

§ 2. Вынужденные колебания системы с учётом линейно-вязкого трения.
Для малых колебаний системы около устойчивого положения равновесия выражения для кинетической энергии, потенциальной энергии и диссипативной функции имеют вид;

где
![]() -положительные
постоянные. Будем предполагать, что
обобщённая сила
-положительные
постоянные. Будем предполагать, что
обобщённая сила
![]() является заданной функцией времени.
Дифференциальное уравнение вынужденных
колебаний будет линейным, неоднородным
уравнением с постоянными коэффициентами
является заданной функцией времени.
Дифференциальное уравнение вынужденных
колебаний будет линейным, неоднородным
уравнением с постоянными коэффициентами
![]() .
.
При
введённых ранее обозначениях
 оно примет вид
оно примет вид
 (5.18)
(5.18)
Общий
интеграл дифференциального уравнения
(5.18), как известно, является суммой общего
интеграла
соответствующего однородного
уравнения, т. е. уравнения свободных
колебаний, и какого-либо частного решения
уравнения (5.18):
,
причем, в зависимости от значений
коэффициентов n
и k
получим соответствующие решения. В
случае произвольной функции
решение
ищется методом вариации произвольных
постоянных. Здесь же ограничимся случаем,
когда
гармоническая функция
![]() .
Уравнение (3.68) примет вид
.
Уравнение (3.68) примет вид
![]() ,
,
где . Будем искать частное решение в форме
![]() .
.
Тогда

Подстановка в дифференциальное уравнение даёт
Откуда получаем два уравнении для неизвестных А и В:
![]()
Решив эти уравнения, имеем:

Полагая

Получим
![]() ,
где
,
где
 .
(5.16)
.
(5.16)
Общее решение можно теперь записать в таком виде
 .
.
![]() -
решение однородного уравнения в форме
(5.11),(5.12) или (5.13), и, как было выше показано,
оно при
-
решение однородного уравнения в форме
(5.11),(5.12) или (5.13), и, как было выше показано,
оно при
![]() затухает,
остаются только вынужденные колебания.
Поэтому в установившемся режиме
можно
не учитывать.
затухает,
остаются только вынужденные колебания.
Поэтому в установившемся режиме
можно
не учитывать.
§ 3. Динамические характеристики вынужденных колебаний.
Определим
зависимость амплитуды вынужденных
колебаний в функции от частоты вынужденных
колебаний
![]() и фазу
и фазу
![]() .
Для этого введём безразмерные коэффициенты
.
Для этого введём безразмерные коэффициенты
 (коэффициент расстройки),
(коэффициент расстройки),
 (безразмерный коэффициент сопротивления)
и коэффициент динамичности
(безразмерный коэффициент сопротивления)
и коэффициент динамичности
 ,
где
,
где
 (отклонение
системы от положения равновесия под
действием постоянной силы H
. Тогда, вынося
(отклонение
системы от положения равновесия под
действием постоянной силы H
. Тогда, вынося
![]() из под корня в первой формуле (5.16), можно
записать
из под корня в первой формуле (5.16), можно
записать
Рассматривая
μ
как параметр, построим график
![]() .
Сразу видно из приведённой формулы, что
.
Сразу видно из приведённой формулы, что
![]() ,
Обозначим подкоренное выражение в
знаменателе как
,
Обозначим подкоренное выражение в
знаменателе как
![]() ,
вычислим производную
по z
и приравняем её нулю. Максимуму
соответствует минимум функции
,
вычислим производную
по z
и приравняем её нулю. Максимуму
соответствует минимум функции
![]() .
.
Итак,
если
![]() и
и
![]() ,
то функция
имеет экстре
,
то функция
имеет экстре
мум,
причём второе значение имеет место лишь
при
 .
Зави
.
Зави
симость
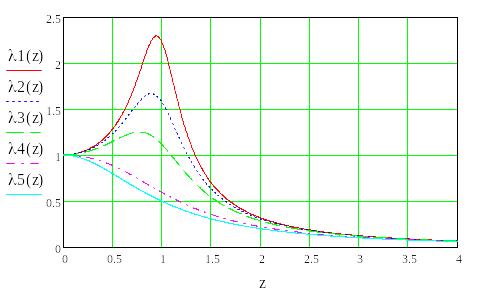 ,
при различных значениях параметра
μ , представлен
на графике рис ; для
,
при различных значениях параметра
μ , представлен
на графике рис ; для
![]() параметр
μ=0.707.
параметр
μ=0.707.
Рис 63
Для
построения графика
![]() преобразуем вторую формулу (5.16) к виду
преобразуем вторую формулу (5.16) к виду
 .
Зависимость
,
при различных значениях параметра μ
, представлен на графике (рис 64).
.
Зависимость
,
при различных значениях параметра μ
, представлен на графике (рис 64).
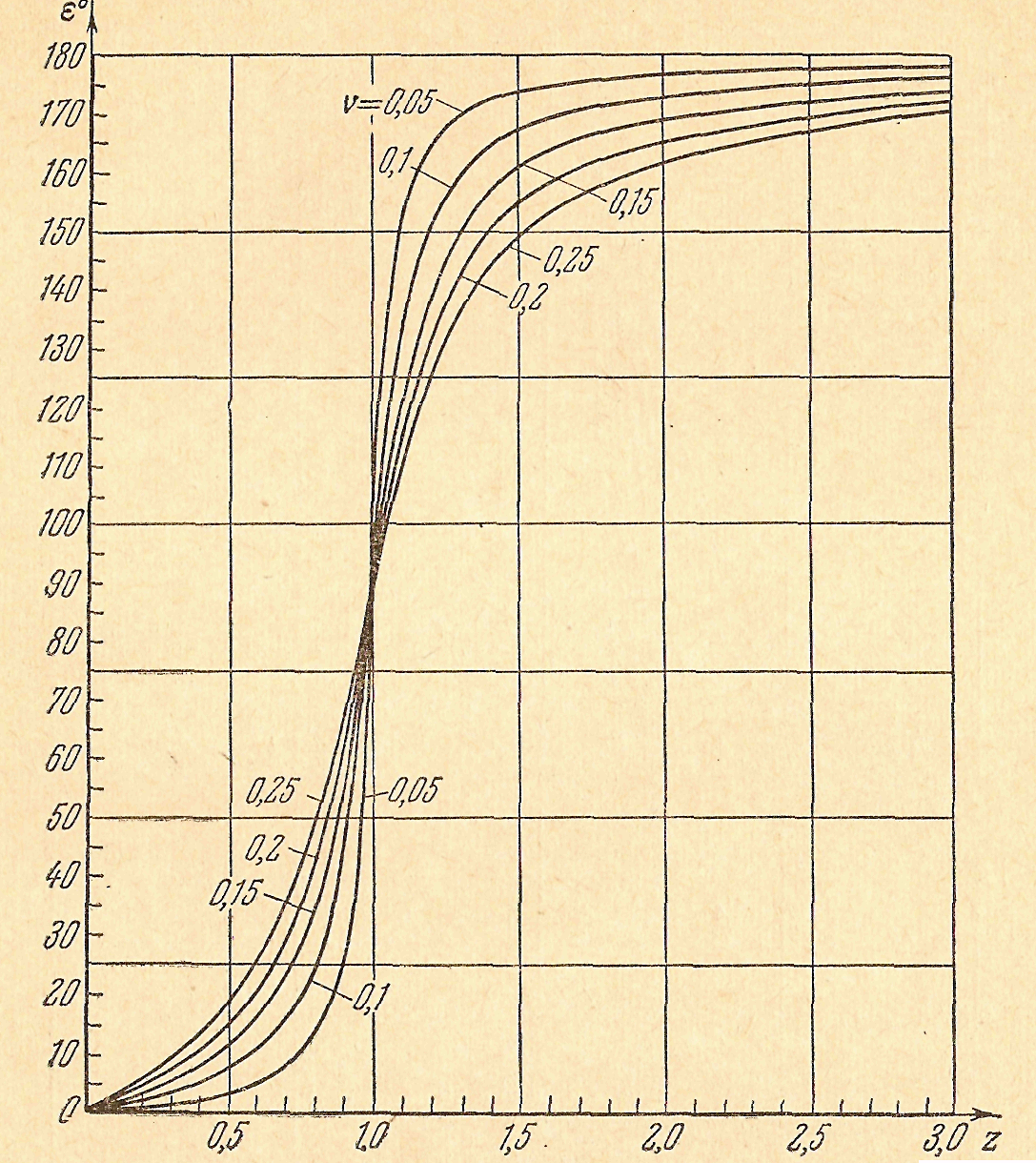
Рис 64
РАЗДЕЛ ШЕСТОЙ
Некоторые задачи статики и динамики точки и твёрдого тела.
__________________________________________________________