

Казанский национальный исследовательский технический университет
им А.Н. Туполева
Кафедра конструирования и производства микроэлектронной аппаратуры
Методические указания
К лабораторной работе
Изучение принципа действия и функциональной схемы автоматических радиокомпасов
Казань, 2010 г.
1. Принцип действия
Автоматический радиокомпас (АРК) представляет собой бортовой автоматический радиопеленгатор, с помощью которого определяется направление на приводные (ПРС) и широковещательные радиостанции. С помощью АРК измеряется курсовой угол радиостанции (КУР) угол в горизонтальной плоскости между направлением продольной оси ВС и направлением на ПРС. КУР отсчитывается по часовой стрелке.
АРК работают в диапазоне частот 150...2000 кГц и предназначены для решения задач самолетовождения и посадки. В настоящее время они применяются как самостоятельно, так и в составе бортовых навигационных комплексов в качестве резервного радионавигационного средства.
Д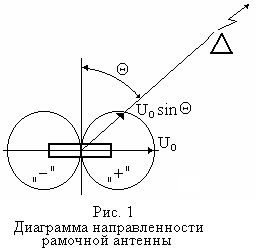 ля
определения направления на пеленгуемую
радиостанцию необходима направленная
антенна. В АРК для этого используется
рамочная антенна (РА). Ее диаграмма
направленности (рис.1) после нормировки
может быть записана в виде :
ля
определения направления на пеленгуемую
радиостанцию необходима направленная
антенна. В АРК для этого используется
рамочная антенна (РА). Ее диаграмма
направленности (рис.1) после нормировки
может быть записана в виде :
![]() ,
,
где - угол, отсчитываемый от перпендикуляра к рамке. Положительными считаются углы, отсчитываемые относительно перпендикуляра к рамке по часовой стрелке. Диаграмма направленности антенны имеет два минимума – при углах, равных 0 и 1800.
Для электромагнитного поля
![]() ;
;
![]() (1)
(1)
напряжение с рамочной антенны будет иметь вид:
![]() .
(2)
.
(2)
А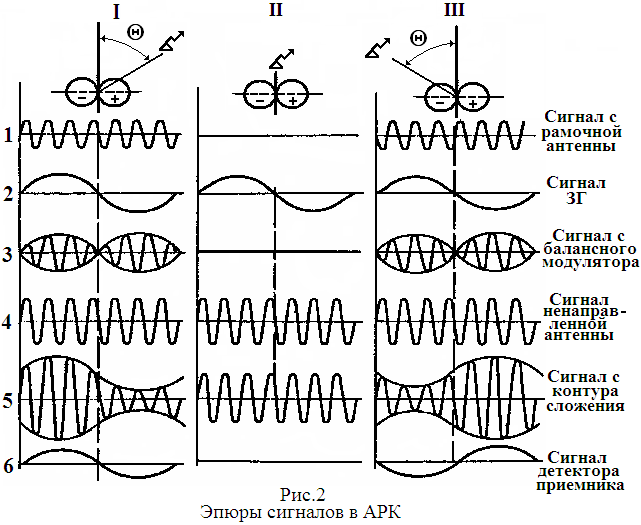 мплитуда
прини-маемого сигнала одинакова для
направлений, симметрич-ных относительно
пер-пендикуляра к рамке. Фазы же сигналов
для данных направлений противоп-оложны
и фаза может принимать два значения:
или 0, или π
(знаки "+" и "−" на рис.1) (Рис.2
эпюра1) .
мплитуда
прини-маемого сигнала одинакова для
направлений, симметрич-ных относительно
пер-пендикуляра к рамке. Фазы же сигналов
для данных направлений противоп-оложны
и фаза может принимать два значения:
или 0, или π
(знаки "+" и "−" на рис.1) (Рис.2
эпюра1) .
При угле = 0 UP = 0, а при = π/2 UP = UPMAX.
При определении направления по методу минимума рамка разво-рачивается в положение минимального принимаемого сигнала, т.е. определяется значение угла Θ (КУР).
Для создания устройства, автоматически разворачивающего рамку в направлении пеленгуемой радиостанции, необходимо сформировать сигнал, амплитуда которого определяет величину отклонения рамки (угол Θ), а фаза – направление отклонения.
Кажется, что в чистом виде сигнал с рамочной антенны вполне подходит для этих целей, а именно: амплитуда сигнала определяет величину угла отклонения перпендикуляра к рамке относительно радиостанции, а фаза сторону отклонения перпендикуляра к рамке относительно пеленгуемой радиостанции. Но проблема в том, что в месте приема невозможно однозначно определить фазу сигнала с рамки. Нет точки отсчета. Поэтому в качестве опорного сигнала используют сигнал ненаправленной антенны (ННА), фаза которого не зависит от направления приема:
![]() .
.
Фаза этого сигнала синфазна электромагнитному полю (1) и принимается равной нулю. Однако, между сигналами рамочной и ненаправленной антенн имеется сдвиг 900. Потому для устранения 900 фазового сдвига сигнал РА или ННА сдвигают на 900, используя фазосдвигающую цепь. Пусть сдвигается сигнал ННА (Рис.2 эпюра 4). В этом случае имеем:
![]() .
.
Поскольку радиокомпас автоматический, то в нем должны быть предусмотрены устройства осуществляющие поворот рамки в направлении пеленгуемой радиостанции и вращение стрелки указателя курса. Для этих целей широко используются электродвигатели переменного тока. Поэтому управляющий сигнал формируется на низкой частоте. Для этого в АРК имеется местный генератор звуковой частоты (ЗГ) с частотой Ω ≈100…200 Гц (Рис. 2).
Сигналы РА и ЗГ
поступают на балансный модулятор (БМ).
Балансный модулятор осуществляет
амплитудную модуляцию с подавлением
несущей и может рассматриваться как
устройство перемножения сигналов рамки
и ЗГ :![]() .
В этом случае на выходе БМ действует
сигнал (рис. 2 эпюра 3):
.
В этом случае на выходе БМ действует
сигнал (рис. 2 эпюра 3):
![]() .
.
Суммирующее устройство осуществляет сложение сигналов ННА и сигнала с выхода БМ и на вход приемника поступает напряжение (рис. 2 эпюра 5):
![]() ,
где
,
где
![]() .
.
Видно, что на вход приемника поступает амплитудно-модулированный сигнал на частоте пеленгуемой радиостанции. Частота модуляции несущей ωt определяется частотой ЗГ. Причем, фаза огибающей зависит от стороны положения пеленгуемой радиостанции относительно перпендикуляра к рамке. Если ПРС находится справа от перпендикуляра к рамке, т.е 0<Θ<1800, то m(Θ)>0 и огибающая модулированного сигнала синфазна напряжению ЗГ.
Если же ПРС находится слева от перпендикуляра к рамке, т.е. -1800<Θ<0, то m(Θ)<0 и огибающая АМ-сигнала противофазна напряжению ЗГ.
После усиления сигнала в приемнике на выходе амплитудного детектора выделяется огибающая АМ-сигнала (рис 2 эпюра 6):
UНЧ= UНЧ0m(Θ)SinΩt.
Видно, что в НЧ сигнале с частотой ЗГ в его фазе (знак m(Θ)) заложена информация о стороне отклонения перпендикуляра к рамке относительно пеленгуемой радиостанции, а в его амплитуде – величина угла отклонения. Это напряжение является напряжением рассогласования, которое подается на схему привода рамки. Привод рамки и стрелки указателя КУР выполняются на двигателях переменного тока. Двигатель имеет две обмотки: обмотку возбуждения и управляющую обмотку. На обмотку возбуждения подается сигнал с ЗГ, а на управляющую обмотку усиленный сигнал с выхода детектора. Если фаза сигнала детектора 0, то вал двигателя вращается, например, по часовой стрелки и перпендикуляр к рамке поворачивается в направлении пеленгуемой радиостанции. Если же фаза сигнала π, то вал двигателя вращается против часовой стрелке и опять таки перпендикуляр к рамке поворачивается в направлении пеленгуемой радиостанции. Вращение двигателя и, соответственно, рамки прекращается, когда перпендикуляр к рамке направлен на пеленгуемую радиостанцию, так как в этом случае сигнал на управляющей обмотке двигателя будет равен нулю, на указателе будет отображаться курсовой угол радиостанции.
Такие АРК являются радиокомпасами с внутренней амплитудной модуляцией и относятся к АРК замкнутого типа.