

6848
.pdf70
Решение:
Применим теорему об изменении главного вектора количества движения систе-
мы: |
|
³ |
|
|
⁄³% ∑? |
|
´ , |
|
|
|
|
|
|||||
|
∑? |
|
|
|
´ |
±KD |
± |
|
где |
|
|
- геометрическая сумма внешних сил, которая в случае данной зада- |
|||||
|
±KD |
± |
|
|
|
|||
чи определяется как: ∑±KD? ±´ µD µ ©D¶ © ¶. |
||||||||
Получается, что сумма проекций всех внешних сил механической системы на ось |
||
х все время равна нулю, поэтому |
³ ·⁄³% ∑±KD? ±·´ |
0. |
Отсюда следует, что · HI7;%. |
|
|
Если обозначить количество движения системы в начальный момент времени как
·§, а количество движения системы в момент остановки тележки как |
·D, то из |
|||||||||
следует, что |
·§ |
|
·D. |
|
|
и составим соответствующее уравнение. |
||||
Выразим величины |
|
·§ и |
·D |
|||||||
В начальный момент времени количество движения системы равно: |
|
|||||||||
|
·§ |
©D)§ |
© ) |
|
|
|
||||
где )§ - скорость платформы, |
|
|
|
|
|
|||||
) - абсолютная скорость тележки, которая равна: |
|
|||||||||
) = )§ ² 2 2.5 4.5 |
$ |
м |
&. |
|
|
|
|
|||
|
|
|
|
|
||||||
с |
|
кг∙м |
|
|
||||||
Тогда |
·§ 160 ∙ 2 40 ∙ 4.5 500 $ |
&. |
|
|||||||
с |
|
|||||||||
В момент остановки тележки количество движения системы равно |
|
|||||||||
|
·D |
|
$©D © &) |
$160 |
40&) 200), |
|
||||
где ) - общая скорость. |
|
|
·D: |
500 200), решая которое |
определяем, |
|||||
Формируем уравнение ·§ |
|
|||||||||
|
|
|
м |
|
что скорость платформы после остановки тележки равна ) 2.5 |
|
. |
||
с |
||||
|
м |
|
|
|
Ответ: ) 2.5 |
|
. |
|
|
с |
|
|
||
3.4 Теорема об изменении кинетической энергии в интегральной форме
Изменение кинетической энергии механической системы за некоторый промежу-
ток времени равно сумме работ всех действующих в системе сил:
¸ ¸§ ∑?±KD ¹±
или, выделяя отдельно работы внешних и внутренних сил:

71
|
¸ ¸ ∑? |
|
¹´ ∑? |
¹º |
||
|
§ |
±KD |
± |
±KD |
± |
|
где T ─ |
начальное, а T0 ─ конечное значение кинетической энергии . |
|||||
Для неизменяемых систем |
|
»∑±KD? |
¹º± 0 ¼ можно записать: |
|||
|
¸ ¸§ ∑±KD? ¹´± |
|
|
|||
При поступательном движении тела кинетическая энергия равна: |
||||||
¸ D |
©)” |
|
|
|
|
|
При вращении тела относительно некоторой оси z его кинетическая энергия рав-
на: ¸ D ½•~ .
При плоскопараллельное движение тела кинетическая энергия равна:
¸пл D ©)” D ½•”~ ,
где )” скорость центра массы тела, а ½•” момент инерции тела относительно оси, проходящей через центр массы тела перпендикулярно оси вращения.
Работа силы на конечном перемещении определяется как криволинейный инте-
|
(2) |
(2) |
грал второго рода от элементарной работы: |
A12(F) = ∫ |
δA = ∫ (F·dr). |
|
(1) |
(1) |
Работа постоянной силы на прямолинейном перемещении равна произведению модуля силы на модуль перемещения и на косинус угла между направлением силы и перемещением: А12 (F ) = F cos α × S.
|
|
|
F |
||
M1 |
M |
|
M2 |
||
α |
|||||
|
|
|
|||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.7
При этом: A (F) > 0, если 0 < α < π/2, A (F) = 0, если α = π/2,
A (F) < 0, если π/2 < α < π.

72
Моментом инерции материальной точки относительно некоторой оси (осевым моментом инерции) называется величина, равная произведению массы точки на квадрат ее расстояния до этой оси: Jz = m h2 .
Моменты инерции некоторых однородных тел:
1.Тонкий прямолинейный однородный стержень массой М и длиной l:
Jz= (Ml2)/12.
2.Тонкая прямоугольная пластинка массой M и размерами a × b:
Jx = (M/12)(a2 + b2).
3.Тонкое однородное кольцо массой M и радиусом R: Jс = MR2 .
4.Тонкая круглая пластинка (однородный диск) массой M и радиусом R:
Jс = MR2/2 .
При решении задач приходится вычислять моменты инерции тел относительно осей вращения, которые не проходят через центр масс.В этом случае применяют
теорему Гюйгенса – Штайнера:
Момент инерции механической системы (тела) относительно некоторой оси равен сумме момента инерции относительно параллельной ей оси, проходящей через центр масс, и величины равной произведению массы системы на квадрат расстояния между осями: J z = J zC + md 2
Задача 3.9. Кинетическая энергия
Ступенчатое колесо радиуса , масса которого m равномерно распределена по окружности радиуса ", катится по прямолинейному горизонтальному рельсу без проскальзывания, касаясь рельса ободом радиуса 2", имея в точке С скорость )̅. Чему равна кинетическая энергия тела?
R |
|
R |
|
C |
v |
C |
v |
r |
|
r |
|
|
|
ω |
|
|
|
P |
|
|
|
Рис.3.8 |
|
Решение:

73
Так как колесо совершает плоскопараллельное движение, то его кинетическая энергия вычисляется по формуле:
|
1 |
1 |
|
||
|
¸ |
|
©)” |
|
½”~ , |
|
2 |
2 |
|||
где~ ─ угловая скорость колеса, |
)” ) ─ скорость центра масс, |
||||
½” ─ момент инерции колеса относительно оси, проходящей через центр масс |
|||||
(точку С), который равен: |
½” ©" . |
|
|
|
|
Учитывая, что колесо катится без проскальзывания и, следовательно, точка Р яв- |
|
ляется для него мгновенным центром скоростей, то ~ )”⁄¿ )⁄ . |
|
Подставляя все в формулу кинетической энергии, получим: |
|
¸ D ©) D ©" N,011 D ©) ÀD ©) ÀÁ ©) . |
|
Ответ: ¸ ÀÁ ©) . |
|
Задача 3.10. Кинетическая энергия |
|
Диск радиуса и массой |
©, которая равномерно распределена по тонкому |
стержню, проходящему через центр С, вращается относительно оси, проходящей через точку О, лежащую на ободе, перпендикулярно плоскости диска, имея в т. С скорость ).
Определить кинетическую энергию вращающегося диска. |
|||
Решение: |
|
ω |
|
Кинетическая энергия тела, вращающегося во- |
|||
|
|||
круг оси равна: |
O |
||
|
¸ D ½Â~ |
v |
|
где ½Â - момент инерции тела относительно оси |
C |
||
вращения. |
|
|
|
Момент инерции стержня относительно оси, |
|
||
проходящей через центр масс (точку С в данном |
|
||
случае) равен: |
½” DD ©: , |
|
|
где : - длина стержня. |
Рис.3.9 |
||
Поскольку |
: 2 и ½” DD ©: , то по теореме Гюйгенса-Штайнера можно |
||
определить момент инерции относительно оси вращения, проходящей через точку
О: ½Â ½” © ∙ ÿ DO © © NO © .

74
Зная эту величину, можно определить кинетическую энергия диска:
¸ D ∙ NO © ∙ ~ O © ~ .
При вращательном движении угловая скорость находится по формуле
~ )⁄ÿ )⁄ .
Тогда кинетическую энергию диска можно выразить через его массу и скорость
точки С: ¸ |
© ~ |
© Œ0 |
• |
|
©) . |
|
|
O |
O |
Š |
|
O |
|
Ответ: ¸ |
©) . |
|
|
|
|
|
|
O |
|
|
|
|
|
Задача 3.11. Кинетическая энергия В планетарном механизме с внешним зацеплением водило ОА, вращающееся во-
круг неподвижной оси О с угловой скоростью ~, приводит в движение зубчатое колесо массой ©, катящееся по неподвижному колесу 2. Если колесо 1 – однородный диск, то чему равна его кинетическая энергия?
|
ω |
|
|
v A |
R2 |
R2 |
ω |
ω1 |
|
|
R1 |
|
|
R1 |
O |
A |
O |
P |
A |
|
1 |
|
|
1 |
|
2 |
|
|
2 |
Рис.3.10
Решение:
Колесо 1 совершает плоскопараллельное движение и его кинетическая энергия равна: ¸ D ©)А D ½А~D,
Так как колесо 2 неподвижно, то точка Р является мгновенным центром скоро-
стей колеса 1. |
) ~$ D &. |
Таким образом, |
В этом случае угловую скорость колеса 1 можно определить по формуле:
~D ) ⁄¹ ~$ D &⁄ D.
Подставляя все в формулу кинетической энергии, получим:
D |
D |
© D |
ˆ1$Š‰fŠ1&1 |
O |
©~ $ D & . |
¸ |
©~ $ D & N |
Š1 |
N |
||
Ответ: ¸ NO ©~ $ D & . |
‰ |
|
|
||
|
|
|
|||
75
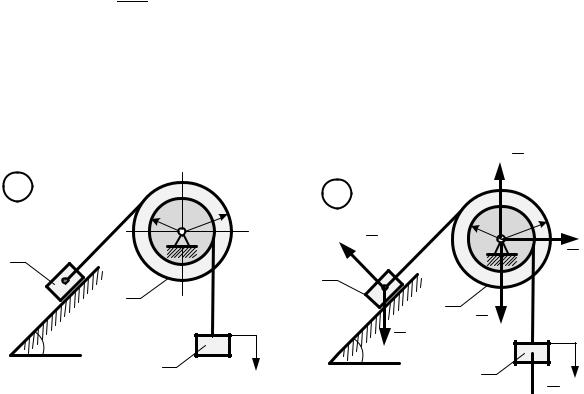
Задача 3.12. Теорема об изменении кинетической энергии Система состоит из тел 1, 2 и 3, связанных между собой посредством нерастяжи-
мых нитей. Проскальзывание нерастяжимых нитей отсутствует, силой трения пренебрегаем. Блок 2 состоит из двух ступеней разных радиусов 1.5", массы всех тел одинаковы и равны © 3 кг, угол Ä 30§. Движение начинается из положения покоя и при перемещении груза на величину Å $м& система имеет кинетическую
энергию ¸ 1.8¶ Œкг∙м1•.
с1
Найти величину перемещения Å.
Решение:
Применим теорему об изменении кинетической энергии системы:
¸D ¸§ ∑?±KD ¹´± ∑?±KD ¹º±
|
|
|
|
|
Y O |
|
r |
R |
|
|
|
O |
R |
|
|
|
|
|||
|
|
N |
|
r |
|
|
3 |
|
|
|
X O |
||
|
|
|
|
|||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
α |
α |
|
P1′ |
P 2 |
|
|
1 |
|
|
|
|
||
h |
|
|
1 |
|
h |
|
|
|
|
|
|
 P1
P1
Рис.3.11
Начальная кинетическая энергия равна нулю, то есть ¸§ 0, так как в начальный момент времени система неподвижна. Сумма работ внутренних сил равна нулю, так
как тела, образующие систему, абсолютно твердые, а нити – нерастяжимые |
|
∑±KD? ¹º± 0. |
¸D ∑±KD? ¹´±. |
Следовательно: |
|
Вычислим работу внешних сил.
К внешним силам относятся: силы тяжести: D, ′D, , реакция плоскости µ, ре-
акции шарнира О: Â, Â.
¹»µ¼ ¹» ¼ ¹» ¼ ¹» ¼ 0,
76
¹» D¼ D ∙ Å ©¶Å 3¶Å,
¹ Œ ′D• ′D ∙ Å ∙ " ∙ ;F7 30§ ©¶Å ∙ " ∙ ;F7 30§ ©¶Å ∙ 32 ∙ 12 2.25¶Å.
Составим уравнение ¸D ∑?±KD ¹´±:
1.8¶ 3¶Å 2.25¶Å, 1.8¶ 0.75¶Å,
Откуда получаем, что Å §D.ÇÁÆ.ÀÆ 2.4$м&. Ответ: Å = 2.4 м.
3.5 Принцип возможных перемещений
Для того чтобы механическая система находилась в равновесии, необходимо и достаточно, чтобы возможная работа всех активных сил на любых возможных пе-
ремещениях была равна нулю: |
ȹ 0 |
или |
∑±KD ±È"#± 0 |
. |
|
|
? |
# |
|||
Возможными перемещениями точки называются воображаемые бесконечно малые перемещения точки системы, допускаемые в каждый момент времени наложенными на нее связями.
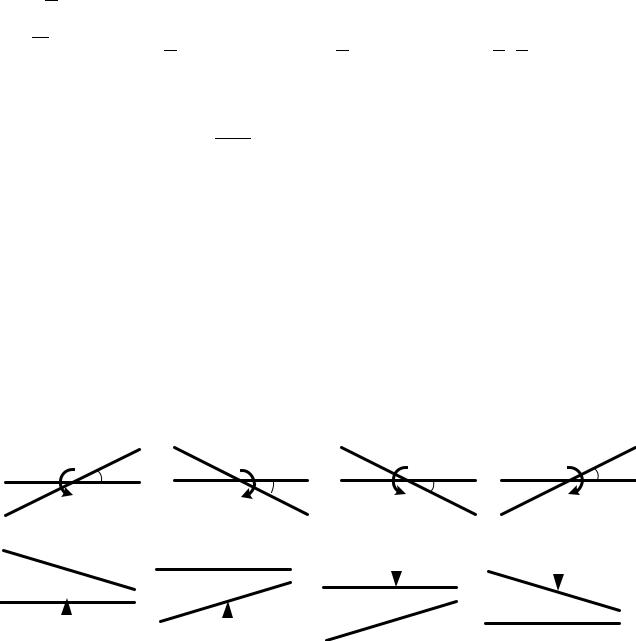
Правила определения работы силы и момента показаны на рисунке 3.12.
δ A = +M δϕ |
|
|
δ A = +M δϕ |
|
δ A = −M δϕ |
δ A = −M δϕ |
|||
|
|
М |
δϕ |
|
δϕ |
|
|
М |
|
|
М |
М |
|
|
|
|
|||
δ A = +F δ v |
|
|
|
|
F |
F |
|
δ A = −F δ v |
|
|
|
|
|
|
|||||
δ v |
|
δ v |
|
δ v |
|
|
|||
|
|
|
|
δ v |
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
F |
F |
|
δ A = −F δ v |
δ A = +F δ v |
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.3.12
Задача 3.13. Принцип возможных перемещений Определить реакции опор балки(рис.3.13,а).
Решение:
Заданная составная балка образована из четырех элементарных балок, соединенных шарнирами F, G и H, и загружена системой параллельных сил.
77
Распределенную нагрузку, приложенную к каждой из элементарных балок, заменяем равнодействующими Q1 и Q2 соответственно.
1. Для определения вертикальной составляющей в неподвижной опоре A отбросим вертикальную линейную связь, заменив ее искомой реакций YA = RA , сообщим точке A возможное перемещение δsA = AA´и построим соответствующую моду бал-
ки (рис. 3.13, б).
Уравнение для определения RА:
RА δsА + Q2δsQ2 – P 1δsG – M 1δφD – M 2δφE + P2δsP2 = 0.
Выразим все возможные – линейные и угловые перемещения точек системы через
δφE:
δsP2 = a δφE;
δφD = 2 δφE, поскольку δsH = a δφD = 2a δφE; δsG = δsH = 2a δφE;
δsQ2 = δsG = 2a δφE;
δsА = δsF = 2δsQ2 = 4a δφE.
Получаем:
(4RА + 2Q2 – 2P 1 – 2M 1/а – M 2/а + P2 ) a δφE = 0,
откуда
RА = (1/4)( – 2Q 2 + 2P1 + 2M1/а + M2/а –P 2 ) = (1/4)(– 2P + 2P + 2P + P – P) = P/2 .

78
a |
q= P/2a |
P1= P |
M1= Pa |
M2= Pa |
P2= P |
|
|
|
|
G |
H |
|
A |
B |
F |
|
C |
|
|
|
D |
|
|
|
E |
|
|
|
|
|
|
|
|
|
|||||
|
a |
a |
a |
a |
a |
|
a |
|
a |
|
a |
a |
|
A´ |
|
δsA |
|
|
|
|
|
|
|
|
|
P2= P |
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1= P |
|
|
|
G´ |
P1= P |
|
|
|
|
|
|
|
|
|
|
Q2= P |
|
M1= Pa |
|
M2= Pa |
|
|
||||
|
|
|
|
δφC |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
δφE |
E |
|
|
|
B |
F |
|
|
|
|
|
|
H |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
A |
δφB |
δsF |
|
C |
G |
δφD |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RA |
|
|
|
δsQ2 |
|
|
|
|
|
|
δsH |
|
|
|
|
|
|
|
|
|
|
|
|
|
δsP2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F´ |
|
|
|
|
|
|
|
|
|
|
|
|
δsB |
F´ |
δsF |
|
|
|
|
|
|
|
P2= P |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q1= P |
|
|
δφC |
|
P1= P |
|
|
H´ |
|
|
|||
в |
|
|
|
Q2= P |
|
M1= Pa |
|
|
|
|
|||
|
|
|
|
|
|
|
δφE |
|
|||||
|
|
B´ |
F |
|
|
|
G |
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
|
|
C |
|
|
D |
δφD |
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
||||
|
|
|
δsQ2 |
|
|
|
|
δsP2 |
|
||||
|
δφA |
|
|
|
|
|
|
M2= Pa |
|
||||
|
|
RB |
|
|
|
G´ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
δsG |
|
|
|
|
|
|
|
|
|
|
|
|
|
G´ |
|
|
|
|
|
|
г |
|
Q1= P |
|
Q2= P |
C´ |
|
P1= P |
|
|
|
|
P2= P |
|
|
|
|
|
M1= Pa |
|
M2= Pa |
|
||||||
|
|
|
δφF |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
D |
H |
|
|
|
|
A |
B |
F |
|
C |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
||||
|
δsC |
|
|
|
|
|
|
|
|
|
|||
|
|
|
δsQ2 |
|
|
δsG |
|
|
|
|
δφE |
|
|
|
|
|
|
RС |
|
|
δφD |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
δsP2 |
|
|
|
|
|
|
|
|
|
|
|
|
H´ |
δsH |
|
|
|
|
Q1= P |
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
Q2= P |
|
|
P1= P |
D´ |
|
|
P2= P |
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
G |
|
δsD |
|
|
|
|
A |
B |
F |
C |
δφG |
D
RD |
|
E |
|
H |
δφE |
|
M2= Pa |
||
|
е
Q1= P
A |
B |
Q2= P
F |
C |
Рис.3.13
P1= P |
M1= Pa |
|
G |
H |
D
M2= Pa
δφH |
E´
P2= P
E
δsE
RE
2. Для определения RB отбрасываем подвижную опору в точке В, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsB= BB´и строим соответствующую моду балки (Рис. 3.13, в).
79
Уравнение ПВП для определения RB:
(RB – Q 1) δsB – Q 2 δsQ2 + P1 δsG + M1 δφD + M2 δφE – P 2 δsP = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы через δφE:
δsP2 = a δφE;
δφD = 2 δφE, поскольку δsH = a δφD = 2a δφE; δsG = δsH = 2a δφE;
δsQ2 = δsG = 2a δφE;
δsB = (1/2)δsF = δsQ2 = 2a δφE.
Получаем: (2RB – 2Q 1 – 2Q 2 + 2P1 + 2M1/а + M2/а – P 2 ) a δφE = 0,
откуда
RB =(1/2)(2Q1 2Q2 –2P 1 –2M 1/а –M 2/а +P2)=(1/2)(2P +2P –2P –2P –P +P)= 0 .
3. Чтобы найти RС отбрасываем подвижную опору С, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsС= CC´и строим соответствующую моду балки (рис. 3.13, г).
Соответствующее уравнение ПВП примет вид:
– Q 2 δsQ2 + RС δsС – P 1 δsG – M 1 δφD – M 2 δφE + P2 δsP = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы через δφF:
δsQ2 = a δφF; δsС = 2a δφF; δsG = 3a δφF;
δφD = 3 δφF, поскольку δsG= a δφD = 3a δφF;
δφE = (1/2)δφD = (3/2) δφF, поскольку δsH = a δφD = 2a δφE; δsP = a δφE = (3/2)aδφF.
Получаем: [–Q 2 + 2RС – 3P 1 –(3/a)M 1 –(3/2a)M 2 +(3/2) P2] a δφF=0, откуда RС=(1/2)(Q2+3P1+(3/a)M1+(3/2a)M2–(3/2)P 2)=
=(1/2[P+3P+3P+(3/2)P–(3/2)P]=(7/2)P .
4. Для определения RD отбрасываем подвижную опору в точке D, заменяя ее неизвестной реакцией, сообщаем этой точке возможное перемещение δsD = DD´и строим соответствующую моду балки (рис. 3.13, д).
Уравнение ПВП для определения RD:
RD δsD + M1 δφG + M2 δφE – P 2 δsP2 = 0.
Выражаем все возможные – линейные и угловые перемещения точек системы че-
рез δφE: δsD = δsP2 = aδφE ;
δφG = δφE , поскольку δsH = 2a δφD = 2a δφE.