

4.6. Моделирование группы технологического оборудования
Часто в технологических системах используют группу оборудования. В терминах СМО – группу приборов, каждый из которых выполняет аналогичное обслуживание, например, параллельно работающие токарные или фрезерные станки на участке механообработки некоторого предприятия. Такие приборы, обладающие одинаковыми свойствами, моделируют многоканальным устройством. Число приборов, которое моделирует многоканальное устройство, определяется пользователем и называется емкостью многоканального устройства.
Так же как для приборов обслуживания для моделирования многоканального устройства используются два блока ENTER и LEAVE.
Блок ENTER (войти) - занятие прибора(ов) из группы (рис.16).
Рис. 16. Блок ENTER
Имитирует включение параллельно работающего оборудования. При входе транзакта в блок ENTER моделируется занятие приборов, число которых указывается в операнде В. Имя группы параллельно работающих приборов указывается в операнде А.
Примеры бока ENTER:
ENTER TOKARN
транзакт занимает один прибор многоканального устройства TOKARN.
ENTER TOOLS,2
транзакт занимает два прибора многоканального устройства TOOLS (оба модуля должны быть свободны).
Блок LEAVE (выйти) - освобождение прибора(ов) из группы (рис. 17).

Рис. 17. Блок LEAVE
Имитирует выключение параллельно работающего оборудования. Значения операндов А и В те же, что и для блока ENTER.
Примеры блока LEAVE:
LEAVE TOKARN
транзакт освобождает один прибор многоканального устройства TOKARN.
LEAVE TOOLS, 2
транзакт освобождает два прибора многоканального устройства TOOLS.
Многоканальные устройства характеризуются емкостью, которую необходимо задавать в начале моделирования. Это делается при помощи оператора STORAGE.
Оператор STORAGE - задает емкость многоканального устройства.
В операнде А указывается имя многоканального устройства, а в операнде В - целое число, определяющее его емкость.
Примеры оператора STORAGE:
STORAGE S(TOKARN),2
задается многоканальное устройство с именем TOKARN и с пропускной способностью равной 2.
STORAGE S(KOMP),3/S(FAX),4
задаются многоканальные устройства KOMP с емкостью - 3 и FAX с емкостью -4.
Пример моделирования
Блоки ENTER и LEAVE позволяют моделировать технологические процессы, отображаемые многоканальными СМО. Занятие канала в течение некоторого времени (обслуживание в СМО), отображается блоком ADVANCE, который помещается между блоками ENTER и LEAVE.
Таблица 2
Модель роботизированного технологического комплекса (вариант 2)
Блок-схема GPSS/H-модели |
GPSS/H-программа |
|
STORAGE S(RTK),3
GENERATE 100,40
ENTER RTK
ADVANCE 80,50
LEAVE RTK
TERMINATE 1
START 100 |
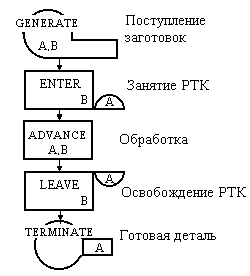
В качестве примера использования блоков ENTER и LEAVE изменим условие рассмотренной выше модели роботизированного технологического комплекса. Предположим, что в РТК одновременно можно обрабатывать три заготовки. Для отображения этого условия используем многоканальное устройство с емкостью 3. По сравнению с моделью, рассмотренной выше, блоки SEIZE и RELEASE заменены на блоки ENTER и LEAVE (табл. 2).