

7535
.pdf20
|
|
|
|
|
|
l2 |
||
а) |
|
|
б) |
|
|
|||
|
|
|
l |
|
|
l1 |
||
|
|
|
|
|
|
|
||
|
l |
|
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
A |
C |
B |
B |
A |
C |
|
l1 |
l |
|
||
|
|
|
2 |
|
|
|
|
|
|
R |
R |
|
|
|
|
R |
|
|
R |
|
F2 |
||
|
F1 |
|
|
F1 |
|
|
|
R |
|
|
|
|
|
R |
|
|
|
|
|
|
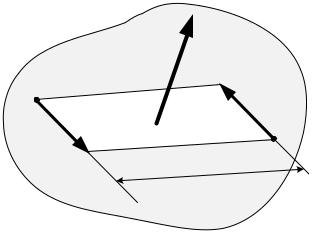
Рис. 1.20 |
|
|
2) |
силы направлены в противоположных направлениях и не равны по |
||||
модулю (рис. 1.20 б). Для определенности пусть F1 > F2 .
В обоих случаях величину реакции и положение линии ее действия можно найти с помощью следующей теоремы:
Равнодействующая двух параллельных сил равна их главному вектору. Линия ее действия расположена в плоскости сил, и проходит параллельно линиям действия сил на расстояниях от них, которые обратно пропорциональны
модулям сил. |
|
То есть: |
R = F1 + F2 , |
В первом случае модуль равнодействующей равен R = F1 + F2 , а во втором случае R = F1 − F2 , причем равнодействующая направлена в сторону большей си-
лы. Линия действия равнодействующей проходит через точку С, которая в первом случае расположена в пределах отрезка АВ, а во втором случае, − за его пределами со стороны большей силы.
Отрезки, определяющие положение точки С, в обоих случаях определяют-
ся с помощью пропорций: |
l1 |
= |
l2 |
= |
l |
, |
|
||
F2 |
F1 |
R |
|
||||||
|
|
|
|
|
|
|
|||
где |
l1, l2 − |
расстояния от линии действия равнодействующей R |
до линий |
||||||
действия |
сил |
F1 и F2 соответственно, |
а |
l − расстояние между |
линиями |
||||
действтя сил F1 |
и F2 . |
|
|
|
|
|
|
|
|
Следствие из теоремы:
1)Любую силу можно разложить на две параллельные силы, направленные
водну или в разные стороны. Это можно сделать бесконечным количеством
способов.
R R
2) Легко заметить, что модули моментов сил F1 и F2 относительно точки С
21
|
R |
R |
одинаковы, а сумма моментов будет равна нулю: |
MC (F1 )+ MC (F2 )= 0 |
|
3) Если система параллельных сил состоит более чем из двух сил, то, последовательно попарно суммируя эти силы, можно найти ее равнодействующую (при условии, что она существует).
1.5.2 Пара сил, момент пары
Парой сил (или просто парой) называется система из двух равных по модулю, противоположно направленных параллельных сил.
Система сил, образующих пару, не является уравновешенной. Пара сил не имеет равнодействующей, и по этой причине ее нельзя уравновесить одной силой.
Пара есть особая мера механического взаимодействия.
Сила и пара сил представляют собой два базовых неупрощаемых элемента статики.
R ( R R ′)
m F , F
R
F ′
A
B
R
F
h
Рис. 1.21
|
|
|
R |
R |
Для пары сил (рис. 1.21) выполняется условие F |
′ = −F и, следовательно, |
|||
главный вектор этих сил равен нулю: |
R |
R |
|
|
F¢ |
+ F = 0 . |
|||
Плоскость, проходящая через линии действия сил пары, называется плос- |
||||
костью действия пары. |
Кратчайшее расстояние между линиями действия сил |
|||
пары h называется плечом пары. |
|
|
|
|
|
R R |
|
R R |
R |
Моментом пары |
(F, F¢) называется вектор |
m(F, F¢), направленный пер- |
||
пендикулярно плоскости действия пары в соответствии с правилом «правого
винта» (рис. 6.3), и равный по модулю произведению модуля силы на плечо
пары: ( R R¢)= × = ¢× . m F, F F h F h
Размерность модуля момента пары [m] = Нм.
22
Теорема:
Сумма моментов сил, составляющих пару, одинакова относительно любой точки пространства и всегда равна моменту пары.
Следствие:
Момент пары сил равен моменту одной из сил пары относительно точки приложения другой силы пары.
1.5.3 Теорема об условиях эквивалентности пар
Теорема:
Две пары, имеющие векторно-равные моменты, эквивалентны друг другу. Согласно этой теореме можно сделать любыми величины модулей сил и плеча пары, сохраняя их произведение, т. е. модуль момента пары; пару можно переносить в любое другое положение в плоскости ее действия и поворачивать ее на произвольный угол; пару можно переносить на параллельную плоскость
действия.
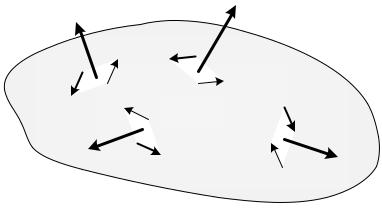
1.5.4 Главный вектор и главный момент системы пар
Рассмотри систему |
n |
пар (F, F′), где i =1,2,...n, , произвольно расположен- |
|||||
ных в пространстве (рис. 1.23). |
|
||||||
|
|
|
|
R |
(Fi , Fi′) |
R |
|
Момент i-й пары m |
для краткости будем обозначать mi . |
||||||
|
R |
R |
|
(Fi , Fi′). |
|
|
|
То есть |
mi |
= m |
|
|
|||
Главный вектор системы пар определяется через сумму всех сил, входя- |
|||||||
|
|
|
∑( |
i |
i ) |
|
|
щих в систему: |
|
R |
|
n |
R |
R |
|
R = |
|
|
F + F ′ . |
|
|||
i=1
Поскольку силы пары равны и противоположно направлены, то векторная сумма сил пары будет равна нулю, поскольку Fi = −Fi′. По этой причине резуль-
татом суммирования сил всех пар будет ноль: |
R = 0. |
|
|||
|
Главный момент системы пар относительно некоторого центра О опреде- |
||||
ляется |
суммированием моментов |
всех |
сил, |
входящих в систему: |
|
R |
n |
R R R R |
|
|
|
MO |
= ∑(MO (Fi )+ MO (Fi )). |
|
|
|
|
|
i=1 |
|
|
|
|
|
Сумма моментов сил пары относительно любой точки пространства равна |
||||
|
|
R |
n R |
R R |
n R |
моменту пары. Отсюда следует, что MO |
= ∑m (Fi , Fi′)= ∑mi . |
||||
|
|
|
i=1 |
|
i=1 |
23
R |
R |
R |
R R |
′) |
m1 |
mi |
= m (Fi , Fi |
||
R |
|
|
|
|
Fi |
i − я пара |
|
|
|
|
|
|
||
R |
′ |
|
|
|
F |
|
|
|
|
|
i |
|
|
|
R mn
Рис. 1.22
Таким образом, мы убедились, что справедлива
Теорема о сложении пар:
Система пар сил эквивалентна одной результирующей паре, момент которой равен векторной сумме моментов этих пар.
Следствие:
∙Моменты двух пар складываются аналогично тому, как складываются силы: по правилу параллелограмма или с помощью треугольника моментов.
∙Для нескольких пар сложение выполняется по правилу многоугольника моментов, которое аналогично правилу силового многоугольника. Результирующая пара будет замыкающей стороной многоугольника моментов.
∙Поскольку моменты пар не зависят от выбора точки приведения, то и главный момент, как их сумма, в данном случае от выбора центра не зависит.
1.5.5 Условие уравновешенности системы пар
Пара сил не является уравновешенной системой сил. Поэтому для уравновешенности системы пар требуется, чтобы момент результирующей пары был равен нулю. То есть, для того чтобы система пар была уравновешенной, необходимо и достаточно, чтобы выполнялись следующие условия:
1) В векторной форме векторная сумма моментов всех пар должна быть
n
равна нулю: ∑ R = mi 0
i=1
2)В геометрической форме многоугольник моментов пар должен быть за-
мкнут.
3)В аналитической форме сумма проекций моментов пар на каждую из координатных осей должна быть равна нулю:
24
∑ mix |
= 0, |
|
= 0, |
∑ miy |
|
∑ miz |
= 0. |
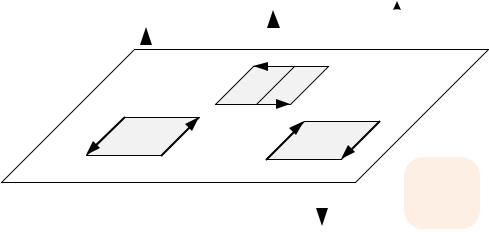
1.5.6 Моменты пар, расположенных в одной плоскости
Если пары расположены в одной плоскости (рис. 1.23), то их вектормоменты направлены перпендикулярно к этой плоскости. В этом случае моменты пар отличаются только модулем и знаком проекции на ось z, перпендикулярную к плоскости действия пар, и могут рассматриваться как скалярные величины.
Проекции эти положительны, если при взгляде на плоскость со стороны положительного направления оси, мы видим пары действующими против часовой стрелки (рис. 1.24).
Для плоской системы сил введем понятие алгебраического момента пары: алгебраическим моментом пары называется взятое со знаком «плюс» или «минус» произведение одной из сил пары на плечо пары:
mi = m (Fi , Fi′) = ±Fd .
|
|
|
|
|
|
|
|
|
|
R |
|
|
ось z |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
R |
|
|
|
|
|
|
m2 |
|
|
|
|||
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
h2 F ′ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
R |
|
h1 R |
|
|
|
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
R |
|
h3 |
|
|
|
|||||||
F |
|
|
|
|
|
|
|
||||||||
|
′ |
F3 |
|
R |
′ |
||||||||||
1 |
|
|
F |
|
|
|
|
F |
|||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
m1 = +F1h1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 = +F2h2 |
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
m3 = −F3h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
m3 |
|
|
|
|
|
|
|
|
|
Рис. 1.23 |
|
|
|
||||||
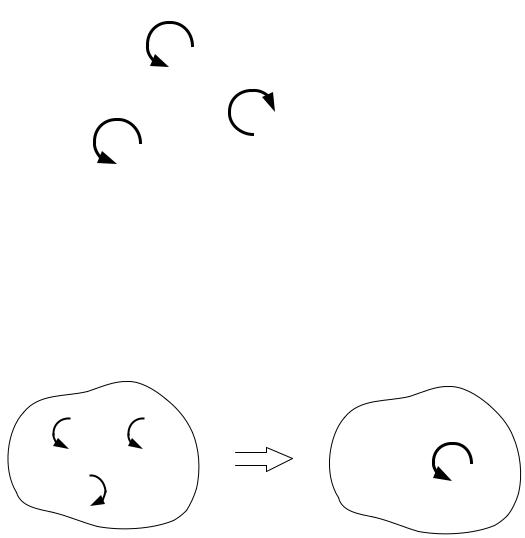
При решении плоских задач пара изображается скобкой, стрелка которой указывает направление вращения пары, поскольку направление сил пары, ее плечо и место расположения не существенны, − они могут меняться произвольно, если при этом не меняется момент пары.
25
|
m2 |
m1 = +F1h1 |
|
|
|
|
|
m2 = +F2 h2 |
|
m3 |
|
m1 |
|
m3 = −F3h3 |
|
|
|
Рис. 1.24
Сложение пар сил, лежащих в одной плоскости или в параллельных плоскостях, является частным случаем сложения пар: в этом случае векторное сложение можно заменить алгебраическим сложением:
M = m1 + m2 + m3 = F1h1 + F2h2 − F3h3
m1 m3
M
m2
Рис.1.25
Если пары лежат в одной плоскости, то путем суммирования их можно заменить одной эквивалентной парой, момент которой назовем результирующим алгебраическим моментом системы пар. Результирующий алгебраический момент системы пар, расположенных в одной плоскости, равен сумме алгебраи-
n
ческих моментов составляющих пар: MO = ∑mi .
i=1
Система пар находится в равновесии только в том случае, когда результирующий момент равен нулю. Таким образом, для равновесия пар сил, действующих на твердое тело в одной плоскости, необходимо и достаточно, чтобы
n
сумма алгебраических моментов этих пар была равна нулю, то есть ∑mi = 0.
i=1

26
1.6 Произвольная пространственная система сил
Самый общий случай представляет собой система, состоящую из любого количества сил, как угодно расположенных в пространстве – произвольная пространственная система сил.
1.6.1 Лемма Пуансо о параллельном переносе силы
Силу F можно переносить на параллельную линию действия, добавляя при этом присоединенную пару, момент которой равен моменту силы относительно новой точки приложения силы.
Пусть дана сила F , приложенная в точке A (рис. 1.26 а).
Приложим к точке B две силы: F ′ и F ′′ , равные по величине и противо-
положно направленные ( F ′′ = − F ′ ), что допускается в соответствии с аксиомой
R′ R′′ |
) ≡ 0 |
. Пусть по модулю они будут равны силе |
F и парал- |
2, поскольку (F , F |
лельны ей.
R ( R ) Π
MO F
R
F′′
R |
|
R |
|
′ |
F′ |
||
F |
|||
r |
|
|
|
R |
|
|
|
F |
|
|
Рис. 1.26
Полученная система сил |
|
|
|
|
|
R |
|
|
|
|
||||
представляет собой силу F ′ , геометрически рав- |
||||||||||||||
R |
|
|
|
|
|
|
|
|
|
R |
′′ |
R |
||
ную силе F , приложенную в центре приведения B и пару сил F |
и F , момент |
|||||||||||||
|
R |
R R |
R |
R |
|
|
|
|
|
|
|
|
|
|
|
|
× F . |
|
|
|
|
|
|
|
|
|
|
||
которой равен m(F, F |
′′) = r |
|
|
|
|
|
|
|
|
|
|
|||
Поскольку выполненные преобразования эквивалентны, то |
|
|
|
|
||||||||||
|
|
|
R |
R |
R |
R |
|
|
R |
R R R |
|
|
|
|
|
|
|
(F ) ≡ (F, (F |
′, F ′′)) ≡ (F |
′, m (F, F ′′)) . |
|
|
|
|
|||||
Добавляемая пара сил называется присоединенной парой. |
|
|
|
|
||||||||||
|
присоединенной пары, |
|
|
|
|
|
||||||||
Момент |
добавляемой при приведении силы F |
к |
||||||||||||
|
|
относительно выбранного центра B : |
||||||||||||
центру B , равен моменту данной силы F |
||||||||||||||
R R R |
R R |
|
|
|
|
|
|
|
|
|
|
|
|
|
m(F, F′′) |
= MB (F ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
27
Операция переноса силы в заданную точку называется приведением силы к заданному центру. Приведение любой системы произвольно расположенных в пространстве сил происходит путем применения Леммы Пуансо необходимого колличества раз.
Основная теорема статики (теорема Пуансо)
Любая система сил при приведении к произвольному центру заменяется одной силой и одной парой. При этом сила равна главному вектору системы сил и приложена в центре приведения, а пара имеет момент, равный главному моменту системы сил относительно центра приведения.
Следствие:
две системы сил, имеющие одинаковые главные векторы и одинаковые главные моменты относительно одного и того же центра, эквивалентны друг другу.
Теорема Вариньона:
Если система сил имеет равнодействующую, то ее момент относительно любой точки или оси равен сумме моментов всех сил системы относительно этой точки или оси.
Эта теорема часто используется на практике для вычисления момента некоторой силы в том случае, когда сложно найти плечо самой силы, но легко определить плечи ее составляющих.
1.6.2 Условия уравновешенности произвольной пространственной системы сил
Система сил в общем случае заменяется одной силой и одной парой, но сила и пара не могут уравновесить друг друга.Следовательно, для уравновешенности системы сил требуется, чтобы и сила, и момент пары были нулевыми.
Отсюда получаются условия уравновешенности произвольной пространственной системы сил в трех формах:
1) В векторной форме главный вектор системы сил и главный момент системы сил относительно некоторой точки должны быть равны нулю:
|
|
|
|
|
n R |
= 0, |
R |
|
|
|
|
∑Fi |
|
R |
= 0, |
|
|
|
|
|
|
или |
|
|
i=1 |
|
|
R |
= 0, |
|
n |
R |
R |
|
MO |
|
|
||||
|
|
|
∑MO (Fi )= 0. |
|||
|
|
|
i=1 |
|
|
|
2) В геометрической форме силовой многоугольник и многоугольник моментов должны быть замкнуты.
28
3) В аналитической форме суммы проекций сил на каждую из координатных осей и суммы моментов сил относительно каждой из координатных осей должны быть равны нулю:
Rx
Ry
Rz
Mx
MyMz
|
|
|
n |
= 0, |
|
∑ Fix |
|||
|
|
i=1 |
|
|
|
|
|
n |
|
= 0, |
∑ Fiy |
= 0, |
||
= 0, |
|
i=1 |
|
|
|
|
n |
= 0, |
|
= 0, |
|
∑ Fiz |
||
i=1 |
|
|||
или |
|
|
|
|
= 0, |
∑ M x (Fi ) = 0, |
|||
|
|
|
n |
R |
= 0, |
|
i 1 |
|
|
= 0, |
|
= |
|
|
|
|
n |
R |
|
|
∑ M y (Fi ) = 0, |
|||
|
|
i=1 |
|
|
|
|
|
|
|
|
|
n |
R |
|
|
|
∑ M z (Fi ) = 0. |
||
|
i=1 |
|
||
Таким образом, в статике для произвольной пространственной системы сил в общем случае можно составить шесть уравнений равновесия.
1.7Частные случаи систем сил
1.7.1Плоская система произвольно расположенных сил
Пусть плоскость, в которой лежат линии действия сил системы – это плоскость xy . Ось z перпендикулярна этой плоскости.
Рассматривая шесть уравнений равновесия произвольной пространственной системы сил, легко видеть, что в данном случае уравнения
n
∑ Fiz ≡ 0, i=1
n |
R |
n |
R |
∑ M y (Fi ) ≡ 0, |
∑ M x (Fi ) ≡ 0. превращаются в тождества, так как все |
||
i=1 |
|
i=1 |
|
силы перпендикулярны оси z и лежат в одной плоскости с осями x и y .
Таким образом, условия уравновешенности плоской системы сил в аналитической форме будут представлены только тремя уравнениями:
n |
|
∑Fix |
= 0, |
i=1 |
|
n |
= 0, |
∑Fiy |
|
i=1 |
|
n |
R |
∑M z (Fi ) = 0.i=1
Последнее уравнение для плоской системы сил принято записывать иначе. Вместо того чтобы говорить о «моментах сил относительно оси z , проходящей через некоторую точку О, говорят о «моментах сил относительно точки О» и
29
система уравнений записывается в виде:
n |
|
∑Fix |
= 0, |
i=1 |
|
n |
= 0, |
∑Fiy |
|
i=1 |
|
n |
R |
∑M O (Fi )= 0.i=1
Это первая (основная) форма уравнений равновесия произвольной плоской системы сил.
Равносильны еще две формы записей уравнений равновесия для плоской системы сил.
|
n |
|
∑Fiy |
= 0, |
|
i=1 |
|
|
|
n |
R |
|
|
|
∑M A (Fi ) |
||
i=1 |
|
|
n |
R |
|
∑M B (Fi )i=1
=0,
=0.
Вторая форма содержит одно уравнение проекций сил на какую-либо ось y и два уравнения моментов сил относительно точек А и В (ось y не должна
быть перпендикулярна линии АВ, иначе уравнения не будут независимы).
|
n |
R |
R |
∑M A (Fi )= 0, |
|||
i=1 |
|
|
|
|
n |
R |
R |
|
|
|
|
∑M B (Fi )= 0, |
|||
i=1 |
|
|
|
n |
R |
R |
|
∑M C (Fi )= 0.i=1
Третья форма содержит три уравнения моментов сил относительно трех произвольных точек А, В и С (при этом точки А, В и С не должны лежать на одной прямой).
1.7.2 Система пар сил
Если система сил состоит только из пар, для каждой из которых, как известно, сумма векторов сил равна нулю, то уравнения проекций сил оказываются тождествами, тогда для системы пар остаются только уравнения сумм проекций моментов пар, которые были записаны нами как уравнения:
∑mix = 0,∑m = 0,
iy
∑miz = 0.