальной энергии в исходной и приведённой системах, а во-вторых равенство мощности действующих сил и моментов при выполнении перемещений в исходной и приведённой системах.
Приведение момента инерции механизма к валу двигателя осуществляется исходя из равенства кинетических энергий (живых сил) в исходной и приведённой системах.
J |
|
! |
2 |
|
|
|
n |
|
J !2 |
l |
m v |
2 |
|
|
|||||||
|
д |
|
X |
|
j |
j |
X |
|
|
|
|
||||||||||
|
пр |
|
|
|
|
|
|
k k |
|
|
|||||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
|
+ |
|
|
|
|
|
, |
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
||||||
|
|
|
|
|
j=1 |
|
|
|
k=1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
откуда находим |
|
|
|
|
|
|
|
|
! |
|
|
|
|
|
|
|
! |
|
|||
Jпр |
|
|
n |
|
Jj |
!j |
2 |
l |
|
|
vk |
2 |
|||||||||
= j=1 |
!д |
+ k=1 mk |
|
!д |
, |
||||||||||||||||
или |
|
X |
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
n |
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Jj |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Xj |
|
|
|
|
X |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
|||||||
|
|
Jпр = |
|
+ mk k2, |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
=1 j |
|
k=1 |
|
|
|
|
|
|
|
|||||
где ij — передаточное число; k — радиус приведения соответствующего элемента.
Приведение сил и моментов сил осуществляется исходя из равенства мощностей в исходной и приведённой системе:
Mпр!д = M!,
откуда
! M Mпр = M !д = i .
Mпр!д = Fv,
откуда
Mпр = F v = F .
!д
Теперь приведём коэффициенты жёсткости исходя из равенства потенциальных энергий в исходной и приведённой системах.
cпр( 'д)2 |
c(' ')2 |
||||
|
|
= |
|
, |
|
2 |
2 |
||||
|
|
||||
где cпр — приведённая жёсткость; 'д — деформация, приведённая к валу двигателя, к которому приводим жёсткость; c' — реальная жёсткость; ' — реальная деформация.
c'( ')2
cпр = ( 'д)2
и, с учётом того, что 'д/i = ', окончательно
c' cпр = i2 .
Замечание на будущее: Смысл приведения всех параметров к одной оси появляется, когда пытаются сократить число масс в
упругой системе: тогда можно сравнивать жёсткости
10
Лекция №2
Временные зависимости при разгоне и торможении одномассовой механической системы.
Вдальнейшем будем рассматривать одномассовую жёсткую систему, в которой один из действующих на неё моментов является моментом двигателя, а другой является суммарным моментом сопротивления.
Впростейшем случае уравнение движения привода имеет вид
Mд Mс = Jпр"д,
где Mд — момент двигателя (электромагнитный момент двигателя); Mс — момент сопротивления, приведённый к валу двигателя (статический момент); Jпр — приведённый к валу двигателя момент инерции; "д = !˙ д = '¨ д — угловое ускорение ротора двигателя.
Из этого уравнения следует, что в установившемся (статическом) режиме алгебраическая сумма моментов должна равняться нулю, т. е. в статике все действующие на систему моменты и силы должны быть уравновешены. Если эти два момента не равны друг другу, то "д = ddt!д , 0, и в системе есть динамический режим. Разность моментов двигателя и сопротивления называется динамическим моментом
Mдин = Mд Mс.
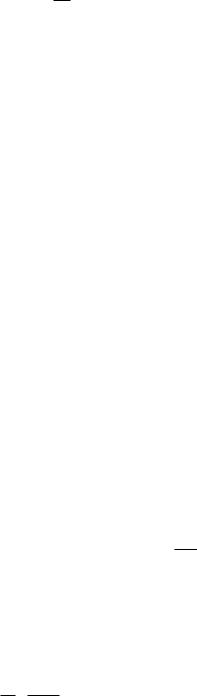
Данное уравнение справедливо в том случае, когда момент инерции постоянен. Для кривошипно-шатун- ных (рис. ), кулисных и многих других механизмов момент инерции переменный и зависит от угла поворота исполнительного механизма.
Выведем уравнение движения для случая, когда момент инерции зависит от угла поворота рычага
исполнительного механизма '. |
|
|
Шатун |
|
Кривошип |
|
Ползун |
|
Редуктор |
|
Муфта |
|
Двигатель |
Рис. 5. Кинематическая схема электропривода с кривошипно-шатунным механизмом.
Выдаваемая двигателем мощность Mд!д за вычетом потребляемой механизмом мощности Mс!д идёт на изменение кинетической энергии Eк механизма.
|
|
|
|
|
|
|
|
|
|
|
Mд!д Mс!д = |
d |
= |
|
|
d J(')!д2 |
; |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Eк |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
dt |
2 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
!д2 |
dJ(') |
|
|
|
d |
|
|
|
!д2 |
|
|
!д2 |
@J(') d' |
|
2!д |
||||||||||||||||
(Mд Mс) !д = |
|
|
|
|
|
|
|
|
+ J(') |
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
+ J(') |
|
|||||||||||
2 |
|
|
dt |
dt |
|
|
2 |
2 |
|
@' |
|
dt |
2 |
||||||||||||||||||||||||
|
d' |
1 |
|
d'д |
|
|
|
!д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
С учётом того, что |
|
= |
|
|
|
|
= |
|
|
, и d!д/dt = "д, получим |
|
|
|
|
|
|
|||||||||||||||||||||
dt |
i |
dt |
i |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
!д2 |
@J(') |
!д |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
(Mд Mс) !д = |
|
|
|
|
|
|
|
|
+ J(') |
!д"д. |
|
|||||||||||||||||||||
|
|
|
|
|
2 |
|
@' |
|
i |
|
|||||||||||||||||||||||||||
И окончательно получаем
d!д . dt
Mд Mс = J(') "д + !2д @J('), 2i @'
где Mд — момент двигателя; Mс — момент сопротивления механизма, приведённый к валу двигателя; J(')
— момент инерции механизма, приведённый к валу двигателя, и зависящий от угла поворота механизма