

Кинематика точки Способы задания движения точки
Существуют три способа задания движения точки.
Векторный способ.
Положение точки определяется радиус-вектором (рис.1.1), проведённым в данную точку из неподвижного начала отсчёта.
![]() .
.
С течением времени радиус-вектор будет
изменяться, поэтому он является некоторой
заданной векторной функцией времени
![]() .
Это уравнение называется уравнением
движения точки в векторной форме.
.
Это уравнение называется уравнением
движения точки в векторной форме.
Непрерывная кривая, с точками которой в каждый момент времени совпадает движущаяся точка, называет траекторией. По отношению к различным системам отсчёта точка будет описывать разные кривые. Следовательно, траектория относительное понятие.
Геометрическое место концов переменного вектора называется годографом. Таким образом, траектория точки есть годограф радиус-вектора этой точки.
Координатный способ.
Положение движущейся точки относительно выбранной системы отсчёта определяется её координатами в каждый момент времени (рис. 1.1):
![]()


Рис. 1. 1. Движение материальной точки
Функции
![]() должны быть однозначными, непрерывными
и, по крайней мере, дважды дифференцируемыми.
должны быть однозначными, непрерывными
и, по крайней мере, дважды дифференцируемыми.
Уравнения движения точки в координатной
форме можно рассматривать и как уравнения
траектории в параметрическом виде.
Если исключить из этих уравнений
параметр![]() ,
то получим уравнение траектории, как
пересечение двух поверхностей
,
то получим уравнение траектории, как
пересечение двух поверхностей
![]()
Естественный способ.
Если известен вид траектории, то движение
точки удобно задать естественным
способом (рис. 1.2). Для этого на
траектории назначают начало отсчёта
(точка О), направление отсчёта и записывают
зависимость дуговой координаты
![]() от времени
от времени![]()
![]() .
.
Функция
![]() по самой природе механического движения
должна быть непрерывной и однозначной.
по самой природе механического движения
должна быть непрерывной и однозначной.


Рис. 1. 2. Естественный координатный базис
С
траекторией точки можно связать
естественныйкоординатный
базис: единичные векторы касательной
— ,
главной нормали —
,
главной нормали — и бинормали к траектории
и бинормали к траектории![]() .
Здесь
.
Здесь![]() — радиус кривизны траектории.
— радиус кривизны траектории.
Эти три вектора образуют естественный
репер, вдоль них идут естественные оси.
Координатные плоскости образуют
сопровождающий трёхгранник и носят
названия: плоскость (![]() ,
,![]() )
— соприкасающаяся, плоскость (
)
— соприкасающаяся, плоскость (![]() ,
,![]() )
— нормальная, плоскость (
)
— нормальная, плоскость (![]() ,
,![]() )
— спрямляющая.
)
— спрямляющая.
Скорость точки
Рассмотрим понятие скорости точки при различных способах задания движения.
Скорость точки при векторном задании движения.
Скорость — одна из кинематических
характеристик движения точки. Это
векторная величина, отражающая быстроту
изменения положения точки в пространстве.
Пусть в момент времени
![]() точка занимала положение М и её
радиус-вектор есть
точка занимала положение М и её
радиус-вектор есть![]() .
По истечении промежутка времени
.
По истечении промежутка времени![]() точка занимает новое положение
точка занимает новое положение![]() ,
определяемое радиус вектором
,
определяемое радиус вектором![]() .
Изменение радиус-вектора за время
.
Изменение радиус-вектора за время![]() равно
равно![]() (рис. 1.3).
(рис. 1.3).
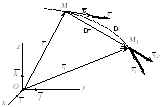
Рис. 1. 3. Скорость точки
Изменение радиуса-вектора за единицу
времени численно равно так называемой
средней скорости
![]() .
Для характеристики быстроты движения
в данный момент времени вводим понятие
мгновенной скорости как предел, к
которому стремится средняя скорость
при
.
Для характеристики быстроты движения
в данный момент времени вводим понятие
мгновенной скорости как предел, к
которому стремится средняя скорость
при![]()
 .
.
Таким образом, при векторном задании движения скорость определяется как производная от радиус вектора по времени.
Скорость точки при координатном задании движения.
Координаты точки М одновременно являются и координатами её радиус-вектора. Поэтому координатное задание движения точки эквивалентно заданию движения её векторным способом. Разложим вектор скорости точки и её радиус-вектор в направлении координатных осей:
![]() .
.
Согласно определению, данному выше, вектор скорости равен производной от радиус-вектора движущейся точки по времени
![]() .
.
Сравнивая эту формулу с предыдущими соотношениями, убеждаемся, что проекция скорости на какую-либо ось равна производной от соответствующей координаты по времени

В силу ортогональности составляющих вектора скорости, легко определить её модуль и направляющие косинусы
