

17-ая моложедная школа(2014)
.pdfИНФОРМАЦИОННОЫЕ И ТОПОЛОГИЧЕСКИЕ МЕТОДЫ КОНТРОЛЯ ЭЛЕМЕНТОВ ПАМЯТИ
М.И. Ершов, К.К. Кондрашов, А.О. Гасников
Санкт-Петербургский Государственный Электротехнический Университет «ЛЭТИ» им. В. И. Ульянова (Ленина), Центр Микротехнологии и Диагностики
Внастоящее время до 90 % элементной базы используемой в электронной промышленности РФ иностранного производства. С связи с этим есть необходимость тестирования, в том числе и на информационную безопасность. Особенно данная проблема актуальна для военной и космической промышленности.
Впервую очередь данному контролю подвергаются элементы памяти, в которых могут храниться алгоритмы работы, ключевая информация и т.д. Для проведения соответствующего контроля существует ряд методов, каждый из которых обладает своими преимуществами и недостатками.
Тестирование с помощью специализированных аппаратно-программных средств (программаторы, отладчики и т.д.). Подключение происходит через стандартные аппаратно-программные средства разработки и отладки, что позволяет быстро провести анализ элементов памяти.
Топологический анализ кристаллов памяти. В рамках данного метода производится вскрытие корпуса ИС, послойное травление диэлектрических и коммутационных слоев и последующие частичное или полное восстановление принципиальной электрической схемы для ее анализа.
Подключение к шинам адреса и шинам данных массива элементов памяти. При этом появляется возможность подавать любой набор команд, а том числе и недокументированных.
Использование атомно-силовой микроскопии дает возможность побитного анализа ячеек памяти. При этом важно учитывать количество слоев металлизации в кристалле ИС и плотность упаковки ячеек памяти.
Анализ с помощью растровой электронной микроскопии. Эффект от использования РЭМ заключается в зарядке верхнего слоя диэлектрика. Под действием созданного электрического поля происходит локальное изменение состояния ячеек памяти.
Прецизионное вскрытие окон в диэлектрике с помощью ионного пучка и последующее облучение УФ излучение позволяет проводить выборочный анализ топологии массива памяти, изменяя состояние любого количества ячеек за один цикл.
70
Неразрушающий анализ кристаллов ИС с использованием “побочных” каналов. Анализ осциллограмм тока потребления и э/м поля ИС позволяет интерпретировать команды и данные для записи/считывания элементов памяти.
71
РАСЧЕТ ТЕПЛОВЫХ ПРОЦЕССОВ В ТЕРМОМЕХАНИЧЕСКИХ АКТЮАТОРАХ НА ОСНОВЕ ЭЛЕМЕНТОВ ТЕОРИИ ТЕПЛОВЫХ ЦЕПЕЙ С ГРАНИЧНЫМИ УСЛОВИЯМИ ТРЕТЬЕГО РОДА
И.А. Калашников, В.Е. Калёнов, А.П. Бройко
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Актюаторы непосредственного преобразования энергии достаточно широко применяются в микромеханических системах, к ним относят: электростатические, термомеханические, магнитостатические, пьезоэлектрические, пневматические, химические.[1] Термомеханические или тепловые преобразователи часто используются для создания микродвижетелей для микророботов, так как их изготовление не требует больших затрат с применением современных технологий, и их применение позволяет создавать устройства точного позиционирования (точность может достигать 1-5 мкм). [2]
Главной задачей работы было создание расчетной схемы на основе метода аналогии тепловых и электрических цепей для исследования тепловых процессов, протекающих в актюаторах. Цель работы – это проверка предложенной расчетной схемы. Для её достижения в ходе выполнения работы на основе граничных условий третьего рода (актюаторы закреплены в воздушном пространстве) была составлена расчетная схема, в которой вычислялись тепловые сопротивления металла, воздуха и полиимида, тепловые потоки, выделяемые при протекании тока, и температуры поверхностей металла и полиимида.
Для актюаторов с геометрическими размерами полиимидного слоя 8 мм х 2 мм и 10 мм х 2,5 мм, ширина металлической ленты на которых 0,4 мм и 0,5 мм соответственно, при сравнении рассчитанной и экспериментальной температур поверхности металла погрешность не превышает 10%. При протекании тока в 2.1 А при напряжении 186 мВ через металлическую ленту актюатора с размерами полиимида 8 мм х 2 мм рассчитанная температура поверхностного слоя металла 138 °С, а экспериментальная – 130 °С. При протекании тока в 3,2 А при напряжении 106,1 мВ через металлическую ленту актюатора с размерами полиимида 0,4 мм и 0,5 мм рассчитанная температура поверхностного слоя металла 159 °С, а экспериментальная – 150 °С.
Но для актюаторов с размерами полиимидного слоя 4 мм х 1мм и 3 мм х 0,75 мм погрешность вычислений достигает 270% и 300% соответственно. При протекании тока силой 2,46 А через металлическую часть первого актюатора расчетная и экспериментальная температуры равны 150 °С и 409 °С соответст-
72
венно, а при протекании тока силой 2 А через металлическую часть второго актюатора температуры равны 145 °С и 448 °С соответственно.
Таким образом, несмотря на то, что для двух исследуемых образцов погрешность вычисленных значений мала, в целом предложенная расчетная модель не может быть использована в конструктивных расчетах для данного типа актюаторов и требует дальнейшего исследования и доработки.
1.Каленов В.Е., Бройко А.П., и др. Микродвижители для микроробототехники //Нано- и микросистемная техника. – 2013. – №. 12. – С. 41-46.
2.Erdem E.Y. et al. Thermally actuated omnidirectional walking microrobot //Microelectromechanical Systems, Journal of. – 2010. – Т. 19. – №. 3. – С. 433-442.
73
АВТОКОЛЕБАТЕЛЬНЫЙ ГЕНЕРАТОР НА ОСНОВЕ ГИБКИХ МИКРОМЕХАНИЧЕСКИХ ЭЛЕМЕНТОВ
В.Е. Калёнов, А.В. Корляков
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Актуальность работы заключается в уменьшении энергопотребления час- тотно-резонансных датчиков при работе в динамическом режиме. Данный эффект достигается за счет использования гибких микромеханических элементов работающих в автоколебательном режиме.
В настоящее время в большинстве случаев автоколебательный режим в микромеханических датчиках создается за счет использования активных элементов: усилителей, транзисторов, диодов и т.п. Особенностью представленной работы является создание автоколебаний на основе гибких микромеханических и пассивных электрических элементов.
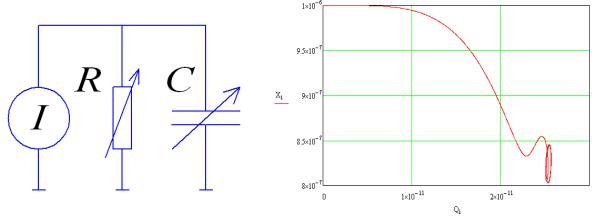
Разработанная микромеханическая автоколебательная система представляет собой параллельный RC – контур с источником тока. В качестве емкости контура используется микромеханическая плоско – параллельная структура с воздушным зазором. Одна из обкладок выполнена в виде гибкого подвижного элемента: струны, балки, мембраны или пластины. В качестве резистора используется преобразователь перемещения в сопротивление, который является в данном случае тензорезистором. Электрическая схема автоколебательной системы представлена на рисунке 1а.
а) Эквивалентная электрическая схе- б) Фазовая характеристика актоколебательма автоколебательной системы ной системы
Рисунок 1. Автоколебательный генератор на основе гибких микромеханических элементах
74
Принцип работы автоколебательного генератора основан на изменении заряда на обкладках конденсатора при перемещении его подвижной обкладки. Тензорезистор расположен в области наибольшей деформации гибкого микромеханического элемента. При подаче управляющего сигнала от источника тока на обкладках появляется нескомпенсированный заряд. Это является причиной отклонения гибкого микромеханического элемента от положения равновесия под действием электростатической силы и он начинает притягиваться к неподвижному электроду. За счет этого перемещения уменьшается сопротивление тензорезистора, что приводит к уменьшению напряжения на конденсаторе. Уменьшение напряжение в свою очередь является причиной уменьшения электростатической силы притяжения между обкладками и, следовательно, возвращению гибкого микромеханического элемента в положение равновесия. Далее цикл повторяется, т.к. в положении равновесия сопротивление тензорезистора восстанавливается и на конденсаторе появляется достаточный нескомпенсированный заряд, который создает достаточную электростатическую силу для отклонения гибкого микромеханического элемента. На рисунке 1б представлена зависимость перемещения X гибкого микромеханического элемента от накопленного на нем заряда Q.
Результатами работы является создание математической модели автоколебательного генератора на основе гибких микромеханических элементов и выявление критериев и условий получения автоколебаний в таких конструкциях.
75
НЕРАЗРУШАЮЩИЕ МЕТОДЫ ДИАГНОСТИКИ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
К.К. Кондрашов, М.И. Ершов, А.О. Гасников
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина), Центр Микротехнологии и Диагностики
Микропроцессорные системы являются неотъемлемой частью современной электроники. Область их применения необычайно широка и включает в себя практически все существующие электронные приборы любого назначения. В условиях интенсивной разработки и совершенствования продуктов электронной техники большое значение приобретает диагностика ее компонентов на предмет обеспечения информационной безопасности.
В настоящее время широко востребованы неразрушающие методы анализа микросхем. Среди них выделяется анализ по побочным каналам (side channel) – способ извлечения информации из дополнительных параметров, таких как время выполнения операций, потребляемая мощность, электромагнитное излучение, издаваемые звуки и т. п. В нашей работе диагностика проводится на основании сигнала, снимаемого с шины питания микроконтроллера или с разъема питания прибора. Амплитуды и частоты колебаний, возникающих при выполнении той или иной элементарной операции, позволяют установить ее тип (т. е. команду на языке Ассемблер) и обрабатываемые данные. В электронных устройствах чаще всего применяются схемы, не имеющие защиты от атак по побочным каналам. Уязвимость данного вида наиболее опасна для техники специального назначения и техники, обеспечивающей контроль ответственных процессов.
Подобный анализ микропроцессорных систем дает возможность получить сведения о выполняемых операциях, что, в свою очередь, открывает дорогу к восстановлению фрагментов программного кода. В зависимости от требований, предъявляемых к информационной безопасности прибора, целью исследований является как обнаружение уязвимости микроконтроллеров к атакам и выработка рекомендаций для их устранения, так и проверка исполняемого кода на наличие недокументированных функций. На сегодняшний день первоочередной задачей является разработка методов автоматизации диагностических процедур на всех этапах, что в перспективе позволит значительно снизить затраты времени на проведение анализа.
76
РАЗРАБОТКА И ИССЛЕДОВАНИЕ ТЕРМОМЕХАНИЧЕСКОГО АКТЮАТОРА
А.И. Крот, А.В. Корляков, А.П. Бройко, В.Е. Калёнов, А.В. Лагош
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Микроактюаторы применяются в качестве исполнительных механизмов. Микромеханические актюаторы обеспечивают микроперемещения и управляемую деформацию.
Наиболее часто используемым принципом преобразования запасенной или внешней индуцируемой энергии в механическое перемещение является термомеханический. Это связано, прежде всего, с относительно простой и доступной технологией изготовления таких преобразователей.
Были исследованы варианты конструкций термомеханических актюаторов, изготовленных по технологии гибких печатных плат на полимерной основе.
Были проведены моделирование и экспериментальные исследования термомеханических преобразователей и измерены их выходные параметры, такие как усилия и перемещения.
Было проведено моделирование разработанных конструкций актюаторов (8x2 мм) в программном пакете Elcut, в результате которого мы получили усилие и перемещение равное 0,86 мН и 677 мкм соответственно, при перегреве 100°С.
Для произведения экспериментальных измерений был разработан и изготовлен специальный измерительный стенд на основе магнитоэлектрического измерительного преобразователя для измерения усилий микроактюатора в диапазоне от 10-5 до 10-2 Н. Были проведены измерения развиваемой актюатором силы от его перемещения. Между перемещением и усилием была получена обратная зависимость, т.е. при увеличении перемещения актюатора уменьшается усилие. Экспериментально измеренные значения усилия и перемещения составляют – 0,83 мН и 600 мкм, соответственно, что хорошо согласуются с экспериментальными данными. Также полученные результаты говорят и о высокой степени соответствия модели, построенной в программном пакете Elcut, с реальной конструкции актюатора.
Полученные результаты позволяют провести оптимизацию параметров микроактюаторов.
77
ИСПОЛЬЗОВАНИЕ МИКРОСКОПИИ СОПРОТИВЛЕНИЯ РАСТЕКАНИЯ ДЛЯ ИССЛЕДОВАНИЯ ПОЛУПРОВОДНИКОВЫХ МАТЕРИАЛОВ
Н.А. Лашкова, Н.В. Пермяков
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
Методы сканирующей зондовой микроскопии (СЗМ) позволяют с высоким локальным разрешением получать трёхмерное изображение поверхности, визуализировать качественное распределение и получать количественные данные о её электрических, магнитных и трибологических и других характеристиках. Одним из мощных методов СЗМ является метод отображения сопротивления растекания, позволяющий выявить однородность по распределению концентрации носителей заряда, степень кристалличности нанокомпозитов, исследовать интерфейсные явления, приборные структуры, такие как HEMT-транзисторы, сенсорные слои.
Суть метода заключается в следующем: сканирование проводится проводящим зондом атомно-силового микроскопа (АСМ) в контактном режиме, при этом сила прижима зонда к поверхности (изгиб кантилевера) поддерживается постоянной. К зонду прикладывается напряжение смещения, и регистрируется результирующий ток через образец в зависимости от положения зонда одновременно с получением данных о рельефе.
В предположении постоянного контактного сопротивления зонд– поверхность при заданном смещении значение измеряемого тока пропорционально локальному сопротивлению исследуемого образца.
При измерении вольтамперных характеристик (ВАХ) зонд, задерживаясь над поверхностью, может вызывать перегрев образца и изменение сопротивления в данной точке. Чтобы поверхность образца не подвергалась такому интенсивному воздействию, можно использовать каждое сканирование в режиме сопротивления растекания как отдельную точку для построения ВАХ.
Исследования проводились в СЗМ ИНТЕГРА Терма. Использовались зондовые датчики DCP11 с алмазоподобным покрытием. Радиус закругления острия порядка 100 нм.
Исследованы полупроводниковые материалы: серия образцов, полученных химическим осаждением из газовой фазы ZnSnO3; VO2/Al на ситалле; скол
GaAs; PbS/Si, ZnO.
Также на примере тестового образца, состоящего из напылённых на ситалловую подложку металлических площадок (Au, Ag, Ni, Ti, Al), испытывалось
78
программное обеспечение, построенное в среде LabView (для получения ВАХ). Проводились измерения участка 1 мкм × 1 мкм, при подаваемом напряжении смещения от -4 В до +4 В с шагом 0,1 В.
Из программы, управляющей микроскопом, полученные данные экспортировались в формате ASCII. На первом этапе с помощью созданного программного обеспечения совмещались топографии, полученные при разных напряжениях, поскольку наличие температурного дрейфа всегда смещает область сканирования. На втором этапе пользователь выбирает точку на изображении топографии, в которой необходимо построить ВАХ. На третьем этапе из карты тока берутся значения тока в выбранной точке. Таким образом, на основании напряжений, при которых были получены группы изображений, и значений тока в выбранной точке карты тока строится ВАХ.
Результаты работы могут быть полезны в области АСМ при проверке ранее полученных результатов, при проведении исследовательских работ в области наноструктурированных полупроводниковых материалов для получения ВАХ на тех образцах, где локальное измерение ВАХ приведёт к перегреву и невоспроизводимости измерений.
1.Мошников, В.А., Спивак, Ю.М. Атомно-силовая микроскопия для нанотехнологии и диагностики: Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2009. 80 с.
2.Спивак, Ю.М. Анализ фотоприёмных монокристаллических и поликристаллических слоёв на основе халькогенидов свинца методами атомно-силовой микроскопии. // Диссертация на соискание учёной степени кандидата физикоматематических наук / СПб. 2008.
3.Диагностика материалов методами сканирующей зондовой микроскопии. Учеб. пособие. Под ред. В.А.Мошникова. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2012. 172 с.
4.В.Л. Миронов. Основы сканирующей зондовой микроскопии. Учеб. пособие. Нижний Новгород.: Институт Физики микроструктур, 2004. 110 с.
79