

2. Краткие сведения из теории
Механика изучает движение и взаимодействие материальных тел в пространстве и с течением времени. Количественной мерой взаимодействия тел является сила. Раздел механики, изучающий правила эквивалентного преобразования и условия равновесия системы сил, называется статикой. Силой в механике называют меру механического взаимодействия материальных тел. Сила является векторной величиной, характеризуемой числовым значением, линией и направлением действия, точкой приложения. Обычно полагают, что точкой приложения является элементарная частица тела, к которой непосредственно приложена сила. Такие силы называют сосредоточенными. В действительности, часто приходится иметь дело с силами, приложенными к части объема тела, его поверхности или какой-либо линии. Такие силы называют распределенными. В соответствии с основной теоремой статики произвольную распределенную систему сил всегда можно привести к более простой эквивалентной системе, состоящей из одной силы и одной пары. Правила такого преобразования приведены в пособии [Г.Т. Алдошин. СТАТИКА. Уч.пособие. СПб, БГТУ, 1999. 91с].
Силы, действующие на систему, разделяются на внешние силы, действующие на данную систему со стороны тел, не входящих в рассматриваемую систему, и внутренние силы взаимодействия между телами рассматриваемой системы.
Тело называется свободным, если
его перемещение в пространстве ничем
не ограничено. В противном случае тело
называется несвободным. Материальные
тела, ограничивающие свободу движения
рассматриваемого тела, называются
связями. Силы, с которыми связи
действуют на тело, называются реакциями
связей. Значение реакции связи
заранее неизвестно и зависит от вида
связи, от других приложенных к телу сил
и должно определяться в результате
решения конкретной задачи. Реакция
связи направлена в сторону,
противоположную тому направлению, по
которому связь не дает перемещаться
телу. Согласно аксиоме освобождаемости
от связей несвободное тело можно
рассматривать как свободное, если
отбросить связи, заменив их действие
силами реакций. Тогда при перечислении
всех сил, приложенных к телу, в их число
необходимо включать и силы реакций. На
несвободное тело всегда действуют два
вида сил:
заданные силы, независящие от связей,
которые называют активными силами,
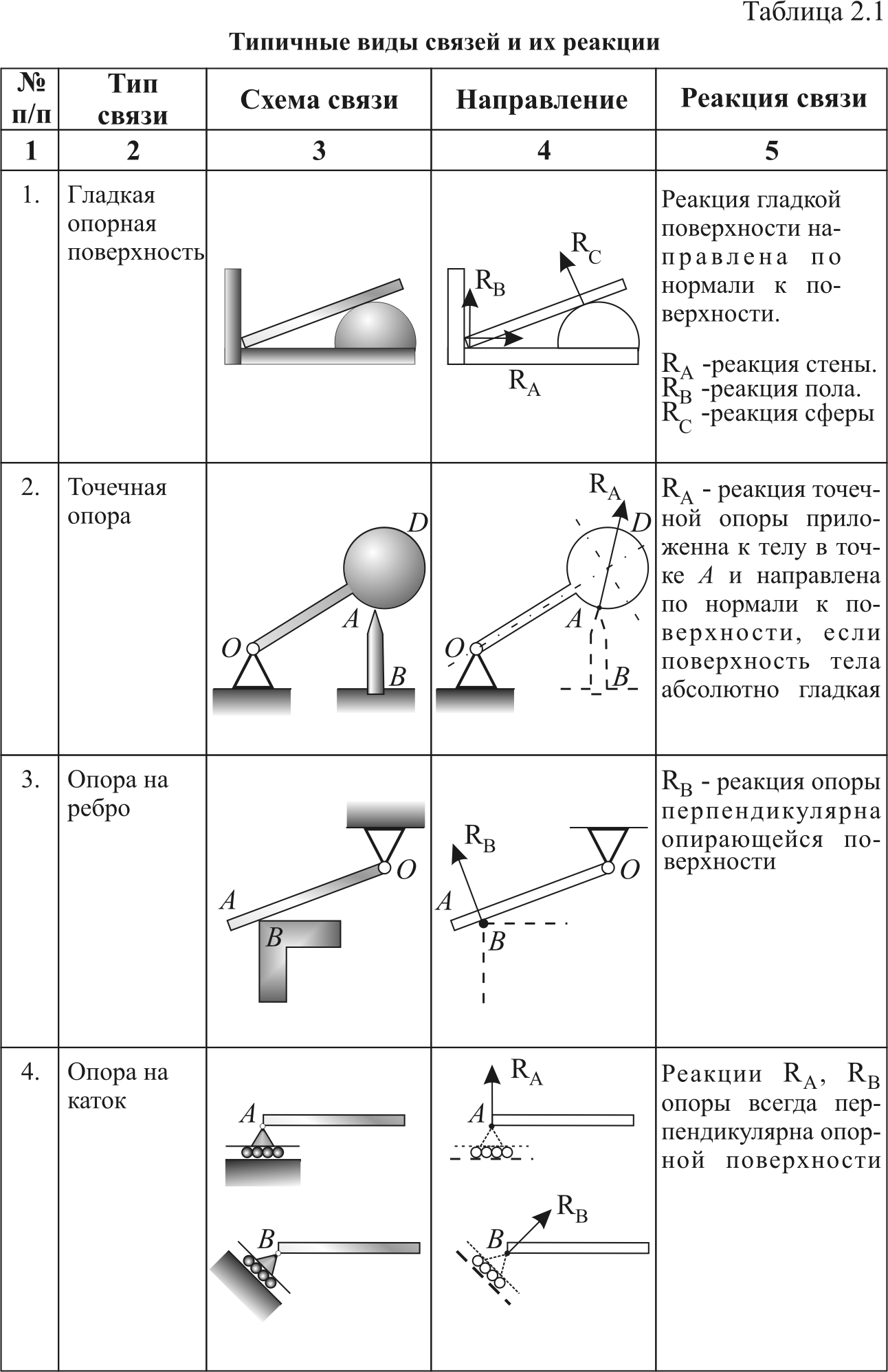
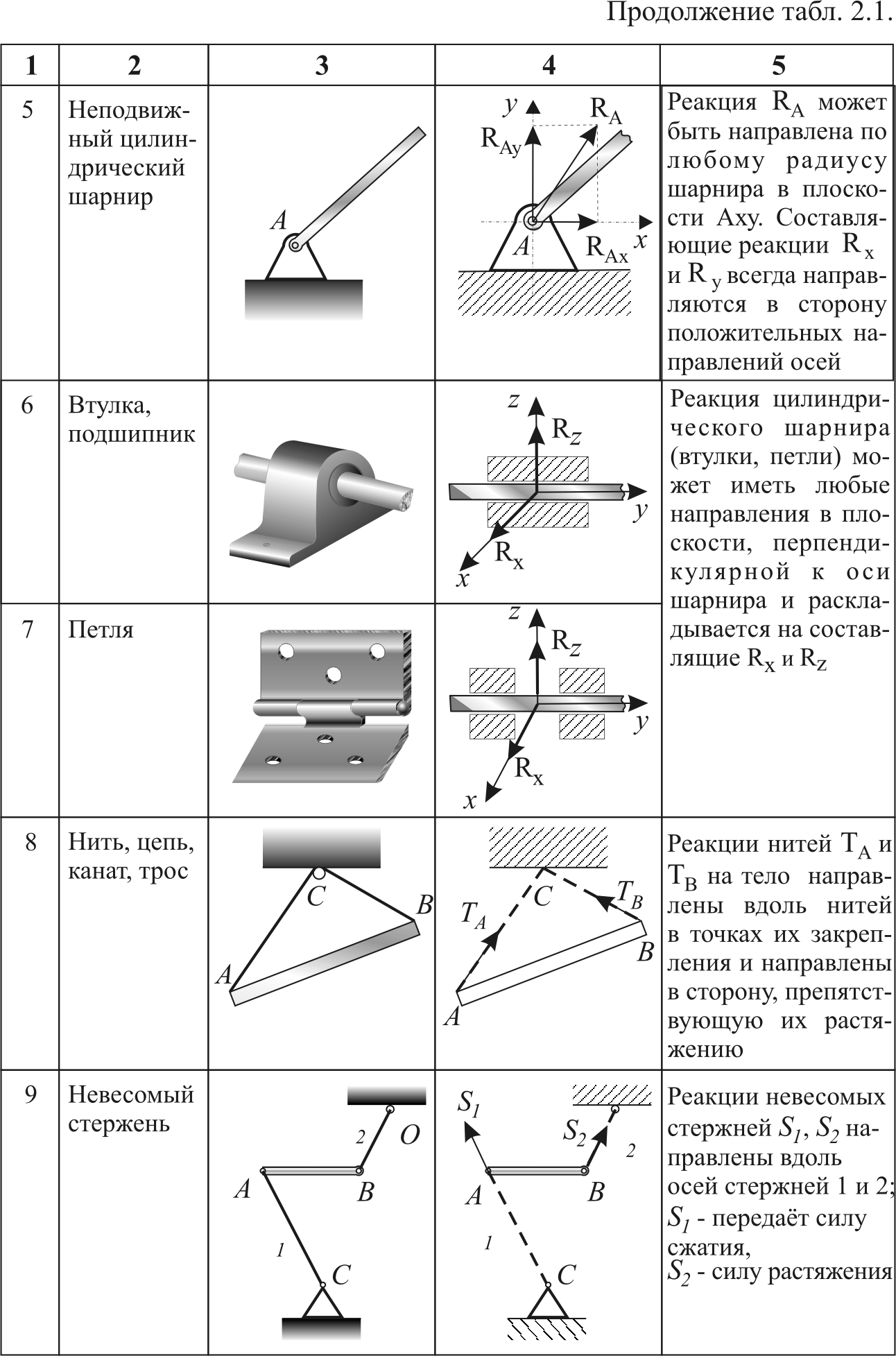
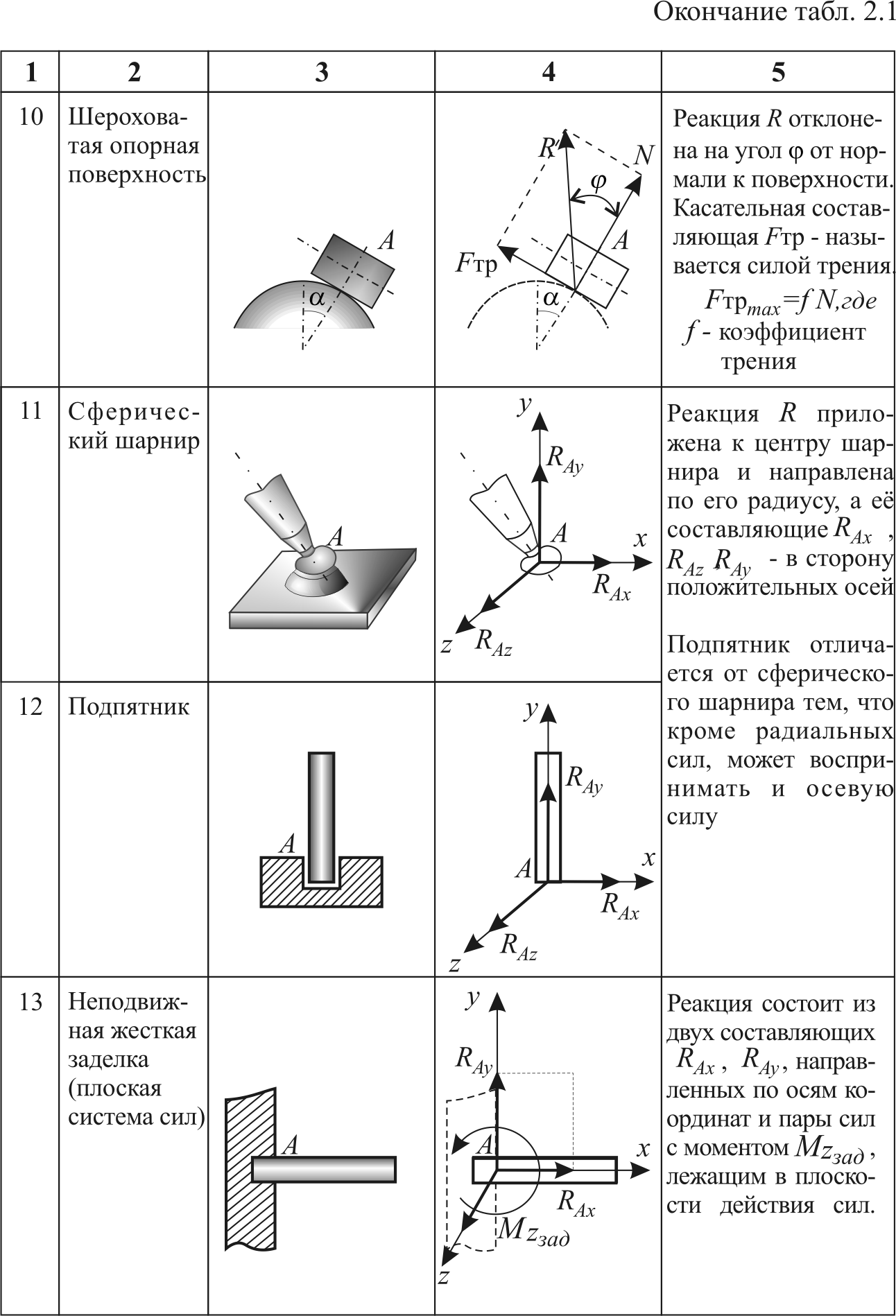
и силы реакций. Некоторые типичные
виды связей и реакции, соответствующие
этим связям, приведены в табл.2.1.
Составляющие реакций
![]() рекомендуется
направлять в сторону положительного
направления осей, а момент пары
рекомендуется
направлять в сторону положительного
направления осей, а момент пары
![]() считать
положительным (вращение против хода
часовой стрелки в правой системе
координат). Если в процессе решения
задачи для
,
считать
положительным (вращение против хода
часовой стрелки в правой системе
координат). Если в процессе решения
задачи для
,![]() получены отрицательные значения, то
это означает, что составляющие и
направление вращения пары в действительности
противоположны предполагаемым, но на
рисунке схемы менять ничего не надо.
получены отрицательные значения, то
это означает, что составляющие и
направление вращения пары в действительности
противоположны предполагаемым, но на
рисунке схемы менять ничего не надо.
Момент силы относительно точки и оси
Важнейшими понятиями в механике являются момент силы относительно точки и относительно оси. Под действием силы тело может поворачиваться вокруг некоторой точки или оси. Для характеристики силового воздействия, приводящего к вращению тела, введено понятие момент силы.
Е сли
рассмотреть подъем груза с помощью
рычага АВ (рис.2.1), то из повседневного
опыта видно, что одна и та же сила
сли
рассмотреть подъем груза с помощью
рычага АВ (рис.2.1), то из повседневного
опыта видно, что одна и та же сила
![]() будет более эффективна (в состоянии
поднять больший груз), если она будет
приложена под прямым углом к рычагу.
Рассмотрим момент силы
будет более эффективна (в состоянии
поднять больший груз), если она будет
приложена под прямым углом к рычагу.
Рассмотрим момент силы![]() ,
приложенной к твердому телу в точке
А, относительно закрепленной точки
О тела, вокруг которой тело может
вращаться (рис. 2.2). Точка О называется
центром момента, а кратчайшее
,
приложенной к твердому телу в точке
А, относительно закрепленной точки
О тела, вокруг которой тело может
вращаться (рис. 2.2). Точка О называется
центром момента, а кратчайшее
Рис. 2.1 расстояние h от центра момента до линии действия силы – плечом силы. Вращение тела зависит в конечном итоге от величины
F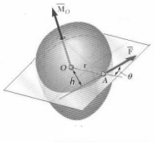 h и ориентации
треугольника ОАF
, и поэтому момент силы удобнее
рассматривать как вектор.
h и ориентации
треугольника ОАF
, и поэтому момент силы удобнее
рассматривать как вектор.
Пусть
![]() -
радиус-вектор, проведенный из точки О
в точку А приложения силы
-
радиус-вектор, проведенный из точки О
в точку А приложения силы
![]() к телу (рис.2.2).
к телу (рис.2.2).
Тогда моментом силы
относительно центра О
называется вектор
![]() 0
(
),
приложенный в центре О перпендикулярно
плоскости, проходящей через векторы
и
в ту сторону, откуда поворот от вектора
к вектору
кажется происходящим против хода часовой
стрелки, и равный
0
(
),
приложенный в центре О перпендикулярно
плоскости, проходящей через векторы
и
в ту сторону, откуда поворот от вектора
к вектору
кажется происходящим против хода часовой
стрелки, и равный
Рис.2.2 0( ) = .
Модуль векторного произведения 0( ) = F r sin = F h, где - угол между векторами и .
