

2. Принцип действия гониометрической антенной системы
Одним из важнейших узлов автоматического радиокомпаса является гонио-метрическая антенная система.
Р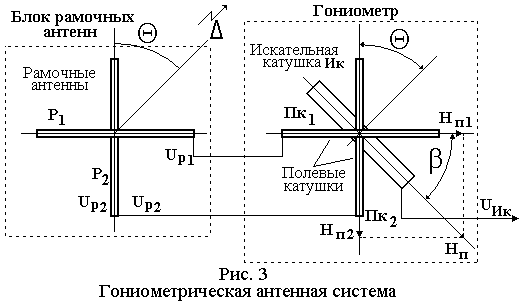 азмещение
вращающейся рамочной антенны на фюзеляже
современного скоростного самолета
вызывает ряд проблем. Поэтому в современных
АРК используется блок неподвижных
рамочных антенн, образованный двумя
взаимно перпендикулярными (продольной
и поперечной) рамочными антеннами (Р1 и
Р2) (рис. 3).
азмещение
вращающейся рамочной антенны на фюзеляже
современного скоростного самолета
вызывает ряд проблем. Поэтому в современных
АРК используется блок неподвижных
рамочных антенн, образованный двумя
взаимно перпендикулярными (продольной
и поперечной) рамочными антеннами (Р1 и
Р2) (рис. 3).
Передача сигнала с блока рамочных антенн в приемник АРК осуществляется с помощью гониометра – бесконтактного индукционного преобразователя, состоящего из двух взаимно перпендикулярных полевых катушек Пк1 и Пк2, каждая из которых электрически связана с одной из неподвижных рамок, и подвижной искательной катушки (ИК), расположенной между ними. Искательная катушка может поворачиваться в пространстве внутри полевых катушек с помощью миниатюрного электродвигателя.
Сигналы рамочных антенн имеют вид:
![]() (3)
(3)
![]() =
=![]() (4)
(4)
Из формул (3) и (4) видно, что фаза сигнала на выходе рамочной антенны отличается от фазы поля возбуждающей радиоволны (1) на 90.
Напряжения UP1 и UP2 вызывают появление токов в полевых катушках, которые, в свою очередь, создают магнитные поля HП1 и HП2 (рис. 3).
Токи в полевых катушках гониометра, создаваемые напряжениями UP1 и UP2, и магнитные поля HП1 и HП2 сдвинуты на 90 по отношению к напряжениям (2,3):
![]()
![]()
Вектор результирующего магнитного поля НП в гониометре равен геометрической сумме векторов HП1 и HП2 (рис. 3), а его модуль определяется выражением:
![]()
Положение вектора
НП в пространстве определяется углом
β и как видно из рисунка 3:
![]() .
(5)
.
(5)
Если рамочные антенн и полевые катушки полностью идентичны, то НП1 = НП2 и углы β и Θ равны между собой: β = Θ. Таким образом, создаваемое полевыми катушками гониометра результирующее магнитное поле является точным аналогом внешнего поля, воздействующего на блок рамочных антенн.
В этом случае, сигнал, снимаемый с искательной катушки, будет определяться соотношением, приведенным ранее (1):
![]() .
.
Вращение искательной катушки эквивалентно вращению рамочной антенны, при котором происходит поворот ее диаграммы направленности. Положение искательной катушки, когда напряжение на её выходе UИк равно нулю, соответствует отсчету КУР (угла Θ).
3. Функциональная схема арк.
Функциональная схема АРК с внутренней амплитудной модуляцией замкнутого типа приведена на рис. 4.
С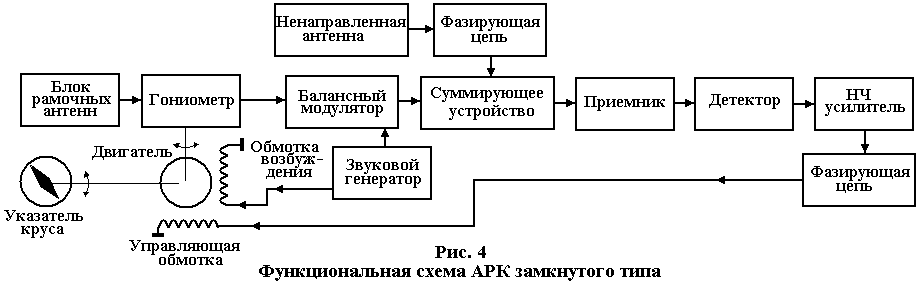 игнал
пеленгуемой радиостанции воспринимается
блоком рамочных антенн и через гониометр
поступает на фазосдвигающую цепь.
Сдвинутый по фазе сигнал искательной
катушки подается на первый вход балансного
модулятора. На второй вход которого
поступает низкочастотный сигнал местного
звукового генератора. Сигнал с выхода
балансного модулятора поступает в
суммирующее устройство. На него же
подается сигнал ненаправленной антенны.
Сигнал с суммирующего устройства
поступает в собственно приемник АРК,
где происходит его фильтрация, усиление
и детектирование. Низкочастотный сигнал
с выхода детектора имеет амплитуду
пропорциональную величине отклонения
перпендикуляра к искательной катушке
относительно пеленгуемой радиостанции,
а фаза сигнала определяет сторону
отклонения. После НЧ усилителя обработанный
сигнал сдвигается на 900.
Это связано с
особенностями работы исполнительного
двигателя. Для того, чтобы статорные
обмотки двигателя создавали вращающееся
магнитное поле, требуется, чтобы между
напряжениями на обмотках возбуждения
и управления был фазовый сдвиг, равный
90˚. Вращение вала двигателя через
понижающий редуктор передается на
привод искательной катушки гониометра
и стрелку указателя курса. Вращение
двигателя прекращается, когда амплитуда
сигнала с искательной катушки не станет
равна нулю. В этом случае на указателе
курса будет отображаться курсовой угол
радиостанции.
игнал
пеленгуемой радиостанции воспринимается
блоком рамочных антенн и через гониометр
поступает на фазосдвигающую цепь.
Сдвинутый по фазе сигнал искательной
катушки подается на первый вход балансного
модулятора. На второй вход которого
поступает низкочастотный сигнал местного
звукового генератора. Сигнал с выхода
балансного модулятора поступает в
суммирующее устройство. На него же
подается сигнал ненаправленной антенны.
Сигнал с суммирующего устройства
поступает в собственно приемник АРК,
где происходит его фильтрация, усиление
и детектирование. Низкочастотный сигнал
с выхода детектора имеет амплитуду
пропорциональную величине отклонения
перпендикуляра к искательной катушке
относительно пеленгуемой радиостанции,
а фаза сигнала определяет сторону
отклонения. После НЧ усилителя обработанный
сигнал сдвигается на 900.
Это связано с
особенностями работы исполнительного
двигателя. Для того, чтобы статорные
обмотки двигателя создавали вращающееся
магнитное поле, требуется, чтобы между
напряжениями на обмотках возбуждения
и управления был фазовый сдвиг, равный
90˚. Вращение вала двигателя через
понижающий редуктор передается на
привод искательной катушки гониометра
и стрелку указателя курса. Вращение
двигателя прекращается, когда амплитуда
сигнала с искательной катушки не станет
равна нулю. В этом случае на указателе
курса будет отображаться курсовой угол
радиостанции.