

14 Общие сведения о магнитных измерениях
Магнитные измерения относятся к области измерительной техники, занимающейся измерением магнитных величин для определения характеристик магнитных полей и материалов< таких как:
- исследование свойств магнитных материалов;
- исследование элек5тромагнитных механизмов и приборов для выявления распределения магнитных потоков и МДС;
- испытания постоянных магнитов и электромагнитов;
- контроль качества магнитных материалов;
- определение физических материалов по их магнитным характеристикам (магнитная дефектоскопия);
- изучение магнитного поля земли и других планет;
- исследование слабых магнитных полей космического пространства;
- разведка полезных ископаемых;
- исследование полей биологических объектов.
Исследуются следующие магнитные величины:
В – вектор магнитной индукции, Тл
Ф – поток вектора магнитной индукции, Вб
Н – напряжение магнитного поля, А/м
Связь между вектором магнитной индукции В и напряженностью магнитного поля Н характеризуется зависимостью:
![]() ;
;
где - магнитная проницаемость вещества;
0 = 410-7 - магнитная постоянная
Магнитоэлектрический прибор состоит из двух частей – измерительного преобразователя для преобразования магнитной величины в величину иного вида и измерительного устройства. Измерительные преобразователи магнитных величин называют магнитоизмерительными и в соответствии с видом выходной величины подразделяются на три группы:
- магнитоэлектрические;
- магнитомеханические;
- магнитооптические.
Наименование магнитоизмерительного прибора определяется названием единицы физической величины, для измерения которой он предназначен, или наименованием применяемого магнитоизмерительного преобразователя.
15 Датчики Холла
Датчики Холла представляют собой полупроводник из германия, арсенид галлия и т.д. из материала вырезают пластинку которой имеют грани:
1) питания (отделяются током управления)
2) напряжения (подключаются либо в-метром либо через усилитель на в-метр.)
В зависимости от тока управления различают микромощные и простые (ток управления десятки амперов)
16 Преобразователи Гаусса
Магниторезистивные преобразователи менее распространены, чем преобразователи Холла. Для их изготовления применяются висмут, сурьмянистый индий, сурьмянистый никель и др.
Относительное изменение сопротивление металла или полупроводникового материала при воздействии магнитного поля с индукцией В описывается формулой:
![]()
где А – коэффициент пропорциональности, зависящий от формы и размеров преобразования и свойств материала.
Uнз – подвижность носителя заряда
Наибольшее относительное изменение сопротивления дает магниторезистивный преобразователь, имеющий форму диска с электродом в центре и электродом по окружности. В этом случае погрешность, связанная с эффектом Холла, практически отсутствует.
Недостаток магниторезистивных преобразователей – это зависимость от температуры. В качестве измерительной цепи обычно используют четырехплечные мосты или компенсаторы
17 Реостатные преобразователи
Реостатный преобразователь – прецизионный реостат, движок которого перемещается под действием измерительной величины. Входной величиной преобразователя является линейное или угловое перемещение движка; выходной – изменение его сопротивления.
Устройство преобразования показано на рис.1
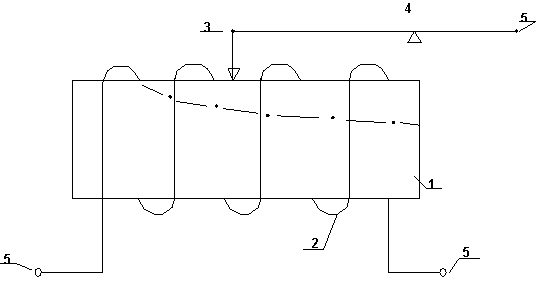
рис.1
Он состоит из каркаса 1, на котором намотан провод 2, изготовленный из материала с высоким удельным сопротивлением, и тока съемного двиэка 3, укрепленного на оси 4. 5 – выводы. Каркас с намоткой может иметь и переменное сечение (штриховая линия), тогда функция преобразования R=f(x) (х - перемещение) является нелинейной, или каркас может быть кольцевой, тогда R=f(α) (α– угловое перемещение).
При перемещении движка вдоль каркаса на величину шага обмотки ∆x=λ сопротивление изменяется на ∆R=(dR/dx)λ, где dR/dx – производная требуемой функции преобразования R=f(x) по перемещению движка. При перемещении движка с одного витка на другой сопротивление изменяется на величину, равную сопротивлению одного витка.
Потенциометрическая схема включения преобразователя показана на рис.2
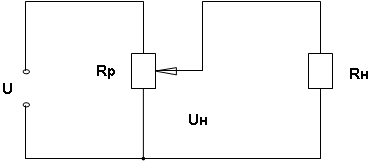
рис.2
Если сопротивление нагрузки RH велико (RH>>RP), что током в нем можно пренебречь по сравнению с током в RP, то рассмотренный преобразователь работает в режиме холостого хода и напряжение на нагрузке
UH=UR/RP
пропорционально сопротивлению R.
Если преобразователь имеет пропорциональную функцию преобразования R=(RP/ℓ)x, то напряжение UH пропорционально перемещению движка
UH=(U/ℓ)x, (ℓ - перемещение)