

Опрос 1.
Скорость и ускорение. Виды ускорений.
Положение точки М в пространстве определяется тремя координатами. Эти координаты изменяются при переходе точки в другое положение. Кривая, которую описывает точка при движении в пространстве относительно выбранной системы отсчета, называется ее траекторией.
Траектории делятся на прямолинейные (например, движение точек поршня двигателя) и криволинейные (круговые — движение точек шкива, круглой пилы; параболические — движение жидкости при истечении из отверстия в боковой стенке сосуда и др.).
Движение точки в пространстве прежде всего определяется скоростью, которая характеризует быстроту и направление движения точки в данный момент времени.
!!!Скорость - векторная физическая величина, характеризующая быстроту перемещения и направления движения материальной точки в пространстве относительно выбранной системы отсчёта.
В зависимости от скорости движение точки может быть равномерным и неравномерным. При равномерном движении скорость постоянна по величине, при неравномерном — переменна.
Изменение скорости во времени характеризуется ускорением.
Ускорение - производная скорости по времени, векторная величина, показывающая, на сколько изменяется вектор скорости точки (тела) при её (его) движении за единицу времени (то есть ускорение учитывает не только изменение величины скорости, но и её направления).
Скорость и ускорение точки являются векторными величинами.
Виды ускорений:
Ускорение точки при прямолинейном движении
Если вектор не меняется со временем, движение называют равноускоренным. При равноускоренном движении справедливы формулы:
![]()
![]()
Частным случаем равноускоренного движения является случай, когда ускорение равно нулю в течение всего времени движения. В этом случае скорость постоянна, а движение происходит по прямолинейной траектории (если скорость тоже равна нулю, то тело покоится), поэтому такое движение называют прямолинейным и равномерным.
Ускорение точки при движении по окружности
Вектор ускорения
![]()
при движении точки по окружности можно разложить на два слагаемых (компоненты):
![]()
Тангенциальное ускорение — направлено по касательной к траектории (обозначается иногда и т. д., в зависимости от того, какой буквой в данной книге принято обозначать ускорение). Является составляющей вектора ускорения a. Характеризует изменение скорости по модулю.
![]()
Центростремительное или Нормальное ускорение — возникает (не равно нулю) всегда при движении точки по окружности (конечного радиуса) (также обозначается иногда и т. д.). Является составляющей вектора ускорения a, перпендикулярной вектору мгновенной скорости. Вектор нормального ускорения всегда направлен к центру окружности, а модуль равен:
![]()
Угловое ускорение — показывает, на сколько изменилась угловая скорость за единицу времени, и, по аналогии с линейным ускорением, равно:
![]()
Направление вектора здесь показывает, увеличивается или уменьшается модуль скорости. Если векторы углового ускорения и скорости сонаправлены, значение скорости растёт, и наоборот.
Ускорение точки при движении по кривой
Вектор
ускорения можно разложить по сопутствующему
базису![]()
![]()
Где:
![]() —
величина скорости,
—
величина скорости,
 —
единичный касательный к траектории
вектор, направленный вдоль скорости
(касательный орт),
—
единичный касательный к траектории
вектор, направленный вдоль скорости
(касательный орт),
 —
орт главной нормали к траектории, который
можно определить как единичный вектор
в направлении
—
орт главной нормали к траектории, который
можно определить как единичный вектор
в направлении
![]()
![]() —
орт бинормали к траектории,
—
орт бинормали к траектории,
 —
радиус кривизны траектории
—
радиус кривизны траектории
![]() называемое бинормальным ускорением,
всегда равно нулю. Это можно считать
прямым следствием определения векторов
называемое бинормальным ускорением,
всегда равно нулю. Это можно считать
прямым следствием определения векторов
![]() :можно сказать, что они выбираются именно
так, чтобы первый всегда совпадал с
нормальным ускорением, второй же
ортогонально первому. Векторы
:можно сказать, что они выбираются именно
так, чтобы первый всегда совпадал с
нормальным ускорением, второй же
ортогонально первому. Векторы
![]() и
и
![]() называются касательным (тангенциальным)
и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор
ускорения всегда можно записать как:
называются касательным (тангенциальным)
и нормальным ускорениями соответственно.
Итак, учитывая сказанное выше, вектор
ускорения всегда можно записать как:
![]()
Ускорения в твёрдом теле.
Связь ускорений двух точек можно получить.
Ускорение при сложном движении.
Абсолютное ускорение равно сумме относительного, переносного.
II закон Ньютона. Силы в механике.
III закон Ньютона. При каких условиях сохраняется импульс системы тел? Примеры.
Сила тяжести. Свободное падение. Состояние невесомости и его влияние на организм.
Сила тяжести. Притяжение существует не только между Землей и телами, находящимися на ней. Притягиваются между собой Луна и Земля. Притяжение Земли к Луне вызывает приливы и отливы воды. Огромные массы воды поднимаются в океанах и морях дважды в сутки на много метров.
Притяжение всех тел Вселенной друг к другу называется всемирным тяготением.
Английский ученый Исаак Ньютон первым доказал и установил закон всемирного тяготения.
Согласно этому закону, силы притяжения между телами тем больше, чем больше массы этих тел. Силы притяжения между телами уменьшаются, если увеличивается расстояние между ними.
Для всех живущих на Земле особенно важное значение имеет сила притяжения тел к Земле.
Сила, с которой Земля притягивает к себе тело, называется силой тяжести.
Сила тяжести обозначается буквой F с индексом: Fтяж. Она всегда направлена вертикально вниз.
Сила тяжести прямо пропорциональна массе этого тела.
Свободное падение - равноускоренное движение, под действием силы тяжести. Свободное падение возможно на поверхность любого тела, обладающего достаточной массой (планеты и их спутники, звезды, и т. п.). На объекте, находящемся в состоянии свободного падения, все физические процессы протекают так же, как и в состоянии невесомости. Это используется, например, при тренировке космонавтов: самолёт с космонавтами набирает большую высоту и пикирует, в течение нескольких минут находясь в состоянии свободного падения, при этом космонавты и экипаж испытывают состояние невесомости.
Невесо́мость — состояние, при котором сила взаимодействия тела с опорой (вес тела), возникающая в связи с гравитационным притяжением, действием других массовых сил, в частности силы инерции, возникающей при ускоренном движении тела, отсутствует. Иногда можно слышать другое название этого эффекта — микрогравитация. Это название неверно для околоземного полета. Гравитация (сила притяжения) остаётся прежней. Но при полете на больших расстояниях от небесных тел, когда их гравитационное влияние пренебрежимо мало, действительно возникает микрогравитация.
Воздействие на организм:
1) У большинства космонавтов наблюдается реакция организма, называемая синдромом космической адаптации - по симптомам состояние похоже на морскую болезнь: снижение аппетита, головокружение, головная боль, усиление слюноотделения, тошнота, иногда встречается рвота, пространственные иллюзии. Все эти эффекты обычно проходят после 3-6 суток полёта.
2) При длительном (несколько недель и более) пребывании человека в космосе отсутствие гравитации начинает вызывать в организме определённые изменения, носящие негативный характер.
Первое и самое очевидное последствие невесомости — стремительное атрофирование мышц: мускулатура фактически выключается из деятельности человека, в результате падают все физические характеристики организма. Кроме того, следствием резкого уменьшения активности мышечных тканей является сокращение потребления организмом кислорода, и из-за возникающего избытка гемоглобина может понизиться деятельность костного мозга, синтезирующего его (гемоглобин).
3) Также есть основания полагать, что ограничение подвижности нарушит фосфорный обмен в костях, что приведёт к снижению их прочности.
5. Закон Гука и упругие силы (натяжение нитей и реакции опор). Применение вытяжек при
лечении переломов.
Зако́н Гу́ка — уравнение теории упругости, связывающее напряжение и деформацию упругой среды. Открыт в 1660 году английским учёным Робертом Гуком (Хуком) (англ. Robert Hooke). Поскольку закон Гука записывается для малых напряжений и деформаций, он имеет вид простой пропорциональности.
!!!Сила упругости, возникающая в теле при его деформации, прямо пропорциональна величине этой деформации!!!
![]()
![]() — сила, которой растягивают (сжимают)
стержень,
— сила, которой растягивают (сжимают)
стержень,
![]() —
абсолютное удлинение (сжатие) стержня,
а
—
абсолютное удлинение (сжатие) стержня,
а
![]() называется
коэффициентом упругости (или жёсткости).
называется
коэффициентом упругости (или жёсткости).
Коэффициент
упругости зависит как от свойств
материала, так и от размеров стержня.
Можно выделить зависимость от размеров
стержня (площади поперечного сечения
![]() и длины ) явно, записав коэффициент
упругости как
и длины ) явно, записав коэффициент
упругости как
![]()
Величина
![]() называется Модулем упругости первого
рода или модулем Юнга и является
механической характеристикой материала.
называется Модулем упругости первого
рода или модулем Юнга и является
механической характеристикой материала.
Если ввести
относительное удлинение
![]() и нормальное напряжение в поперечном
сечении
и нормальное напряжение в поперечном
сечении
![]()
то закон Гука
в относительных единицах запишется как
![]()
В такой форме он справедлив для любых малых объёмов вещества.
6. Сила трения и коэффициент трения. Трение покоя и трение скольжения.
Сила трения - при соприкосновении движущихся (или приходящих в движение) тел с другими телами, а также с частицами вещества окружающей среды возникают силы, препятствующие такому движению. Действие сил трения всегда сопровождается превращением механической энергии во внутреннюю и вызывает нагревание тел и окружающей их среды.
Существует внешнее и внутреннее трение (иначе называемое вязкостью).
Внешним называют такой вид трения, при котором в местах соприкосновения твердых тел возникают силы, затрудняющие взаимное перемещение тел и направленные по касательной к их поверхностям.
Внутренним трением (вязкостью) называется вид трения, состоящий в том, что при взаимном перемещении. слоев жидкости или газа между ними возникают касательные силы, препятствующие такому перемещению.
Внешнее трение подразделяют на:
А) трение покоя (статическое трение) - возникает между неподвижными твердыми телами, когда какое-либо из них пытаются сдвинуть с места.
Наблюдения показывают, что сила трения покоя всегда направлена противоположно действующей на тело внешней силе, стремящейся привести это тело в движение. До определенного момента сила трения покоя увеличивается с возрастанием внешней силы, уравновешивая последнюю. Максимальное значение силы трения покоя пропорционально модулю силы Fд давления, производимого телом на опору.
По третьему закону Ньютона сила Fд давления тела на опору равна по модулю силе N реакции опоры. Поэтому максимальная сила трения покоя пропорциональна силе реакции опоры. Для модулей этих сил справедливо следующее соотношение: Fп=fпN, где fп - безразмерный коэффициент пропорциональности, называемый коэффициентом трения покоя. Значение этого коэффициента зависит от материала и состояния трущихся поверхностей.
О пределить
значение коэффициента трения покоя
можно следующим образом. Пусть тело
(плоский брусок) лежит на наклонной
плоскости АВ. На него действуют три
силы: сила тяжести F, сила трения
покоя Fп и сила реакции опоры N.
Нормальная составляющая Fп силы
тяжести представляет собой силу давления
Fд, производимого телом на опору,
пределить
значение коэффициента трения покоя
можно следующим образом. Пусть тело
(плоский брусок) лежит на наклонной
плоскости АВ. На него действуют три
силы: сила тяжести F, сила трения
покоя Fп и сила реакции опоры N.
Нормальная составляющая Fп силы
тяжести представляет собой силу давления
Fд, производимого телом на опору,
т. е. FН=Fд. Тангенциальная составляющая Fт силы тяжести представляет собой силу, стремящуюся сдвинуть тело вниз по наклонной плоскости.
При малых углах наклона a сила Fт уравновешивается силой трения покоя Fп и тело на наклонной плоскости покоится (сила N реакции опоры по третьему закону Ньютона равна по модулю и противоположна по направлению силе Fд, т. е. уравновешивает ее).
Будем увеличивать угол наклона a до тех пор, пока тело не начнет скользить вниз по наклонной плоскости. В этот момент Fт=Fпmax
fп=Fт/Fн. Подставив эти значения Fт И Fн в формулу fн=sina/cosa=tga. Измерив угол a, при котором начинается скольжение тела, можно по формуле (2.25) вычислить значение коэффициента трения покоя fп.
Б) кинематическое трение - существует между взаимно соприкасающимися движущимися твердыми телами.
Оно, в свою очередь, подразделяется на:
А) трение скольжения Fc= fcN, где Fc - модуль силы трения скольжения; fc - безразмерный коэффициент трения скольжения; N - модуль силы реакции опоры. Значение fc зависит от того, из каких веществ изготовлены трущиеся поверхности и от качества их обработки. Если сделать поверхности более гладкими, значение fc уменьшится. Однако уменьшать шероховатость поверхностей можно лишь до определенного предела, так как при очень гладких (например, полированных) поверхностях значение fc вновь увеличивается. Происходит это потому, что молекулы тел с гладкими поверхностями близко подходят друг к другу и силы молекулярного притяжения между ними вызывают "прилипание" тел, препятствующее их скольжению.
Б )
трение качения.
)
трение качения.
Причина появления трения качения: под действием силы тяжести круглое твердое тело (например, шар или колесо), находящееся на плоской поверхности, деформируется, вследствие чего оно опирается не на одну точку, а на площадку больших или меньших размеров. Это приводит к тому, что, когда тело начинает катиться, точка А приложения реакции опоры смещается немного вперед от вертикали, проходящей через центр тяжести тела, а линия действия силы реакции опоры R отклоняется немного назад от этой вертикали (рис. 24). При этом нормальная составляющая Rн = N реакции опоры компенсирует силу тяжести F (т.е. Rн =-F), а не скомпенсированная тангенциальная составляющая Rт реакции опоры направлена против движения тела и играет роль силы трения качения Fк.
Модуль силы трения качения Fк определяют по закону Fк = Kк·N/r (2.25)
где Kк - безразмерный коэффициент трения качения; N=Rн - модуль нормальной составляющей силы реакции опоры; r - радиус катящегося тела.
Если мы сравним между собой коэффициенты всех видов внешнего трения для каких-либо двух материалов, из которых изготовлены соприкасающиеся тела, то увидим, что fп>fc>Kk, т. е. при прочих равных условиях наибольшим является трение покоя, а наименьшим - трение качения.
В жизни человека силы трения играют важную роль. В одних случаях он их использует, а в других борется с ними. Силы трения имеют электромагнитную природу.
7. Пружины, их параллельное и последовательное соединение. Миофибрилла.
Пружина — упругий элемент, предназначенный для накапливания и поглощения механической энергии. Пружина может быть изготовлена из любого материала, имеющего достаточно высокие прочностные и упругие свойства (сталь, пластмасса, дерево, фанера, даже картон).
Миофибри́ллы — органеллы клеток поперечнополосатых мышц, обеспечивающие их сокращение. Служат для сокращений мышечных волокон. Миофибрилла — нитевидная структура, состоящая из саркомеров. Каждый саркомер имеет длину около 2 мкм и содержит два типа белковых филаментов: тонкие миофиламенты из актина и толстые филаменты из миозина. Границы между филаментами (Z-диски) состоят из особых белков, к которым крепятся ±концы актиновых филаментов. Миозиновые филаменты также крепятся к границам саркомера с помощью нитей из белка титина (тайтина). С актиновыми филаментами связаны вспомогательные белки — небулин и белки тропонин-тропомиозинового комплекса.
У человека толщина миофибрилл составляет 1-2 мкм, а их длина может достигать длины всей клетки (до нескольких сантиметров). Одна клетка содержит обычно несколько десятков миофибрилл, на их долю приходится до 2/3 сухой массы мышечных клеток.
8. Когда можно говорить о силах инерции? Центрифугирование. Вестибулярный аппарат
человека (отолиты, полукружные каналы).
Сила инерции (также инерционная сила) — термин, широко применяемый в различных значениях в точных науках, а также, как метафора, в философии, истории, публицистике и художественной литературе.
В точных науках сила инерции обычно представляет собой понятие, привлекаемое в целях удобства при рассмотрении движения материальных тел в неинерциальной системе отсчёта. Частными случаями такой силы инерции являются центробежная сила и сила Кориолиса. Кроме того, силу инерции применяют для формальной возможности записывать уравнения динамики как более простые уравнения статики.
Сила инерции - векторная величина, численно равная произведению массы m материальной точки на модуль ее ускорения ? и направленная противоположно ускорению.
Центрифугирование — разделение неоднородных систем (напр., жидкость — твердые частицы) на фракции по плотности при помощи центробежных сил. Центрифугирование осуществляется в аппаратах, называемых центрифугами. Центрифугирование применяется для:
- отделения осадка от раствора,
- отделения загрязненных жидкостей,
- производится также центрифугирование эмульсий (напр., сепарирование молока).
Для исследования высокомолекулярных веществ, биологических систем применяют ультрацентрифуги. Центрифугирование используют в химической, атомной, пищевой, нефтяной промышленностях.
Центробежное отстаивание применяется для выделения осветлённой жидкой фазы из разбавленных суспензий и для осаждения твёрдой фазы из концентрированных суспензий. Центробежное фильтрование используется чаще всего для выделения твёрдой фазы из суспензий и шламов с относительно малым содержанием жидкой фазы.
Вестибуля́рный аппара́т (лат. vestibulum — преддверие) - орган, воспринимающий изменения положения головы и тела в пространстве и направление движения тела у позвоночных животных и человека; часть внутреннего уха.
Вестибулярный аппарат — сложный рецептор вестибулярного анализатора. Структурная основа вестибулярного аппарата — комплекс скоплений реснитчатых клеток внутреннего уха, эндолимфы, включенных в неё известковых образований — отолитов и желеобразных купул в ампулах полукружных каналов. Из рецепторов равновесия поступают сигналы двух типов: статические (связанные с положением тела) и динамические (связанные с ускорением). И те и другие сигналы возникают при механическом раздражении чувствительных волосков смещением либо отолитов (или купул), либо эндолимфы. Обычно отолит имеет большую плотность, чем окружающая его эндолимфа, и поддерживается чувствительными волосками.
При изменении положения тела изменяется направление силы, действующей со стороны отолита на чувствительные волоски. Исследования на рыбах показали, что эффективной раздражающей силой, действующей на чувствительный эпителий, служит составляющая, направленная параллельно поверхности эпителия (так называемое срезывающее усилие). Вероятно, такова причина раздражения волосковых клеток и у других позвоночных. Раздражающим воздействием для полукружных каналов служит ускорение движения всего тела или головы, действующее в плоскости каждого канала.
Вследствие разной инерции эндолимфы и купулы при ускорении происходит смещение купулы, а сопротивление трения в тонких каналах служит демпфером (глушителем) всей системы. Овальный мешочек (утрикулюс) играет ведущую роль в восприятии положения тела и, вероятно, участвует в ощущении вращения. Круглый мешочек (саккулюс) дополняет овальный и, по-видимому, необходим для восприятия вибраций.
9. Центр инерции системы. Баллистокардиография.
В любой
системе частиц имеется одна замечательная
точка С - центр инерции, или центр
масс, - которая обладает рядом
интересных и важных свойств. Центр масс
является точкой приложения вектора
импульса системы, так как вектор любого
импульса является полярным вектором.
Положение точки С относительно
начала О данной системы отсчета
характеризуется радиусом-вектором,
определяемым следующей формулой:
![]()
где
![]() - масса и радиус-вектор каждой частицы
системы M - масса всей системы
- масса и радиус-вектор каждой частицы
системы M - масса всей системы
Баллистокардиография (греч. ballō бросать + kardia сердце + graphō писать, изображать) — метод графической регистрации реактивных механических движений тела человека, обусловленных сокращениями сердца и перемещением крови в крупных артериях.
На регистрируемой кривой — баллистокардиограмме (БКГ) отражаются колебания тела, возникающие под влиянием систолы сердца, гидравлического удара крови о дугу аорты и бифуркацию легочного ствола, а затем о бифуркацию аорты. Амплитуда волн БКГ в систолической фазе пропорциональна энергии сердечного выброса. На БКГ отражается также степень замедления кровотока, зависимая от величины периферического сопротивления кровотоку. В зависимости от регистрируемого параметра колебаний (обычно по продольной оси тела) различают Б. смещения, скорости и ускорения (последняя называется также акцелерационной Б.). Предложено два основных варианта регистрации БКГ: прямой метод, при котором записываются колебания тела обследуемого, лежащего на неподвижном основании, и непрямой метод, основанный на записи колебаний подвижного основания, на котором лежит обследуемый. Запись осуществляют с помощью специальных приборов — баллистокардиографов. К разновидностям Б. можно отнести ряд методов регистрации связанных с сердечной деятельностью механических колебаний грудной клетки (локальная Б.) — динамокардиографию (регистрацию перемещений центра тяжести грудной клетки), сейсмографию (регистрацию сотрясений грудной стенки) и низкочастотную сейсмографию, позволяющую регистрировать колебания грудной стенки частотой от 1 до 10 Гц (кинетокардиография).
Баллистокардиография является неспецифическим методом исследования сократимости миокарда и гемодинамики. По изменениям амплитуды и деформации систолических волн различают четыре степени патологических изменений БКГ, которые могут соответствовать выраженности нарушений сократимости миокарда. Однако форма БКГ зависит и от других факторов (эластичности крупных артерий, наличия препятствий на пути кровотока — пороков сердца, стенозов аорты и магистральных артерий, артериовенозных шунтов, вязкости крови, отношения массы миокарда к массе тела и т.д.). Поэтому выраженные сдвиги БКГ, соответствующие III—IV степени изменений, могут быть выявлены и при достаточном сердечном выбросе и нормальной сократимости миокарда, например у больных с мерцательной тахиаритмией (из-за интерференции волн, относящихся к различным сердечным циклам).
В силу неспецифичности результатов Б. она не может применяться с диагностическими целями; сократимость миокарда в современной клинике изучают более информативными методами, в частности ультразвуковыми.
10. Работа, энергия, мощность. При каких условиях сохраняется энергия системы? Примеры.
Применяемые в технике машины предназначены для выполнения определенной полезной работы: на металлорежущих станках изготавливают детали, в компрессорах получают сжатый воздух, при помощи транспортных машин перемещают грузы и т. д. Во всех машинах движущие силы преодолевают различные сопротивления, выполняют механическую работу. Т.о., под механической работой понимают преодоление сопротивлений при движении.
Работу считают положительной, если вектор силы совпадает с направлением движения, и отрицательной при векторе силы, направленном в противоположную движению сторону. Примером отрицательной работы может быть действие тормозящей силы.
Одну и ту же работу можно выполнить за различное время. Быстрота выполнения работы характеризует работоспособность машин и называется мощностью.
За единицу мощности принимается работа, выполненная за 1 с времени. Численная величина мощности определяется отношением работы ко времени, в течение которого выполнена эта работа N=A/t
где: А — работа; t — время.
Для решения задач установлены следующие единицы измерения работы и мощности. В Международной системе за единицу работы принят модуль (Дж) — работа, которая выполняется силой 1Яна пути 1 м. В технической системе единиц работа измеряется в кгс • м:
1 кгс • м = 9,81 Дж;
Дж = 0,102 кгс • м.
За единицу мощности в Международной системе принят ватт (Вт) — мощность, при которой работа в 1 Дж выполняется за 1 с времени. Мощность, равная 1000 Вт, называется киловаттом (кВт). В технической системе мощность выражается в кгс • м/с и лошадиных силах (л.с.). Мощность 1 кгс • м — это такая мощность, когда работа в 1 кгс • м выполняется за 1 с времени:
1 кгс • м/с = 9,81 Вт; 1 л.с. = 75 кгс • м/с = 75 • 9,81 = 736 Вт; 1 кВт = 102 кгс • м/с = 102 • 9,81 = 1000 Вт.
С работой и мощностью связано понятие о механической энергии.
Механическая энергия — это особая физическая величина, характеризующая способность тел совершать работу. Отсюда следует, что работа и энергия — эквивалентные величины: затрачивая энергию, выполняют соответствующую работу; совершая работу, тело приобретает определенную скорость и получает запас энергии. Т.о., работа есть энергия в движении, а энергия — запас работоспособности тела. Эквивалентность работы и энергии дает основание измерять эти величины в одинаковых единицах, то есть в джоулях и килограммометрах.
Различают два вида механической энергии: кинетическую и потенциальную.
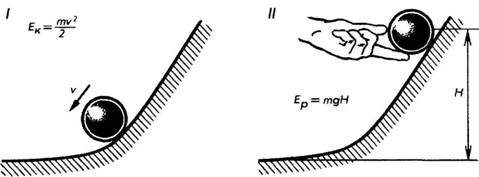
Кинетической энергией называют энергию движущихся тел. Примером могут служить движущиеся части машин и др. Численная величина кинетической энергии может быть определена затратой работы на приращение скорости движения. В результате приращения скорости тело получает кинетическую энергию, равную полупроизведению массы тела на квадрат скорости движения.
Потенциальной энергией (от слова потенциал, что значит запас) называют энергию поднятого тела, определяемого его положением над поверхностью Земли.
Потенциальная энергия поднятого тела определяется произведением его веса на высоту над поверхностью Земли. Потенциальной энергией обладают также упругие тела — сжатые газы, растянутые и закрученные пружины и др. Энергия упругих тел определяется величиной работы, которая затрачивается на преодоление сопротивления упругости тел при переводе их в напряженное состояние.
Закон сохранения энергии. Между потенциальной и кинетической энергией существует тесная связь. Поднимая груз, затрачивают кинетическую энергию, но в результате подъема груз получает потенциальную энергию. При падении груз расходует потенциальную энергию, но увеличивая скорость, приобретает кинетическую энергию.
Уменьшение потенциальной энергии при падении груза и соответствующее увеличение кинетической энергии есть переход механической энергии из одного вида в другой.
На основании многочисленных наблюдений и опытов великий русский ученый М.В. Ломоносов установил закон сохранения энергии:
-при всяких превращениях энергии из одного вида в другой количество энергии не изменяется;
-сколько было затрачено одного вида энергии, столько же энергии других видов получается;
-энергия не исчезает, а переходит из одного вида в другой в равных количествах.
11. Чему равна кинетическая энергия тела? В каких единицах она измеряется, и как можно ее
изменить? Привести примеры.
Кинетическая энергия - энергия механической системы, зависящая от скоростей движения её точек К. э. Т материальной точки измеряется половиной произведения массы m этой точки на квадрат её скорости u, т. е. Т = 1/2 mu2.
Изменение
К. э. системы при её перемещении из
положения (конфигурации) 1 в положение
2 происходит под действием приложенных
к системе внешних и внутренних сил и
равно сумме работ
![]() и
и
![]() этих сил на данном перемещении:
этих сил на данном перемещении:
![]() . Это равенство выражает теорему об
изменении К. э., с помощью которой решаются
многие задачи динамики.
. Это равенство выражает теорему об
изменении К. э., с помощью которой решаются
многие задачи динамики.
при отсутствии превращения механической энергии в тепловую и наоборот. это когда взаимодействие между телами в системе абсолютно упругое.
При каких условиях выполняется закон сохранения механической энергии?
В качестве примеров: маятник (физический и математический), абсолютно упругий удар, вращение планет вокруг сонлца и т.п.
12. Гравитационная и упругая потенциальная энергия. В каких единицах она измеряется, и
как можно ее изменить? Привести примеры.
Потенциальная энергия — скалярная физическая величина, характеризующая способность некого тела (или материальной точки) совершать работу за счет своего нахождения в поле действия сил. Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной конфигурации называется нормировкой потенциальной энергии.
Потенциальная энергия упруго деформированного тела:
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
![]() .
.
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М, находящихся на расстоянии r одна от другой, равна
![]() .
(11)
.
(11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Еp = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, Me – масса Земли, Re – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
![]()
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « Re) равна
![]() ,
,
где ![]() –
модуль ускорения свободного падения
вблизи поверхности Земли.
–
модуль ускорения свободного падения
вблизи поверхности Земли.
13. Чему равен импульс тела, и как можно его изменить?
Векторную величину Ft, равную произведению силы на время ее действия, называют импульсом силы. Векторную величину р=mv, равную произведению массы тела на его скорость, называют импульсом тела.
В СИ за единицу импульса принят импульс тела массой 1 кг, движущегося со скоростью 1 м/с, т.е. единицей импульса является килограмм/метр в секунду (1 кг·м/с).
Изменение импульса тела Dp за время t равно импульсу силы Ft, действующей на тело в течение этого времени.
Группу тел, взаимодействующих не только между собой, но и с телами, не входящими в состав этой группы, называют незамкнутой системой. Силы, с которыми на тела данной системы действуют тела, не входящие в эту систему, называют внешними (обычно внешние силы обозначают буквой F).
Рассмотрим взаимодействие двух тел в незамкнутой системе. Изменение импульсов данных тел происходит как под действием внутренних сил, так и под действием внешних сил.
Согласно второму закону Ньютона, изменения импульсов рассматриваемых тел у первого и второго тел составляют
Dр1=f1t+F1t (3.5)
Dр2=f2t+F2t (3.6)
где t - время действия внешних и внутренних сил. Почленно сложив выражения (3.5) и (3.6), найдем, что
D(p1+p2)=(f1+f2)t +(F1+F2)t
В этой формуле р=р1+р2 - полный импульс системы, f1+f2=0 (так как по третьему закону Ньютона (f1=-f2), F1+F2=F - равнодействующая всех внешних сил, действующих на тела данной системы. С учетом сказанного формула принимает вид Dр=Ft.
14. Момент инерции и энергия вращения тела. Движение конечностей тела человека.
Моменты инерции симметричных тел.
Момент инерции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения СИ: кг·м².
Обозначение: I или J.
Кинетическая энергия тела, движущегося произвольным образом, равна сумме кинетических энергий всех n материальных точек па которые это тело можно разбить:
![]()
Если тело
вращается вокруг неподвижной оси с
угловой скоростью ![]() , то
линейная скорость i-ой точки равна
, то
линейная скорость i-ой точки равна ![]() ,
где
,
где ![]() ,
- расстояние от этой точки до оси вращения.
Следовательно.
,
- расстояние от этой точки до оси вращения.
Следовательно.
|
(5.11) |
где ![]() -
момент инерции тела относительно оси
вращения.
-
момент инерции тела относительно оси
вращения.
В общем случае
движение твердого тела можно представить
в виде суммы двух движений - поступательного
со скоростью, равной скорости ![]() центра
инерции тела, и вращения с угловой
скоростью
вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду
центра
инерции тела, и вращения с угловой
скоростью
вокруг
мгновенной оси, проходящей через центр
инерции. При этом выражение для
кинетической энергии тела преобразуется
к виду
|
(5.12) |
где ![]() -
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
-
момент инерции тела относительно
мгновенной оси вращения, проходящей
через центр инерции.
Кинетическая энергия вращательного движения — энергия тела, связанная с его вращением.
Основные
кинематические характеристики
вращательного движения тела —
его угловая
скорость (![]() )
и угловое
ускорение. Основные
динамические характеристики вращательного
движения — момент
импульса относительно оси
вращения z:
)
и угловое
ускорение. Основные
динамические характеристики вращательного
движения — момент
импульса относительно оси
вращения z:
![]()
и кинетическая энергия
![]()
где Iz — момент инерции тела относительно оси вращения.
Похожий пример можно найти при рассмотрении вращающейся молекулы с главными осями инерции I1, I2 и I3. Вращательная энергия такой молекулы задана выражением
![]()
где ω1, ω2, и ω3 — главные компоненты угловой скорости.
В общем
случае, энергия при вращении с угловой
скоростью ![]() находится
по формуле:
находится
по формуле:
![]() ,
где
,
где ![]() — тензор
инерции.
— тензор
инерции.
Биомеханика человека
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причем обязательно в тесной взаимосвязи.
Элементы статики и динамики тела человека Вертикальное положение тела человека в пространстве, перемещение его по поверхности, различные виды движений (ходьба, бег, прыжки) сложились в процессе длительной эволюции вместе со становлением человека как вида. В процессе антропогенеза, в связи с переходом предков человека к наземным условиям существования, а затем и к перемещению на двух нижних конечностях (задних) весь организм, отдельные его части, органы, включая и опорно-двигательный аппарат, претерпели чрезвычайно сложные изменения. Прямохождение - первооснова главных приспособительных изменений антропогенеза - освободило верхнюю конечность от опорно-двигательной функции. Верхняя конечность превратилась в орган труда - руку, она могла совершенствоваться в дальнейшем в ловкости движений. Рука, таким образом, является не только органом труда, она также и продукт его. Эти изменения как результат качественно новой функции отразились на строении всех составных частей пояса и свободной части верхней конечности. Плечевой пояс служит не только опорой свободной верхней конечности. Он также значительно увеличивает ее подвижность. Благодаря тому, что лопатка соединяется со скелетом туловища главным образом при помощи мышц, она приобретает большую свободу движений. Лопатка участвует во всех движениях, которые совершает ключица. Кроме того, лопатка может свободно перемещаться независимо от ключицы. В многоосном шаровидном плечевом суставе, который почти со всех сторон окружен мышцами, анатомические особенности строения позволяют производить движения по большим дугам во всех плоскостях. Особенно заметно отразилась специализация функции на строении кисти. Благодаря развитию длинных, очень подвижных пальцев, в первую очередь большого пальца, который противопоставляется остальным, кисть превратилась в сложный орган, выполняющий тонкие, дифференцированные действия. Нижняя конечность, приняв на себя всю тяжесть тела, приспособилась исключительно к опорно-двигательной деятельности. Вертикальное положение тела в пространстве, Прямохождение отразились на строении и функциях и пояса (таза), и свободной части нижней конечности. Пояс нижней конечности (тазовый пояс) как прочная арочная конструкция, приспособился к передаче тяжести туловища, головы, верхних конечностей на головки бедренных костей. Установившийся в процессе антропогенеза наклон таза в 45-65° способствует перенесению на свободные нижние конечности тяжести тела в наиболее благоприятных для вертикального положения тела биомеханических условиях. Стопа приобрела сводчатое строение, что увеличило ее прочность противостоять тяжести тела и выполнять роль гибкого рычага в перемещении тела. Сильно развилась мускулатура нижней конечности, которая приспособилась к выполнению статических и динамических нагрузок. По сравнению с верхней конечностью мышцы нижней конечности имеют большую массу, в них значительно больше плотной соединительной ткани. Важным механическим моментом является то, что на нижней конечности мышцы имеют обширные поверхности опоры и приложения силы, прикрепляются сравнительно далеко от точки опоры рычага, на который действуют, но ближе к точке сопротивления. Неодинаковы также отношения групп мышц друг к другу на верхней и нижней конечностях: масса разгибателей нижней конечности относится к массе сгибателей как 3:1, а на верхней конечности это отношение выражается как 1:1,042. На нижней конечности больше развиты разгибатели, чем сгибатели. Это связано с тем, что разгибатели играют большую роль в удержании тела в вертикальном положении и при передвижении в пространстве (ходьба, бег). На руке сгибатели плеча, предплечья и кисти сосредоточены на передней стороне, поскольку работа, производимая руками, совершается впереди туловища. Хватательные движения производятся кистью также с участием сгибателей. Сравнение поворачивающих мышц (пронаторы, супинаторы) верхней и нижней конечностей, их отношение к остальным мышцам данной конечности также свидетельствуют о том, что на верхней конечности они развиты намного больше, чем на нижней. Масса пронаторов и супинаторов руки относится к остальным мышцам верхней конечности как 1:4,8. На нижней конечности отношение массы поворачивающих мышц к остальным 1:29,3. Фасции, апоневрозы на нижней конечности в связи с большим проявлением силы при статических и динамических нагрузках развиты значительно больше, чем на верхней конечности. На нижней конечности имеются дополнительные механизмы, которые способствуют удержанию тела в вертикальном положении и обеспечивают передвижение его в пространстве. Наряду с тем что пояс нижней конечности почти неподвижно соединен с крестцом и представляет естественную опору туловища, тенденции таза опрокинуться кзади на головках бедренных костей препятствует сильно развитая подвздошно-бедренная связка тазобедренного сустава. В разогнутом коленном суставе в поперечном направлении образуется ломаная линия вследствие изменения формы латерального и медиального менисков. На уровне голеностопного сустава при стоянии увеличивается площадь соприкосновения между суставными поверхностями костей голени и таранной кости, так как медиальная и латеральная лодыжки охватывают передний, более широкий отдел блока таранной кости. Фронтальные оси голеностопных суставов устанавливаются друг к другу под углом, открытым кзади. Вместе с тем вертикаль тяжести тела обходит голеностопный сустав спереди, приводя как бы к ущемлению переднего, более широкого отрезка блока таранной кости между медиальной и латеральной лодыжками. Суставы верхней конечности (плечевой, локтевой, лучезапястный) таких тормозных механизмов не имеют. Глубоким изменениям в процессе антропогенеза подверглись кости, мышцы туловища, особенно осевого скелета позвоночного столба, который является опорой для головы, верхних конечностей, органов грудной и брюшной полостей. В связи с прямохождением образовались изгибы позвоночника, развилась мощная дорсальная мускулатура. Кроме того, позвоночник практически неподвижно соединен в парном прочном крестцово-подвздошном сочленении с поясом нижних конечностей (с тазовым поясом), который в биомеханическом отношении служит распределителем тяжести туловища на головки бедренных костей. Наряду с изложенными анатомическими факторами - особенностями строения нижней конечности, туловища, выработанными в процессе антропогенеза для поддержания тела в вертикальном положении, обеспечения устойчивого равновесия и динамики, особое внимание должно быть уделено положению центра тяжести тела. В живом организме положение центра тяжести изменяется в зависимости от перемещения подвижных его частей (движения конечностей, изменение положения головы, наклоны туловища, перемещение внутренних органов и др.). Центр тяжести тела человека находится на уровне II крестцового позвонка; отвесная линия центра тяжести проходит на 5 см позади поперечной оси тазобедренных суставов (приблизительно на 2,6 см кзади от большого вертела) и на 3 см впереди от поперечной оси голеностопного сустава. Центр тяжести головы располагается немного кпереди от поперечной оси атлантозатылочного сустава. Общий центр тяжести головы и туловища находится на уровне середины переднего края Х грудного позвонка. С целью сохранения устойчивого равновесия тела человека на плоскости необходимо, чтобы перпендикуляр, опущенный из центра тяжести, падал на площадь, занимаемую обеими ступнями. Тело стоит тем прочнее, чем шире площадь опоры и чем ниже расположен центр тяжести. Поэтому для всех случаев вертикального положения тела человека сохранение равновесия является главной задачей, так как в противном случае должно последовать падение. Однако, напрягая соответствующие мыщцы, мы можем удержать тело в различных положениях (в известных пределах) даже тогда, когда проекция центра тяжести выведена за пределы площади опоры (сильный наклон туловища вперед, в стороны и т.д.). Вместе с тем стояние и передвижение человеческого тела нельзя считать устойчивым, при относительно длинных ногах человек имеет сравнительно небольшую площадь опоры. Поскольку центр тяжести тела человека расположен относительно высоко (на уровне II крестцового позвонка), а опорная площадь (площадь двух подошв и пространства между ними) незначительна, устойчивость тела очень невелика. Поэтому удержание тела в состоянии равновесия силой мышечных сокращений предотвращает его падение, и части тела (голова, туловище, конечности) удерживаются в надлежащем соотношении для каждого положения тела. Например, если при стоянии будет нарушено соотношение частей тела (вытягивание вперед рук, сгибание позвоночника и т.д.), то соответственно изменяются положение и равновесие других частей тела. Статистические и динамические моменты действия мускулатуры находятся в прямой связи с состоянием положения центра тяжести тела. Поскольку центр тяжести всего тела располагается на уровне II крестцового позвонка позади поперечной линии, соединяющей центры тазобедренных суставов, тенденции туловища (вместе с тазом.) опрокинуться назад противостоят сильно развитые мышцы и связки, укрепляющие тазобедренные суставы. Так обеспечивается равновесие всей верхней части тела, покоящейся на ногах в вертикальном положении. Тенденция тела упасть вперед при стоянии связана также с прохождением вертикали центра тяжести впереди (на 3-4 см) от поперечной оси голеностопных суставов. Падению противостоят действия мышц задней поверхности голени. Если отвесная линия центра тяжести переместится еще дальше кпереди к пальцам, то сокращением задних мышц голени пятка приподнимается, отрывается от плоскости опоры и тогда отвесная линия центра тяжести перемещается вперед и опорой служат пальцы стопы: Кроме опорной, нижние конечности выполняют локомоторную функцию, перемещая тело в пространстве. Например, при ходьбе тело человека совершает поступательное движение, попеременно опираясь то на одну, то на другую ногу; последние поочередно совершают маятникообразные движения. При ходьбе одна из нижних конечностей в определенный момент является опорной (задняя), другая-свободной (передняя). При каждом новом шаге свободная нога становится опорной, а опорная выносится вперед и делается свободной. Сокращения мышц нижней конечности при ходьбе заметно усиливают изогнутость подошвы стопы, увеличивают кривизну ее поперечного и продольного сводов. В этот же момент туловище несколько наклоняется вперед вместе с тазом на головках бедренных костей. Если первый шаг начат правой ногой, то правая пятка, затем середина подошвы и пальцы поднимаются над плоскостью опоры, правая нога сгибается в тазобедренном и коленном суставах и выносится вперед. Одновременно тазобедренный сустав этой стороны и туловище следуют вперед за свободной ногой. Эта (правая) нога энергичным сокращением четырехглавой мышцы бедра выпрямляется в коленном суставе, касается поверхности опоры и становится опорной. В этот момент другая (левая) нога (до начала момента задняя, или опорная) отрывается от плоскости опоры, выносится вперед, становясь передней, свободной ногой. Правая нога в это время остается позади в качестве опорной. Вместе с нижней конечностью передвигается и тело вперед и несколько вверх. Так обе конечности поочередно проделывают одни и те же движения в строго определенной последовательности, подпирая тело то с одной стороны, то с другой и толкая его вперед. Однако во время ходьбы не бывает момента, чтобы обе ноги были одновременно оторваны от поверхности земли (плоскости опоры). Передняя (свободная) конечность успевает всегда коснуться плоскости опоры пяткой раньше, чем задняя (опорная) нога полностью отделится от нее. Этим ходьба отличается от бега и прыжков. Вместе с тем при ходьбе существует момент, когда обе ноги одновременно касаются земли, причем опорная всей подошвой, а свободная пальцами, перед тем как последние отделятся от земли. Чем быстрее ходьба, тем короче момент одновременного прикосновения обеих ног к плоскости опоры. Прослеживая при ходьбе изменения положения центра тяжести, можно отметить движение всего тела вперед, вверх и в стороны в горизонтальной, фронтальной и сагиттальной плоскостях. Наибольшее смещение вперед происходит в горизонтальной плоскости. Смещение вверх и вниз составляет 3-4 см, а в стороны (боковые качания) - на 1-2 см. Характер и степень этих смещений подвержены значительным колебаниям и зависят от возраста, пола и индивидуальных особенностей. Совокупность этих факторов определяет индивидуальность походки, хотя последняя не есть нечто постоянное, так как может изменяться под влиянием тренировки. В среднем длина обычного спокойного шага 66 см и по времени занимает 0,6 с. При ускорении ходьбы момент одновременного касания почвы обеими ногами выпадает, шаг переходит в бег. Поэтому бег отличается от ходьбы тем, что при нем имеют место только попеременная опора и касание площади опоры то одной, то другой ногой.
Момент инерции.
Моментом инерции материальной точки массы m относительно оси называется величина, равная:
I = m·r2, где r - кратчайшее расстояние от оси вращения до точки.
Момент инерции твердого тела равен сумме моментов инерции его частей:
I = Smi·ri2
Следовательно, момент инерции твердого тела зависит от:
- массы тела;
- формы и размеров тела;
- распределения массы относительно оси вращения (при переносе оси вращения или отдельных частей тела его момент инерции изменяется).
Для симметричных тел момент инерции рассчитывается с помощью интегрального исчисления.
15. Момент силы. Рычаги. Виды рычагов в опорно-двигательном аппарате человека.
М омент
силы - векторная величина. Для нахождения
ее направления вектора r и F необходимо
изобразить исходящими из одной точки
и связать с ними правый винт. Затем
головку правого винта нужно вращать
от r к F. Направление
движения винта будет совпадать с вектором
M.
омент
силы - векторная величина. Для нахождения
ее направления вектора r и F необходимо
изобразить исходящими из одной точки
и связать с ними правый винт. Затем
головку правого винта нужно вращать
от r к F. Направление
движения винта будет совпадать с вектором
M.
Величина вектора момента сил равна:
M = r·F·sin(α) = F·R, где R = r·sin(α) - плечо силы, равное кратчайшему расстоянию между осью вращения и линией действия силы.
Рыча́г — простейшее механическое устройство, представляющее собой твёрдое тело (перекладину), вращающееся вокруг точки опоры. Стороны перекладины по бокам от точки опоры называются плечами рычага.
Рычаг используется для получения большего усилия на коротком плече с помощью меньшего усилия на длинном плече (или для получения большего перемещения на длинном плече с помощью меньшего перемещения на коротком плече). Сделав плечо рычага достаточно длинным, теоретически, можно развить любое усилие.
Принцип работы рычага является прямым следствием закона сохранения энергии.
Ч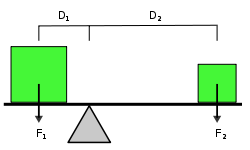 тобы
переместить рычаг на расстояние
тобы
переместить рычаг на расстояние ![]() сила,
действующая со стороны груза, должна
совершить работу равную:
сила,
действующая со стороны груза, должна
совершить работу равную:
![]()
Если посмотреть
с другой стороны, сила, приложенная с
другой стороны, должна совершать работу
![]()
где
![]() — это перемещение конца
рычага, к которому приложена сила
— это перемещение конца
рычага, к которому приложена сила ![]() .
Чтобы выполнялся закон сохранения
энергии для замкнутой системы, работа
действующей и противодействующей сил
должны быть равны, то есть:
.
Чтобы выполнялся закон сохранения
энергии для замкнутой системы, работа
действующей и противодействующей сил
должны быть равны, то есть:
![]()
![]()
Различают:
1) рычаги 1 рода, в которых точка опоры располагается между точками приложения сил (детские качели (перекладина), ножницы);
2) рычаги 2 рода, в которых точки приложения сил располагаются по одну сторону от опоры (точка опоры - колесо), приподнимание предмета ломом движением вверх, тачка;
Среди рычагов 2 рода выделяют рычаги 3 рода, с точкой приложения "входящей" силы ближе к точке опоры, чем нагрузки, что даёт выигрыш в скорости и пути задняя дверь или капот легковых автомобилей на газовых пружинах, подъём кузова самосвала (с гидроцилиндром в центре), движение мышцами рук и ног человека и животных.
Костные рычаги – звенья тела, подвижно соединённые в суставах под действием приложенных сил, могут либо сохранять своё положение, либо изменять его. Они служат для передачи движения и работы на расстояние.
Когда силы приложены по обе стороны от оси (точки опоры) рычага, его называют двуплечим, а когда по одну сторону – одноплечим. Для разных мышц, прикреплённых в разных местах костного звена, рычаг может быть разного рода. В природе существуют три рода рычагов: рычаги I-го («весы»), II-го(«тачка») и III-го(«подъемный кран») родов.
Каждый рычаг имеет следующие элементы:
– точку опоры (ось вращения, точка 0);
– как минимум две силы (f и F);
– точки приложения этих сил (А и В);
– плечи рычага (расстояния от точки опоры до точек приложения сил – АО и ВО);
– плечи сил (наикратчайшие расстояния от точки опоры до линий действий сил – опущенные на неё перпендикуляры АО и 0В).
Мерой действия силы на рычаг служит её момент относительно точки опоры – вращательный момент. Момент силы определяется произведением силы на плечо этой силы.
Mf = F * OВ
Mf= F * АО
Момент силы – это векторная величина. Если сила лежит не в плоскости, перпендикулярной оси, то находят составляющую силы, лежащую в этой плоскости. Она и вызывает момент силы относительно оси. Остальные составляющие на момент силы не влияют .
Когда противоположные относительно оси сустава моменты сил равны, звено либо сохраняет своё положение, либо продолжает движение с постоянной скоростью (моменты сил уравновешены). Если же один из моментов сил больше другого, звено получает ускорение в направлении его действия.
В опорно-двигательном аппарате присутствуют рычаги всех трёх родов, причём значительно больше рычагов III-го рода, рычагов скорости, так как мышцы крепятся в основном вблизи суставов.
Таким образом, двигательный аппарат человека по природе своей в большей степени быстрый и ловкий, чем сильный. Кроме этого, во всех костных рычагах имеются потери в силе ввиду того, что мышцы крепятся к костям под острым или тупым углом.
Движущиеся части механизмов обычно бывают соединены частями. Подвижное соединение нескольких звеньев образует кинематическую связь. Тело человека – пример кинематической связи. Опорно-двигательная система человека, состоящая из сочлененных между собой костей скелета и мышц, представляет с точки зрения физики совокупность рычагов, удерживаемых человеком в равновесии. В анатомии различают рычаги силы, в которых происходит выигрыш в силе, но проигрыш в перемещении, и рычаги скорости, в которых, проигрывая в силе, выигрывают в скорости перемещения. Хорошим примером рычага скорости является нижняя челюсть. Действующая сила осуществляется жевательной мышцей. Противодействующая сила – сопротивление раздавливаемой пищи – действует на зубы. Плечо действующей силы значительно короче, чем у сил противодействия, поэтому жевательная мышца короткая и сильная. Когда надо разгрызть что-либо зубами, уменьшается плечо силы сопротивления.
Если рассматривать скелет как совокупность отдельных звеньев, соединенных в один организм, то окажется, что все эти звенья при нормальной стойке образуют систему, находящуюся в крайне неустойчивом равновесии. Так, опора туловища представлена шаровыми поверхностями тазобедренного сочленения. Центр массы туловища расположен выше опоры, что при шаровой опоре создает неустойчивое равновесие. То же относится и к коленному соединению, и к голеностопному. Все эти звенья находятся в состоянии неустойчивого равновесия.
Центр массы тела человека при нормальной стойке расположен как раз на одной вертикали с центрами тазобедренного, коленного и голеностопного сочленений ноги, на 2–2,5 см ниже мыса крестца и на 4–5 см выше тазобедренной оси. Таким образом, это самое неустойчивое состояние нагроможденных звеньев скелета. И если вся система держится в равновесии, то только благодаря постоянному напряжению поддерживающих мышц.
Механическая работа, которую способен совершить человек в течение дня, зависит от многих факторов, поэтому трудно указать какую-либо предельную величину. Это относится и к мощности. Так, при кратковременных усилиях человек может развивать мощность порядка нескольких киловатт. Если спортсмен массой 70 кг подпрыгивает с места так, что его центр массы поднимается на 1 м по отношению к нормальной стойке, а фаза отталкивания длится 0,2 с, то он развивает мощность около 3,5 кВт. При ходьбе человек совершает работу, так как при этом энергия затрачивается на периодическое небольшое поднятие конечностей, главным образом ног.
Работа обращается в нуль, если перемещения нет. Поэтому, когда груз находится на опоре или подставке или подвешен на шест, сила тяжести не совершает работы. Однако, если держать неподвижно на вытянутой руке гирю или гантель, отмечается усталость мышц руки и плеча. Точно так же устают мышцы спины и поясничной области, если сидящему человеку поместить на спину груз.
16. Уравнение моментов для вращательного движения (II закон Ньютона).
Конечно, положение одной, даже «особой», точки далеко не полностью описывает движение всей рассматриваемой системы тел, но все-таки лучше знать положение хотя бы одной точки, чем не знать ничего. Тем не менее рассмотрим применение законов Ньютона к описанию вращения твердого тела вокруг фиксированной оси1. Начнем с простейшего случая: пусть материальная точка массы m прикреплена с помощью невесомого жесткого стержня длиной r к неподвижной оси ОО/ .
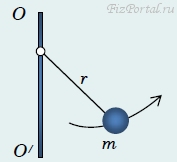
![]()
Материальная точка может двигаться вокруг оси, оставаясь от нее на постоянном расстоянии, следовательно, ее траектория будет являться окружностью с центром на оси вращения. Безусловно, движение точки подчиняется уравнению второго закона Ньютона Однако непосредственное применение этого уравнения не оправдано: во-первых, точка обладает одной степенью свободы, поэтому в качестве единственной координаты удобно использовать угол поворота, а не две декартовые координаты; во-вторых, на рассматриваемую систему действуют силы реакции в оси вращения, а непосредственно на материальную точку − сила натяжения стержня. Нахождение этих сил представляет собой отдельную проблему, решение которой излишне для описания вращения. Поэтому имеет смысл получить на основании законов Ньютона специальное уравнение, непосредственно описывающее вращательное движение.
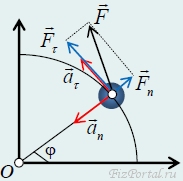
Пусть в некоторый момент времени на материальную точку действует некоторая сила F, лежащая в плоскости, перпендикулярной оси вращения (рис. 107).
![]()
рис. 107
При кинематическом описании криволинейного движения вектор полного ускорения а удобно разложить на две составляющие − нормальную аn, направленную к оси вращения, и тангенциальную аτ, направленную параллельно вектору скорости. Значение нормального ускорения для определения закона движения нам не нужно. Конечно, это ускорение также обусловлено действующими силами, одна из которых − неизвестная сила натяжения стержня. Запишем уравнение второго закона в проекции на тангенциальное направление: Заметим, что сила реакции стержня не входит в это уравнение, так как она направлена вдоль стержня и перпендикулярна выбранной проекции. Изменение угла поворота φ непосредственно определяется угловой скоростью
ω = Δφ/Δt,
изменение которой, в свою очередь, описывается угловым ускорением
ε = Δω/Δt.
Угловое ускорение связано с тангенциальной составляющей ускорения соотношением
аτ = rε.
Если подставим это выражение в уравнение (1), то получим уравнение, пригодное для определения углового ускорения. Удобно ввести новую физическую величину, определяющую взаимодействие тел при их повороте. Для этого умножим обе части уравнения (1) на r:
mr2ε = Fτr. (2)
Рассмотрим выражение в его правой части Fτr, имеющее смысл произведения тангенциальной составляющей силы на расстояние от оси вращения до точки приложения силы. Это же произведение можно представить в несколько иной форме (рис. 108):
р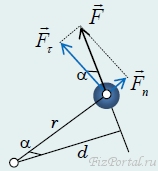 ис.
108
ис.
108
M = Fτr = Frcosα = Fd,
здесь d − расстояние от оси вращения до линии действия силы, которое также называют плечом силы. Эта физическая величина − произведение модуля силы на расстояние от линии действия силы до оси вращения (плечо силы) М = Fd − называется моментом силы. Действие силы может приводить к вращению как по часовой стрелке, так и против часовой стрелки. В соответствии с выбранным положительным направлением вращения следует определять и знак момента силы. Заметьте, что момент силы определяется той составляющей силы, которая перпендикулярна радиус-вектору точки приложения. Составляющая вектора силы, направленная вдоль отрезка, соединяющего точку приложения и ось вращения, не приводит к раскручиванию тела. Эта составляющая при закрепленной оси компенсируется силой реакции в оси, поэтому не влияет на вращение тела.
Запишем еще одно полезное выражения для момента силы. Пусть сила F приложена к точке А, декартовые координаты которой равны х, у (рис. 109).
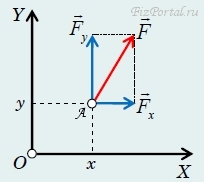
рис. 109
Разложим силу F на две составляющие Fх, Fу, параллельные соответствующим осям координат. Момент силы F относительно оси, проходящей через начало координат, очевидно равен сумме моментов составляющих Fх, Fу, то есть
М = хFу − уFх.
Аналогично, тому, как нами было введено понятие вектора угловой скоро¬сти, можно определить также и понятие вектора момента силы. Модуль этого вектора соответствует данному выше определению, направлен же он перпендикулярно плоскости, содержащей вектор силы и отрезок, соединяющий точку приложения силы с осью вращения (рис. 110).
р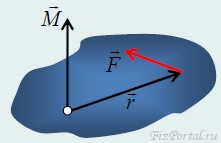 ис.
110
ис.
110
![]()
Вектор момента силы также может быть определен как векторное произведение радиус-вектора точки приложения силы на вектор силы
Заметим, что при смещении точки приложения силы вдоль линии ее действия момент силы не изменяется. Обозначим произведение массы материальной точки на квадрат расстояния до оси вращения
mr2 = I
(эта величина называется моментом инерции материальной точки относительно оси). С использованием этих обозначений уравнение (2) приобретает вид, формально совпадающий с уравнением второго закона Ньютона для поступательного движения:
Iε = M. (3)
Это уравнение называется основным уравнением динамики вращательного движения. Итак, момент силы во вращательном движении играет такую же роль, как и сила в поступательном движении, − именно он определяет изменение угловой скорости. Оказывается (и это подтверждает наш повседневный опыт), влияние силы на скорость вращения определяет не только величина силы, но и точка его приложения. Момент инерции определяет инерционные свойства тела по отношению к вращению (говоря простым языком − показывает, легко ли раскрутить тело): чем дальше от оси вращения находится материальная точка, тем труднее привести ее во вращение. Уравнение (3) допускает обобщение на случай вращения произвольного тела. При вращении тела вокруг фиксированной оси угловые ускорения всех точек тела одинаковы. Поэтому аналогично тому, как мы проделали при выводе уравнения Ньютона для поступательного движения тела, можно записать уравнения (3) для всех точек вращающегося тела и затем их просуммировать. В результате мы получим уравнение, внешне совпадающее с (3), в котором I − момент инерции всего тела, равный сумме моментов составляющих его материальных точек, M − сумма моментов внешних сил, действующих на тело. Покажем, каким образом вычисляется момент инерции тела. Важно подчеркнуть, что момент инерции тела зависит не только от массы, формы и размеров тела, но и от положения и ориентации оси вращения. Формально процедура расчета сводится к разбиению тела на малые части, которые можно считать материальными точками (рис. 111),
р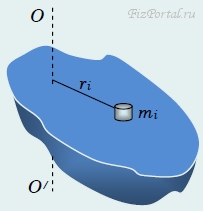 ис.
111
ис.
111
![]()
и суммированию моментов инерции этих материальных точек, которые равны произведению массы на квадрат расстояния до оси вращения: Для тел простой формы такие суммы давно подсчитаны, поэтому часто достаточно вспомнить (или найти в справочнике) соответствующую формулу для нужного момента инерции. В качестве примера: момент инерции кругового однородного цилиндра, массы m и радиуса R, для оси вращения, совпадающей с осью цилиндра равен:
I = (1/2)mR2 (рис. 112).
р ис.
112
ис.
112
1В данном случае мы ограничиваемся рассмотрением вращения вокруг фиксированной оси, потому что описание произвольного вращательного движения тела представляет собой сложную математическую проблему, далеко выходящую за рамки курса математики средней школы. Знания же других физических законов, кроме рассматриваемых нами, это описание не требует.
Известно, что изменение скорости тела, т. е. появление ускорения, всегда происходит под действием на данное тело окружающих его тел. Для характеристики этих действий введено понятие силы.
Силой называют векторную величину, характеризующую такое действие на данное тело других тел (или полей), которое может вызвать ускорение и деформацию тела (здесь мы имеем в виду произвольное твердое тело, а не материальную точку).
Если на данное тело действует только одна сила, она обязательно вызывает и ускорение и деформацию тела. Если же на тело одновременно действуют несколько сил, то возможен и случай их компенсации (уравновешивания) и тело может не получать ускорения.
Поскольку сила способна вызывать и ускорение и деформацию тел, оба эти действия могут быть использованы для измерения силы и установления единицы ее измерения.
Динамометры и пружинные весы служат для измерения силы по производимой ею деформации. Использовав соотношение, существующее между силой, массой и ускорением, которое было впервые установлено Ньютоном и получило название второго закона Ньютона, можно определить силу по вызываемому ею ускорению. Наблюдения показывают, что если действовать одной и той же силой (например, силой упругости растянутой пружины) на тела различной массы, то модули ускорений, получаемых телами под действием этой силы, окажутся обратно пропорциональными массами этих тел, т. е.
a1/a2=m2/m1.
Из наблюдений следует также, что если на одно и то же тело поочередно действовать различными силами, то модули ускорений, получаемых телом под действием этих сил, окажутся пропорциональными модулям этих сил, т. е.
a1/a2=F1/F2.
Из последних двух формул видно, что а = F/m, следовательно, F=ma, или в векторной форме
Формула F=ma выражает второй закон Ньютона, который формулируют так: сила, действующая на тело, равна произведению массы тела на ускорение, сообщаемое этому телу силой.
В виде (2.3) второй закон Ньютона справедлив для нерелятивистского движения материальных точек и нерелятивистского поступательного движения твердых тел. Одновременное действие на тело нескольких сил эквивалентно действию одной силы (равнодействующей), которая равна векторной сумме данных сил:
F=SFi.
Существует принцип независимости действия сил, согласно которому: если на тело действуют одновременно несколько сил, действие каждой из них можно рассматривать независимо от остальных.
17. Что такое момент импульса тела? При каком условии сохраняется момент импульса
системы? Привести примеры.
Моме́нт и́мпульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Следует учесть, что вращение здесь понимается в широком смысле, не только как регулярное вращение вокруг оси. Например, даже при прямолинейном движении тела мимо произвольной воображаемой точки, не лежащей на линии движения, оно также обладает моментом импульса. Наибольшую, пожалуй, роль момент импульса играет при описании собственно вращательного движения. Однако крайне важен и для гораздо более широкого класса задач (особенно — если в задаче есть центральная или осевая симметрия, но не только в этих случаях).
Закон
сохранения момента импульса. Условия
равновесия тел. Закон Ньютона
для вращательного движения. Второй
закон Ньютона для частицы, движущейся
под действием силы F, может быть
записан в виде:
 ,где p
= mv - импульс частицы. Умножим это
уравнение векторно на радиус-вектор
частицы r. Тогда
,где p
= mv - импульс частицы. Умножим это
уравнение векторно на радиус-вектор
частицы r. Тогда
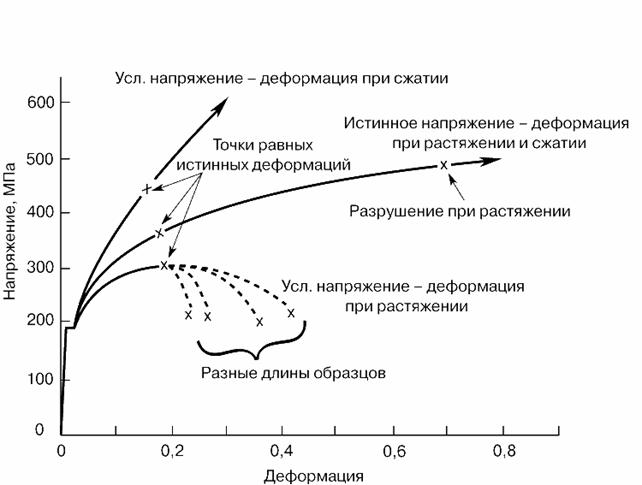
18. Виды деформаций. Модуль Юнга. Кривая деформации и разрушение тел. Жевание
коренными зубами и резцами.


Деформация растяжения возникает тогда, когда на стержень или трос действуют внешние силы, приложенные к их концам, направленные в разные стороны и совпадающие с продольной осью этих тел.
При этом наблюдается не только удлинение тела, но и уменьшение площади его поперечного сечения. Деформация сжатия наблюдается в стержнях относительно коротких под действием внешних сил, направленных навстречу друг другу. Этот вид деформации невозможен в тросах и стержнях относительно длинных. В длинных стержнях может возникнуть явление продольного изгиба тела или иного вида в зависимости от способа крепления стержня. При продольном изгибе возможно и частичное сжатие.
Сжатие или любой другой вид деформации может иметь место под действием как статической, так и динамической нагрузки.
Деформация сдвига возникает тогда, когда на тело, например брусок, действует сила параллельно основанию. В этом случае происходит смещение горизонтальных слоев в теле относительно друг друга без изменения их размеров.
Отрезок, на который сместился верхний слой тела толщиной х, называют абсолютным сдвигом— углом сдвига. Деформации сдвига подвержены болтовые, заклепочные и шпоночные соединения деталей. Этот вид деформации наблюдается также в местах крепления балок, в шлицевых соединениях и т. д.; в элементах бытовых конструкций: стульях, столах и прочей мебели.
Деформация изгиба возникает тогда, когда на балку, установленную на опорах, действуют поперечные силы (направлены перпендикулярно детали) и вызывают изгиб, получивший название поперечного. Поперечному изгибу подвергаются фермы мостов, балки перекрытий в зданиях, а также доски пешеходных мостиков и т. д.
Представим себе балку, состоящую из продольных горизонтальных слоев. При изгибе балки ее слои с выпуклой стороны растягиваются, а с вогнутой — сжимаются. Средний слой деформации не подвергается, его называют нейтральным. Наибольшему растяжению и сжатию подвергаются крайние слои. Поэтому для уменьшения изгиба балки следует металл распределять на верхней и нижней границах балки. В плоскости нейтрального слоя толщина металла может быть небольшой. Этим объясняется создание двутавровых балок. Если балка должна оказывать по всем направлениям одинаковое сопротивление изгибу, то наиболее выгодной будет трубчатая форма балки.
Рамы велосипедов и мотоциклов, фабричные трубы, стебли многих растений и кости животных имеют трубчатую форму.
Деформация кручения сопровождается поворотом поперечных сечений стержня вокруг его оси. Такая деформация имеет место в том случае, когда к концам стержня приложены пары сил, действующих в плоскостях концевых поперечных сечений и имеющих равные моменты. Моменты этих пар называют крутящими моментами.
Деформацию скрученного стержня можно представить как результат поворота сечений. Угол поворота ф одного сечения относительно другого, находящегося от него на расстоянии l0, называется углом закручивания стержня длиной l0. Угол закручивания, отнесенный к единице длины стержня, называется относительным углом закручивания:
Срез — предельный случай сдвига, когда силы упругости не могут уравновесить внешних сил. Примером среза в технике может служить разрушение заклепочных и болтовых соединений, в которых внешние силы действуют перпендикулярно оси болтов и заклепок, а также на примере штамповки деталей. На явлении среза основана работа режущего инструмента, в частности ножниц.
Модуль Юнга (модуль упругости) — физическая величина, характеризующая свойства материала сопротивляться растяжению/сжатию при упругой деформации[1]. Назван в честь английского физика XIX века Томаса Юнга.
![]()
где:
E — модуль упругости, измеряемый в паскалях
F — сила в ньютонах,
S — площадь поверхности, по которой распределено действие силы,
l — длина деформируемого стержня,
x — модуль изменения длины стержня в результате упругой деформации (измеренного в тех же единицах, что и длина l).
Через модуль Юнга вычисляется скорость распространения продольной волны в тонком стержне:
 где
где ![]() — плотность вещества.
— плотность вещества.
Жевание — физиологический акт, заключающийся в измельчении с помощью зубов пищевых веществ и формировании пищевого комка. Жевание обеспечивает качество механической обработки пищи и определяет время ее пребывания в полости рта, оказывает рефлекторное возбуждающее влияние на секреторную и моторную деятельность желудка и кишечника. В жевании участвуют верхняя и нижняя челюсти, жевательная и мимическая мускулатура лица, язык, мягкое небо.
Механическая обработка пищи между верхними и нижними рядами зубов осуществляется благодаря перемещению нижней челюсти относительно верхней. У взрослого человека в ряду справа и слева имеются зубы разного функционального назначения — два резца и один клык (откусывающие пищу), два малых и три больших коренных, которые раздавливают и растирают пищу, — всего 32 зуба.

Рис. 11.10. Кимограмма жевательного периода. I — покой жевательной мускулатуры; II — фаза введения пищи в рот; III — ориентировочная фаза; IV — основная фаза; V — фаза формирования пищевого комка; а—б — опускание нижней челюсти, б—в — подъем нижней челюсти; о—о, — момент размалывания пищи. Под кимо-граммой — отметка времени — 1 с.
Процесс жевания имеет четыре фазы: