

7535
.pdf30
Если при этом все силы системы лежат в одной плоскости, то равновесие
n
системы описывается одним уравнением: ∑mi = 0.
i=1
1.7.3 Система параллельных сил
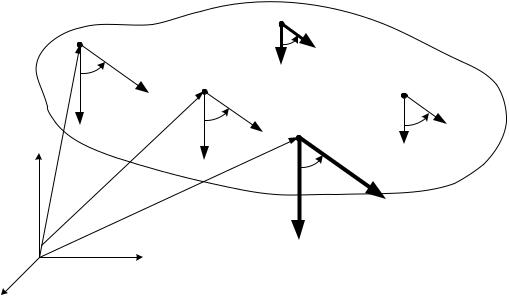
Если линии действия всех сил параллельны друг другу (рис. 1.27). Направим ось z параллельно этим силам. В этом случае являются тождествами уравнения проекций сил на оси х и у, а также уравнения моментов сил относительно оси z.
z
|
|
R |
|
R |
Fn |
O |
F2 |
|
R |
|
|
|
F1 |
|
|
y |
|
x
Рис. 1.27
Остаются три уравнения пространственной системы параллельных сил:
∑n Fiz = 0,i=1
|
n |
R |
|
|
|
∑M x (Fi ) |
||
i=1 |
|
|
n |
R |
|
∑M y (Fi )i=1
=0,
=0,
1.7.4 Сходящаяся система сил
Если линии действия всех сил системы проходят через одну точку, то моменты сил относительно этой точки (или любой проходящей через нее оси) будут равны нулю. В этом случае для системы сходящихся сил остаются только уравнения проекций сил:
|
n |
∑Fix = 0 |
|
i=1 |
|
|
n |
|
∑Fiy = 0 |
i=1 |
|
n |
|
∑Fiz = 0.i=1

31
1.8 Приведение систем сил к простейшему виду
Согласно основной теореме статики, любая система сил заменяется одной силой (равной главному вектору системы сил R и приложенной в центре приведения О) и/или одной парой (с моментом, равным главному моменту системы сил относительно центра приведения M O ).
Однако в ряде случаев и эту систему сил можно упростить. Рассмотрим эти случаи.
1) Если R = 0 и M O = 0 , то система сил уравновешена (эквивалентна нулю). 2) Если R = 0 и M O ¹ 0 , то система сил эквивалентна одной паре сил.
3) Если R ¹ 0 и M O = 0 , то система сил эквивалентна одной силе, т. е. име-
ет равнодействующую, которая проходит через центр приведения О.
4) Если R ¹ 0 и M O ¹ 0 (имеются и сила и пара), то дальнейшее упрощение системы зависит от взаимного расположения векторов R ¹ 0 и M O ¹ 0 .
В случае, если пара сил действует в плоскости, перпендикулярной силе R , система сил не может быть более упрощена. Такая система сил называется динамическим винтом, силовым винтом или динамой.
|
|
|
R |
|
|
|
|
|
|
|
R |
|
|
|
|
F |
|
R R |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
m |
(P, P′) |
|
|
|
|
|
|
|
|
R |
|
|
|
R |
|
R |
|
|
|
|
R |
|
P |
|
|
|
|
P′ |
|
P |
|
|
|
|
P′ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
R |
R R |
|
|
|
|
|
|
|
|
|
|
|
||
cosα = +1 |
|
|
cosα = −1 |
|
|
m(P, P′) |
||||||
|
|
|
|
|
|
|
||||||
(проекция положительна) |
(проекция отрицательна) |
|||||||||||
|
|
|
|
|
|
Рис. 1.28 |
|
|
|
|
|
|
1.9Центр тяжести
1.9.1Центр параллельных сил
|
Рассмотрим систему параллельных и одинаково направленных сил |
R R |
R |
F1, F2 ,..., Fn , приложенных к твердому телу в точках O1 , O2 ,..., On . (рис. 1.29) Эта си-
стема сил имеет равнодействующую которая имеет то же направление, что и
R n |
R |
n |
силы системы: R = ∑Fi |
. По модулю она равна R = ∑Fi . |
|
i=1 |
|
i=1 |
32
Имеется такая точка C , через которую линия действия равнодействующей пройдет при любом направлении сил системы.
Согласно теореме Вариньона, момент равнодействующей системы сил относительно любой точки равен сумме моментов всех сил системы относительно этой точки.
В рассматриваемом случае, например,
R |
R |
n |
R |
R |
|
R |
R |
n |
R |
R |
|
MO |
(R)= ∑MO (Fi ) |
или |
rC |
×R |
= ∑(ri |
×Fi ) |
|||||
|
|
|
i=1 |
|
|
|
|
|
i=1 |
|
|
|
R |
R |
R |
— |
радиус-векторы точек O1 , O2 ,..., On , проведенные из начала |
||||||
где |
r1 |
, r2 |
,..., rn |
||||||||
R
координат (точки O ), rC — радиус-вектор точки С.
|
|
|
e′ |
|
|
|
R |
|
|
R |
|
|
R |
e |
|
|
F1′ |
|
|
|
|
F′ |
R |
|
|
Fn′ |
|
|
R |
R |
|
|
F |
2 |
|
|
1 |
C |
|
|
|
R |
|
|
|
R |
Fn |
|
R |
F2 |
|
z |
r1 |
|
|
|
R |
|
|
|
r2 |
|
|
R |
|
|
rC |
R |
R |
|
R |
R′ |
O
y
x
Рис.1.29
Выразим в последнем равенстве все векторы сил через единичный вектор, тогда оно примет вид:
R |
R |
n |
R |
× Fi |
R |
R R |
|
n |
R |
|
R |
|
|
rC × R e = |
∑(ri |
e ) |
или (RrC )×e |
= |
∑Fi ri |
×e |
|
|
|||||
|
|
i=1 |
|
|
|
|
i=1 |
|
|
|
|
|
|
Чтобы это равенство выполнялось при любом по направлению единичном |
|||||||||||||
векторе |
e должны быть равны сомножители этого вектора в левой и правой ча- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
n |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
R |
|
n |
R |
|
|
|
|
R |
|
∑Fi ri |
||
|
|
|
|
|
|
|
|
i =1 |
|
||||
стях, т. е. RrC |
= ∑Fi ri |
|
откуда получаем: |
|
rC = |
. |
|||||||
|
|
|
|||||||||||
|
|
|
i=1 |
|
|
|
|
|
|
|
|
R |
|
Точка С, через которую линия действия равнодействующей пройдет при любом повороте системы параллельных сил, называется центром параллельных сил. Формула определяет положение центра параллельных сил через его ради- ус-вектор.
33
Координаты центра параллельных сил можно получить, если спроектировать равенство на координатные оси:
|
|
|
n |
|
|
|
|
= |
∑xi Fi |
||||
x |
i=1 |
|
, |
|||
|
|
|||||
|
C |
|
R |
|
|
|
|
|
|
n |
|
|
|
|
|
|
y F |
|||
|
|
= |
∑ i |
i |
||
yC |
i=1 |
|
, |
|||
|
|
|||||
R
∑n z F
i i
z = |
i=1 |
|
. |
|
|
||
C |
R |
||
Формулы справедливы и для случая параллельных сил, направленных в разные стороны, если в них полагать величины Fi для сил одно го направления со знаком «плюс», а для сил другого направления со знаком «минус». При этом, конечно, сумма сил не должна быть равна нулю.
1.9.2 Центр тяжести
Силы притяжения отдельных частиц тела к Земле направлены к центру Земли. Поскольку размеры рассматриваемых тел малы по сравнению с радиусом Земли, эти силы можно считать параллельными. Равнодействующая этих параллельных сил – это сила тяжести (ее модуль – это вес тела), а центр этой системы параллельных сил (в котором всегда приложена сила тяжести) называется центром тяжести тела.
Если обозначить модули сил тяжести отдельных частей тела и
n |
|
|
|
|
|
|
|
|
|
|
|
|
вес тела G = ∑Gi , то радиус-вектор и координаты центра тяжести могут быть |
||||||||||||
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
R |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
R |
|
∑Gi ri |
|
|
|
|
|||||
|
= |
i=1 |
|
|
|
, |
из которой следует, что |
|||||
вычислены по общей формуле |
r |
|
|
|
||||||||
|
|
|
|
|||||||||
|
C |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑xiGi |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
x |
= |
|
i=1 |
|
, |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
C |
|
|
|
|
G |
|||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
∑yiGi |
|||||
|
|
|
y |
= |
|
i=1 |
|
|
, |
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
C |
|
|
|
|
G |
|||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
= |
∑ziGi |
||||||
|
|
|
z |
i=1 |
. |
|||||||
|
|
|
|
|||||||||
|
|
|
|
C |
|
|
|
|
G |
|||
34
Если тело однородное, т. е. все его части имеют один и тот же удельный
вес γ = gρ , где g − |
ускорение свободного падения, а ρ |
− |
удельная плотность, |
|
n |
|
|
то G = γV и Gi = γVi , |
где V = ∑Vi − объем всего тела, а Vi |
− |
объем i- й его части. |
|
i=1 |
|
|
Тогда уравнения преобразуются в уравнения для координат центра тяжести объема:
|
|
|
n |
|
|
|
|
= |
∑xiVi |
|
|
x |
i=1 |
, |
|||
|
|||||
|
C |
|
V |
|
|
|
|
|
n |
|
|
|
|
|
∑ yiVi |
|
|
|
|
= |
i=1 |
|
, |
yC |
|
||||
|
|
||||
V
∑n z V
i i
zC |
= |
i=1 |
. |
|
V |
||||
|
|
|
||
|
|
|
|
|
|
|
|
|
Центр тяжести однородной тонкой пластины постоянной толщины (оболочки) — может быть вычислен аналогично через площади отдельных ее ча-
n
стей Ai и общую площадь A = ∑ Ai :
i =1
|
|
|
∑xi Ai |
|||
|
|
|
n |
|
|
|
x |
= |
i=1 |
|
, |
||
|
|
|||||
|
C |
|
A |
|
|
|
|
|
|
n |
|
|
|
|
|
|
y A |
|||
|
|
= |
∑ i |
i |
||
yC |
i=1 |
|
, |
|||
|
|
|||||
A
∑n z A
i i
z = |
i=1 |
|
. |
|
|
||
C |
A |
||
Центр тяжести однородного пространственного ломаного стержня, состоящего из ряда прямолинейных участков, определяется через длины его участ-
n
ков Li и общую длину L = ∑Li :
i=1
35
|
|
|
n |
|
|
|
|
= |
∑ xi Li |
|
|
x |
i=1 |
, |
|||
|
|||||
|
C |
|
L |
|
|
|
|
|
n |
|
|
|
|
|
∑ yi Li |
|
|
|
|
= |
i=1 |
|
, |
yC |
|
||||
|
|
||||
L
∑n z L
i i
z = |
i=1 |
|
. |
|
|
||
C |
L |
||
36
ГЛАВА 2. КИНЕМАТИКА
2.1 Движение. Кинематические характеристики
Кинематикой называется раздел механики, в котором изучаются движения материальных тел без учета их масс и действующих на них сил, то есть с чисто геометрической точки зрения.
Движение рассматривается по отношению к некоторой координатной системе, которую называют системой отсчета.
Время в классической механике считается абсолютным, то есть протекающим одинаково во всех системах отсчета. Все другие переменные величины рассматривают как функции времени. Отсчет времени ведут от некоторого начального момента .
Основной задачей механики является изучение способов задания движения тел. Движение тела считается заданным, если для любого момента времени можно математически указать положение любой точки тела по отношению к данной системе отсчета.
Кинематика рассматривает кинематические характеристики, такие как скорости или ускорения, и устанавливает связи между ними.
Основными разделами кинематики являются: ∙кинематика точки, ∙кинематика твердого тела.
2.2Кинематика точки
2.2.1Способы задания движения точки
Вкинематике используют три способа задания движения точки: векторный, координатный и естественный.
Векторный способ задания движения точки
Положение движущейся точки М по отношению к системе отсчета Оxyz можно задать радиус-вектором этой точки , который считается векторной функцией времени:
Это уравнение является уравнением движения точки в векторной форме.

37
y |
|
|
|
Линия, которую описывает точ- |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ка в своем движении, называет- |
y |
|
|
M |
ся ее траекторией. Траектории |
|
|
|
бывают прямолинейные и кри- |
|||
|
|
|
|
|
|
j |
|
R |
|
волинейные. |
|
|
r |
|
|
||
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
x |
|
|
|
|
|
|
||
Рис. 2.1
Координатный способ задания движения точки
Положение точки можно определить, если задать ее координаты в виде
функций времени. В декартовых, координатах это будут функции:
,.
Чтобы получить уравнение траектории в явной форме надо из этих уравнений исключить время. y=f(x)
Естественный способ задания движения точки
Этот способ применяется тогда, когда заранее известна траектория точки.
A |
− |
O + |
M |
|
|
|
|
траектория |
|
|
|
|
|
|
s
B
Рис. 2.2
Чтобы задать движение некоторой точки М естественным способом, следует указать:
1)траекторию точки (кривая АВ);
2)начальную точку на ней (точка О);
3)положительное и отрицательное направление отсчета,по траектории;
4)уравнение движения точки по траектории: в котором s есть
дуговая координата, то есть длина дуги по траектории между точками О и М, взятая со знаком «плюс» или «минус» в зависимости от того в какой части траектории находится точка. Дуговая координата определяет положение точки, а не пройденный ею путь.

38
2.2.2 Скорость точки
Определение скорости при векторном способе задания движения Скоростью точки называется кинематическая характеристика движения,
равная производной по времени от радиус-вектора этой точки:
Скорость точки – величина векторная, ее направление показывает куда в
данный момент движется тело, а ее модуль – быстроту изменения положения |
|||||||
точки. Размерность модуля скорости: |
! м⁄с. |
|
|
||||
Определение скорости при координатном способе задания движения |
|||||||
%, &– |
проекции вектора скорости на координатные оси, они равны произ- |
||||||
|
|
|
|
|
|
& |
|
водным по времени от соответствующих координат: % |
|
||||||
Обычным образом находятся модуль вектора скорости: ' % ( & |
|||||||
и его направляющие косинусы: |
)*% |
+, , %⁄. |
|
||||
|
|
|
|
*& |
+, , &⁄ |
|
|
Определение скорости при естественном способе задания движения |
|||||||
Вектор |
|
есть |
единичный вектор, |
|
|
V |
|
|
- |
|
|
|
"− " |
|
τV = dr ds |
направленный по касательной к траектории |
|
|
|||||
в положительную сторону дуговой коорди- |
O |
s |
M |
||||
наты. Обозначим его |
и будем называть |
||||||
единичным вектором |
касательной. |
|
|
|
||
. |
|
R |
||||
|
Тогда вектор скорости можно предста- |
R |
r |
|||
цию |
|
|
||||
|
|
|
j |
|
|
|
вить как |
, |
|
|
|
||
|
|
/ |
|
O |
|
i |
|
где /. представляет собой проек- |
|
|
R |
||
|
вектора скорости на касательную, ко- |
|
|
|
||
|
|
|
|
|||
торую |
также называют алгебраическим |
|
|
|
||
значением скорости. |
|
|
|
Рис. 2.3 |
||
Подведем итог:
1) Скорость всегда направлена по касательной к траектории в сторону
движения; |
| /| | |; |
2) Скорость по модулю равна |

39
3) Знак проекции / показывает направление скорости: при |
/ |
ско- |
||
рость |
направлена в |
положительном направлении дуговой координаты, а |
при |
|
|
|
1 0 |
|
|
/ 3 0 − в отрицательном направлении. |
|
|
||
2.2.3 Ускорение точки
Определение ускорения при векторном способе задания движения точки
Ускорением точки называется кинематическая характеристика движения,
равная производной по времени от вектора скорости точки: |
||||
4 |
6 |
|
|
4 7 |
5 |
6 |
или |
|
|
Ускорение характеризует изменение вектора скорости. |
||||
Размерность модуля ускорения |
4! |
м⁄с . |
||
Определение4ускорения7при координатном способе задания движения
% %
4& & 7
то есть проекции вектора ускорения на координатные оси равны вторым производным по времени от соответствующих координат, или первым производным по времени от соответствующих проекций вектора скорости.
Обычным образом находятся модуль вектора ускорения:
4 '4% ( 4&
и его направляющие8 +,косинусы4 , :4 ⁄4 )8&% +, 4 , 4%&⁄4.
2.2.4 Геометрия траекторий
Радиус кривизны
Рассмотрим произвольную кривую. Пусть материальная точка М перемещается по ней и ее дуговая координата при этом меняется. Построим в точке.М единичный вектор касательной
траектория
ρ
M
τR
Рис. 2.4
Из геометрии кривых известно, что через точку кривой М можно провести окружность, которая будет наилучшим образом совпадать с данной кривой в