

Мінаєв Ю.М. ІЗДКС – Лаб.практ, № 2, управління Simulink-моделлю з МатЛаб
КОМП'ЮТЕРНЕ МОДЕЛЮВАННЯ інтелектуальних інструментальних засобів дослідження компъютерных СИСТЕМ У СЕРЕДОВИЩІ MATLAB/SIMULINK
Лабораторний практикум
Ч а с т и н а 2
Керування Simulink-моделлю з matlab
І
При організації чисельних експериментів у SIMULINK може виникнути необхідність багаторазово запускати ту ж саму модель з різними параметрами і вхідними сигналами. Це можна забезпечити, керуючи процесом моделювання з командного вікна. Насамперед, необхідно відкрити Simulink-модель вручну чи за допомогою команди open. Так, команда open('vdp'). відкриває модель vdp.mdl (схема моделювання рівняння Вандерполя). Щоб запустити процес моделювання з командного рядка використовується команда sim, наприклад sim('vdp'). Як параметри цій команді можна передати час моделювання, вхідний сигнал (при наявності вхідних портів у моделі), початкові умови й опції решателя. У цьому випадку синтаксис її виклику буде мати вид
y=sim('model',timespan,options,ut),
де timespan – інтервал моделювання, ut – масив, що складається з отсчетов часу і значень вхідного сигналу.
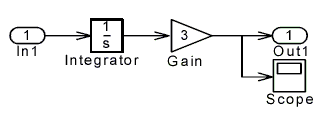
Приклад 3. Створимо модель, показану на рис., і збережемо її під ім'ям simple_mo-del. Знайдемо її реакцію на синусоїду на інтервалі 30 с. Опцій моделювання використовувати не будемо – як аргумент візьмемо порожній масив.
|
|

Після виконання цих команд можна відкрити блок Scope у схемі і побачити результати моделювання. Помістити результати моделювання в робочий простір і потім подивитися графік за допомогою команди plot можна, використовуючи виклик sim з вихідними параметрами.При виклику команди sim з опціями решателя структура опцій задається командою simset. Для приклада змінимо тип решателя на ode23:
>> [t2,y2]=sim('simple_model',[0 30],simset ('Solver','ode23'),[t' sin(t')]);
З повним списком опцій моделювання можна ознайомитися, використовуючи команду simget, наприклад o=simget ('simple_model').Крім завдання опцій моделювання, існує можливість програмно змінювати параметри блоків.
Для їхнього читання і запису використовують команди get_param і set_param. Оскільки назви параметрів блоків не завжди збігаються з текстами пояснень у вікні параметрів, буває корисна конструкція get_param(gcb, 'objectparameters'). Мишею у вікні моделі вибирається потрібний блок. Після цього команда gcb повертає ім'я поточного блоку.
Так, якщо буде виділений блок Gain, команда gcb поверне рядок 'simple_model/ Ga-in'. За допомогою тієї ж функції get_param можна одержати будь-як конкретний параметр, наприклад:
>>p=get_param('simple_model/Gain', 'Gain'), class(p)
p =3
ans =
сhar
Зверніть увагу на те, що тип параметра – рядок. Це значить,що якщо, наприклад, необхідно змінити коефіцієнт підсилення з 3 на 4 за допомогою функції set_param, то прийдеться набрати не set_param('simple_model/Gain', 'Gain',4), а set_param('simple_model/Gain', 'Gain', num2str(4)). Використання цих команд дозволяє, зокрема, організувати циклічну зміну параметрів схеми моделювання (коефіцієнтів підсилення, початкових умов) за допомогою оператора MATLAB for.
Приклад 4 (задача
про оптимальні початкові умови). Рух
маятника описується нелінійним
диференціальним рівнянням
![]() .
Його початкові умови задовольняють
умові
.
Його початкові умови задовольняють
умові
![]() (лежать на колі радіуса R у
фазовій площині). Потрібно знайти
значення
(лежать на колі радіуса R у
фазовій площині). Потрібно знайти
значення
![]() ,
при яких енергія вихідного сигналу
буде максимальної
або мінімальною:
,
при яких енергія вихідного сигналу
буде максимальної
або мінімальною:![]() .
.
Рішення. Складемо схему моделювання в SIMULINK і назвемо її sys.mdl (рис. ). Розглянемо два способи пошуку оптимальних початкових умов.
Спосіб 1 (одновимірний лінійний пошук).Будемо запускати схему з різних початкових умов, обчислюючи щораз енергію Е и запам'ятовуючи результат, а потім виберемо екстремальні значення.

Рис. Sys.mdl
Початкові умови будемо формувати в
MATLAB за формулами
![]() Програму для керування
процесом моделювання оформимо
у вигляді
окремого m_файлу
optic.m.
Програму для керування
процесом моделювання оформимо
у вигляді
окремого m_файлу
optic.m.
Program optic %Optimal Initial Condition for sys.mdl
open('sys'); % виклик моделі sys.mdl
E=zeros(1,200); R=1; % масив для запису енергій
for і=1:200
x0=R*cosd(і); y0=R*sind(і); % чергові початкові умови
set_param('sys/х','initial',num2str(x0)); % установка початкових умов
set_param('sys/у','initial',num2str(y0));
sim('sys',[0,40],[],[]); % запуск моделювання
E(i)=trapz(tout,yout.^2); % обчислення енергії
disp(i); % висновок поточного i на екран
end
plot(E,'LineWidth',2);grid % графік залежності енергії
title('ENERGY vs. IC angle'), % від кута на одиничній окружності
Результат моделювання для R = 1 показаний на рис.
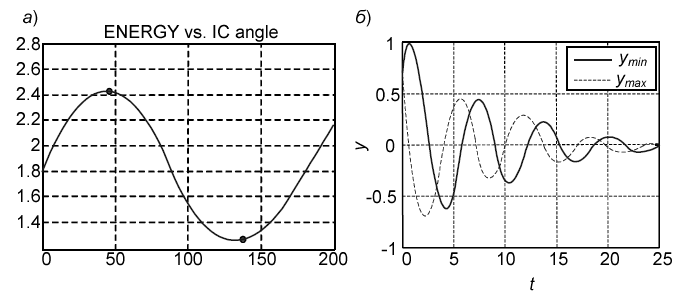
З графіка видно, що максимальна енергія вихідного сигналу приблизно дорівнює 2,4.Більш точні дані одержуємо, додаючи в програму наступні команди:
[EM,iM=max(E);
x0M=cosd(iM);
y0M=sind(iM);
disp('im,x0m y0m Em='),[im,x0m y0m Em],
[Em,im]=min(E);
x0m=cosd(im);
y0m=sind(im);
disp('iM,x0M y0M EM='),[iM,x0M y0M EM],
Результат їхнього виконання:
iM,x0M y0M EM = 47 0.6820 0.7314 2.4118
im,x0m y0m Em = 136 _0.7193 0.6947 1.2637
Таким чином, максимальна енергія
вихідного сигналу, рівна Е = 2,412,
досягається при =
47про, тобто при початкових умовах
![]() (маятник відхиляємо вправо і штовхаємо
від положення рівноваги).
Мінімальна енергія вихідного сигналу,рівна
Е = 1,264, досягається при
= 136про, тобто при початкових умовах
(маятник відхиляємо вправо і штовхаємо
від положення рівноваги).
Мінімальна енергія вихідного сигналу,рівна
Е = 1,264, досягається при
= 136про, тобто при початкових умовах
![]() маятник відхиляємо вліво і
штовхаємо до положення
рівноваги). Відповідні
графіки приведені на
рис. Б (вгоры).
маятник відхиляємо вліво і
штовхаємо до положення
рівноваги). Відповідні
графіки приведені на
рис. Б (вгоры).
Змінимо радіус R окружності
початкових умов, узявши його близьким
до критичного значення, при якому кут
у відхилення
маятника наближається до .
У цьому випадку маятник починає «зависати»
у верхнім положенні,
що приводить до різкого збільшення
енергії вихідного сигналу
(![]() ). На рис. а
(внизу) показані графіки енергії
Е в залежності від кута
_ і максимального і мінімального вихідного
сигналу в у
залежності від часу (рис., б) для R
= 2,29, там же приведені
чисельні значення екстремальних
параметрів.
). На рис. а
(внизу) показані графіки енергії
Е в залежності від кута
_ і максимального і мінімального вихідного
сигналу в у
залежності від часу (рис., б) для R
= 2,29, там же приведені
чисельні значення екстремальних
параметрів.

Спосіб 2 (пошук екстремума за допомогою функції fmincon- рішення задач на умовний і безумовний екстремум. У даному випадку треба знайти екстремуми функції Е (енергії вихідного сигналу), що залежить від двох аргументів (початкових умов маятника) при наявносты обмеження (сума квадратів початкових умов фіксована):
![]()
Для рішення таких задач призначена команда fmincon.Для її застосування потрібно створити дві допоміжні функції, що містять опис критерію, що мінімізується, й обмежень. Оформимо ці функції у вигляді m-файлів з іменами
energy і nlcon:

Запускаємо процес оптимізації, набираючи в робочому вікні команду fmincon:
>> [X,E]=fmincon('energy',[1;1],[],[],[],[],[],[],'nlcon')
По закінченні ітераційного процесу одержуємо повідомлення про його успішне завершення і значення вихідних параметрів (вектор початкових умов і мінімальну енергію для R = 1). Щоб вирішити задачу про максимальну енергію, потрібно змінити знак перед командою trapz в останньому рядку функції energy і повторити обчислення. У результаті одержуємо
R=1 norm(X) E=trapz(tout,yout.^2) R=1 norm(X) E=-trapz(tout,yout.^2)
X =0.7198 1 E =1.2637 X = 0.6844 1 E = -2.4118
-0.6942 0.7291
Знайдені значення близькі до отриманих першим способом, але більш точні. Виконуючи аналогічні обчислення для R = 2.29, також одержуємо уточнені значення оптимальних початкових умов:
R=2.29 norm(X) E=_trapz(tout,yout.^2) R=2.29 norm(X) E=trapz(tout,yout.^2)
X = 1.7201 2.2900 E =-51.8823 X = 1.2100 2.2900 E = 6.5955
1.5118 - _1.9442
Звернемо увагу на два нюанси в оформленні функції energy.Якщо в другому рядку забрати знак коментарю (%), то виклик моделі sys.mdl і перемальовування схеми моделювання буде відбуватися на кожнім кроці ітераційного процесу, що сильно збільшить час
Рі-шення. Простіше відкрити цю модель вручну до початку рішення, тоді команда open('sys') не буде потрібно. Другий нюанс стосується синтаксису команди num2str(x0,15). Її другий аргумент задає кількість розрядів числа x0, преутворених у рядок. Якщо його опустити,то за замовчуванням воно може виявитися рівним 4, що цілком спотворить результати оптимізації.
З подібними тонкостями нерідко приходиться зустрічатися при моделюванні в MATLAB і інших пакетах. Вони вимагають від користувача гарного розуміння сутності розв'язуваної задачі і застосовуваного математичного апарата з одного боку, і знання мови програмування і розуміння процесу комп'ютерної реалізації використовуваного алгоритму – з іншого
ІІ