

1.4 Плоская система произвольно расположенных сил
Главный момент системы сил равен алгебраической сумме моментов сил системы относительно точки приведения.
Главный вектор равен геометрической сумме векторов произвольной плоской системы сил.
Условие равновесия произвольной плоской системы сил
1. При равновесии
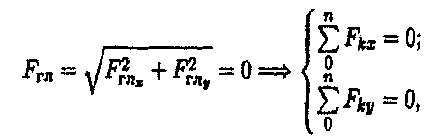
главный вектор системы равен нулю
Аналитическое
определение главного вектора приводит
к выводу:![]()
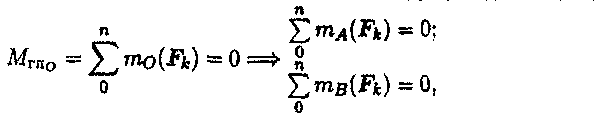
2, Поскольку точка приведения выбрана произвольно, ясно, что при равновесии сумма моментов сил системы относительно любой точки на плоскости должна равняться нулю.

11
Для того, чтобы твердое тело под действием произвольной плоской системы сил находилось в равновесии, необходимо, чтобы алгебраическая сумма проекций всех сил системы на две взаимно перпендикулярные оси координат и алгебраическая сумма моментов всех сил системы относительно любой точки плоскости равнялись нулю. Получим основную форму уравнения равновесия:
Порядок решения задач
1 .Показать на рисунке активные силы и реакдии связей.
2. Выбрать оси координат так, чтобы линия действия хотя бы одной из
сил совпадала с одной из осей.
3.Составить уравнения равновесия в проекциях на заданные оси.
4.Определить из уравнений искомые величины.
5. Проанализировать ответ.
Пример решения задачи
Одноопорная (защемленная) балка нагружена сосредоточенными силами и парой сил (рис. 17). Определить реакций заделки.
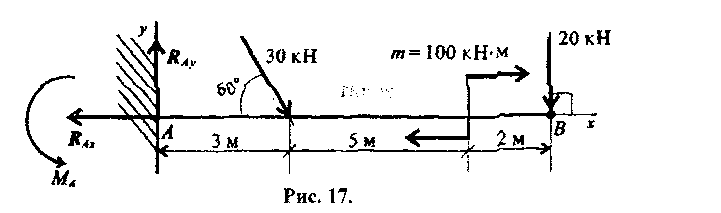
Решение
1. В
заделке может возникнуть реакция,
представляемая двумя
составляющими![]() и
опорный момент Мд- Наносим на схему
балки
возможные направления реакций.
и
опорный момент Мд- Наносим на схему
балки
возможные направления реакций.
Замечание. Если направления выбраны неверно, при расчетах получим отрицательные значения реакций. В этом случае реакции на схеме следует направить в противоположную сторону, не повторяя расчета.
В силу малой высоты считают, что все точки балки находятся на одной прямой; все три неизвестные реакции приложены в олной точке. Для решения удобно использовать систему уравнений равновесия в первой форме. Каждое уравнение будет содержать одну неизвестнлто.
2. Используем систему уравнений:
Знаки полученных реакций (+), следовательно, направления реакций выбраны верно.
12
■
![]()
Подставляем значения найденных реакций
3. Для проверки правильности решения составляем уравнение моментов относительно точки R.

Решение выполнено верно.
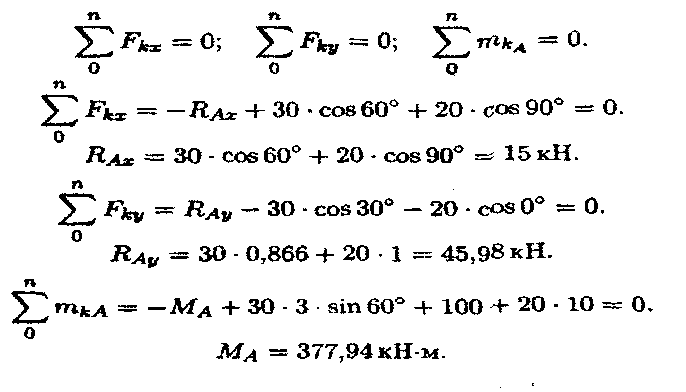
Задачи для самостоятельного решения Задача № 3
13
Определить момент результирующей пары сил
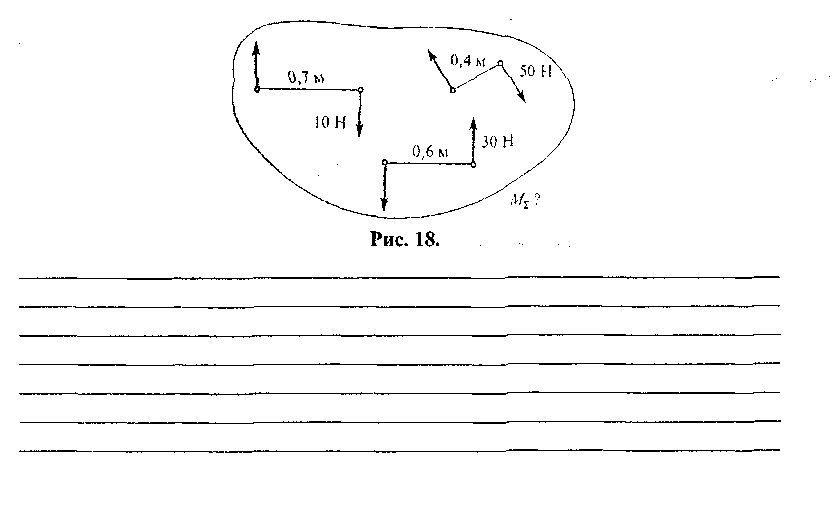
Задача № 4
Контрольные вопросы
1. Что называется парой сил?
![]()
Определить алгебраическую сумму моментов сил относительно точки В
2. В чем состоит эффект воздействия пары сил на тело?
![]()
3, Как определяется момент пары сил?

4. Чему равен момент силы относительно точки?

14
5. Когда момент силы относительно точки равен нулю?
![]()
Кинематика