

Контрольные вопросы.
Требования, предъявляемые к эл.приводу грузоподъемных механизмов.
Объяснить как регулируется скорость в данном эл.приводе.
Назначение командоконтроллера;
Работа схемы при реверсе; при торможении; при переключении скоростей;
Какие виды защит предусмотрены в схеме;
С какой целью установлено реле напряжения с выдержкой времени и почему на постоянном токе;
Какая реакция произойдет в эл.приводе при подъеме груза выше
номинального;
Что произойдет, если в процессе спуска исчезнет питание.
Порядок выполнения работы.
Приготовить схему к пуску:
Включить автоматический выключатель, подающий питание на схему, проверить наличие напряжения (смотри на вольтметр),
Вставить и переключить в положение «включено» ручную съемную рукоятку - подготовить командоконтроллер к работе,
Поставить пакетный переключатель в положение выбранного борта.
Открыть дверцу магнитной станции и проследить работу (срабатывание электрических аппаратов) в процессе управления электроприводом.
Осуществить управление работой электропривода в режимах «Спуск» и «Подъем» с помощью командоконтроллера и проверить правильность срабатывания электрических аппаратов в схеме управления.
Изучить работу релейно-контакторной схемы управления, проводя цепочки срабатывания элементов схемы, давая им краткую характеристику.
Содержание отчета.
Титульный лист, выполненный с учетом требований нормативных документов;
Принципиальная релейно-контакторная схема управления эл.приводом грузовой лебедки;
Ответы на контрольные вопросы.
Лабораторная работа № 2
РЕЛЕЙНО – КОНТАКТОРНАЯ СХЕМА УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОМ БРАШПИЛЯ (на переменном токе)
Цель работы
1. Ознакомиться с назначением, конструкцией брашпиля.
2. Изучить релейно-контакторную схему управления электроприводом брашпиля.
3. Приобрести практические навыки управления электроприводом брашпиля.
Теоретический раздел
Характеристика эл.привода ЯШУ и особенности эксплуатации.
Якорно-швартовные устройства предназначены для опускания и поднятия якорей при постановке судна на якорь и съемки с якоря, для обеспечения надежной стоянки судна, а также для выполнения швартовных операций. Якорно-швартовное устройство включает в себя исполнительный двигатель с аппаратурой управления, якорно-швартовную лебедку, якорные цепи и якоря.
К якорно-швартовным лебедкам относятся: брашпили, шпили и швартовные лебедки. Их электроприводы имеют много общего и по существу представляют собой одну группу. Якорно-швартовные механизмы обеспечивают оперативное выполнение якорно-швартовных операций, определяющих мореходные качества судна, а также его технико-экономические показатели.
Кинематическая схема механизма брашпиля представлена на рисунке 1.
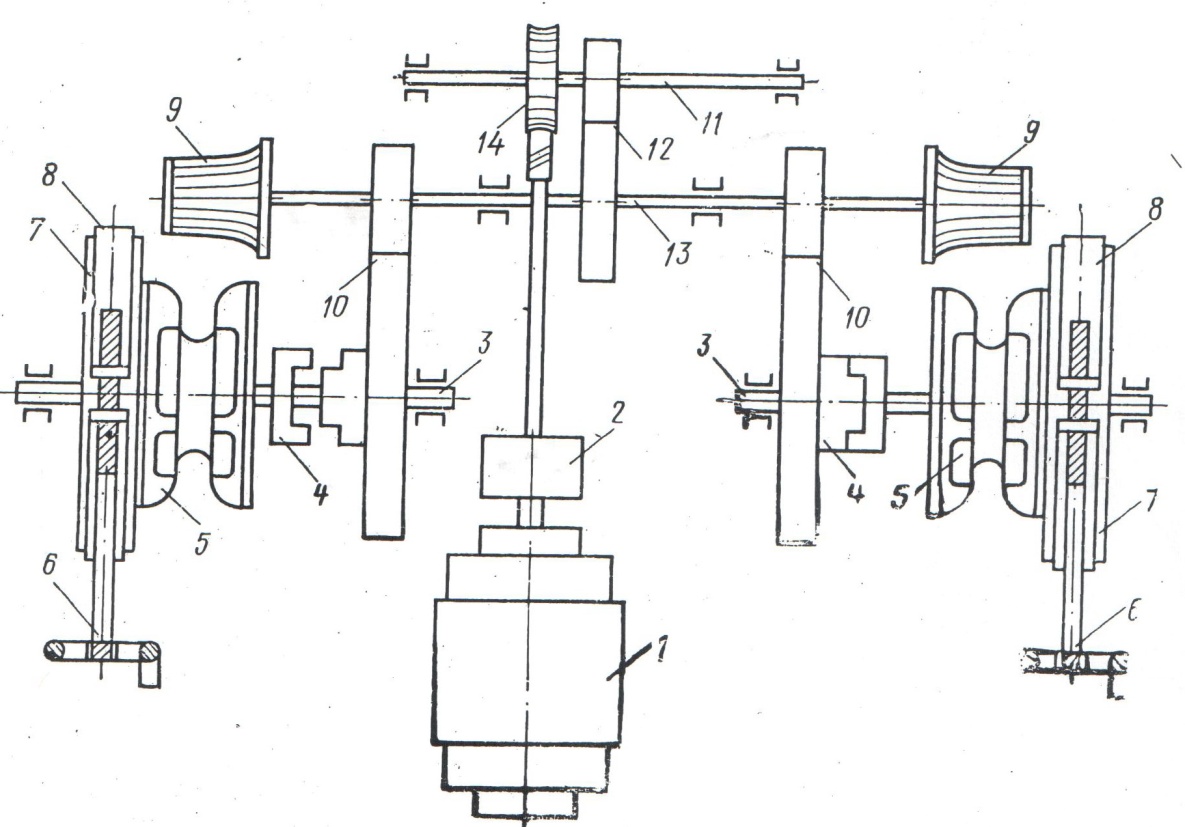
Рисунок 1 - Кинематическая схема механизма брашпиля
Электродвигатель 1 через предохранительную фрикционную муфту 2 соединен червячным редуктором 11 и вращает промежуточный вал 12. Через пару шестерен 13 вращение передается на главный вал 14, на котором закреплены турачки 9. С этим валом при помощи двух одинаковых пар зубчатых колес 10 соединены два грузовых вала 3. На них могут свободно вращаться пятиугольные якорные звездочки или цепные барабаны 5, выполненные заодно с тормозными колесами 7. Эти колеса охвачены лентой 8 ленточного тормоза с ручным приводом. Цепные барабаны при помощи кулачкового устройства 4 с ручным приводом могут присоединяться к большим зубчатым колесам и вращаться вместе с ними.
Расположение якорного устройства на носу судна показано на рисунке 2
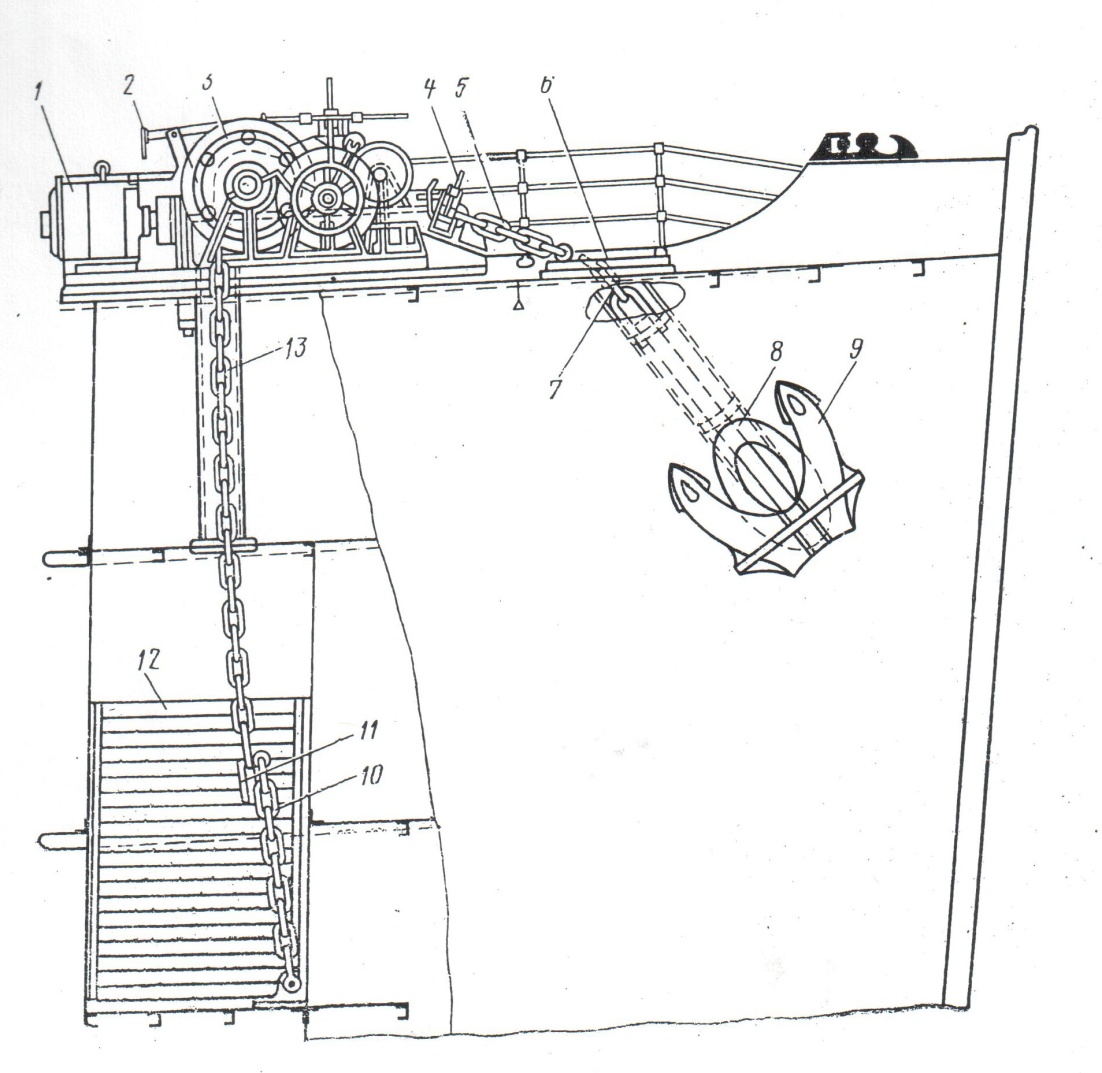
Рисунок 2.- Якорно-швартовное устройство
В походном состоянии якорь 9 втянут в клюз 8; цепь 5, проходящая через клюзную трубу 7 и палубный клюз 6, натянута и зажата винтовым стопором 4. Вторая ветвь цепи переброшена через звездочку брашпиля 3, пропущена через цепную трубу 13 и уложена в цепном ящике 12. Конец цепи прикреплен при помощи глаголь-гака 11 к жвака-галсу 10 – короткому отрезку цепи, наглухо соединенному с корпусом судна. Таких цепей с якорями на судне две – по одной на каждый борт. При остановке судна на якорь стопор освобождают и вытравливают цепь за борт, придерживая цепочку брашпиля ленточным тормозом с ручным приводом 2 или работая электродвигателем 1 в тормозном режиме. Якорь, достигнув дна, закрепляется за грунт и удерживает судно. В зависимости от условий стоянки, судно может стоять на одном или двух якорях. Во время снятия с якоря выбирают брашпилем цепь, втягивают якорь в клюз и закрепляют его по-походному. Брашпиль предназначен также для швартовных операций. Он может наматывать на свои швартовные барабаны – турачки – пеньковые канаты или стальные тросы – швартовы и подтягивать нос судна к причалу или к другому судну, где закреплены их концы.
К самой многочисленной группе относятся якорно-швартовные эл.приводы переменного тока с трехскоростными асинхронными двигателями с числом пар полюсов 2р=4/8/16, что обеспечивает изменение рабочих скоростей в отношении 4:2:1. При этом малая скорость предназначается для втягивания якоря в клюз и плавного подтягивания судна к причалу, вторая – для выбирания якорной цепи и подъема якоря или выбирания нагруженного троса, а третья – для выбирания ненагруженного швартовного троса. АД якорно-швартовных приводов однотормозные с пристроенным электромагнитным тормозом. Номинальную мощность электродвигателей принято относить к 30-ти минутному кратковременному режиму работы. Для выбора мощности эл.привода брашпиля сначала предварительно выбирают эл.двигатель по перегрузочной способности, а, затем, зная его механическую характеристику, строят нагрузочную диаграмму, определяют эквивалентный момент, и, сравнивая его с номинальным моментом выбранного эл.двигателя, проверяют последний на нагрев.
На современных судах преимущественное распространение получили релейно-контакторные схемы управления электроприводом брашпиля – комплектные устройства в виде магнитных станций (магнитных контроллеров) располагаемых под палубой. Такая система управления обеспечивает пуск, регулирование режимов работы и необходимую электрическую загрузку электропривода. Командоконтроллер располагается на палубе. Вращение маховика контроллера по часовой стрелке должно соответствовать подъему якоря, против часовой стрелки – спуску якоря. Наиболее широкое применение на судах получили брашпили с трехскоростными короткозамкнутыми асинхронными двигателями типа МАП, имеющими встроенные дисковые электромагнитные тормоза.
К самой многочисленной группе относятся якорно-швартовные эл.приводы переменного тока с трехскоростными асинхронными двигателями с числом пар полюсов 2р=4/8/16, что обеспечивает изменение рабочих скоростей в отношении 4:2:1. При этом малая скорость предназначается для втягивания якоря в клюз и плавного подтягивания судна к причалу, вторая – для выбирания якорной цепи и подъема якоря или выбирания нагруженного троса, а третья – для выбирания ненагруженного швартовного троса. АД якорно-швартовных приводов однотормозные с пристроенным электромагнитным тормозом. Номинальную мощность электродвигателей принято относить к 30-ти минутному кратковременному режиму работы. Для выбора мощности эл.привода брашпиля сначала предварительно выбирают эл.двигатель по перегрузочной способности, а, затем, зная его механическую характеристику, строят нагрузочную диаграмму, определяют эквивалентный момент, и, сравнивая его с номинальным моментом выбранного эл.двигателя, проверяют последний на нагрев.
Эл.приводу ЯШУ свойственны следующие основные режимы:
- режим съемки судна с одного якоря можно разбить на 4 стадии:
1 стадия: брашпиль выбирает цепь, втягивая ее звенья в клюз, и судно под действием эл.привода якорного устройства движется с небольшой постоянной скоростью к месту заложения якоря (на второй скорости);
2 стадия: брашпиль продолжает втягивать якорь в клюз, а судно продолжает двигаться практически равномерно вследствие приобретенной инерции, натяжение цепи достигает максимального значения;
3 стадия: брашпиль выбирает слабину, образующуюся вследствие движения судна по инерции (натяжение максимально и двигатель может остановиться), судно над местом заложения якоря, происходит выворачивание якоря и отрыв его от грунта;
2 стадия: брашпиль выбирает свободно висящую цепь и якорь (вторая скорость) и плавное втягивание якоря в клюз (тихоходная - первая скорость)
- одновременный подъем двух якорей осуществляется с половинной глубины стоянки при предварительном отдельном отрыве каждого якоря от грунта;
- швартовый режим – характеризуется усилием троса, при притягивании судна швартовыми (вторая скорость).
Требования, предъявляемые к ЯШУ, учитывая особенности эксплуатации электрооборудования якорно-швартовных механизмов:
безотказность в работе электрических машин (при отсутствии резервирования) и пускорегулирующей аппаратуры (при малой годовой наработке, вследствие длительного пребывания в неработающем состоянии);
стойкость к влиянию внешних факторов, а также усиленный контроль за состоянием электрооборудования (влияние вредных факторов окружающей среды и различного рода механических воздействий, в том числе волн);
съемку судна с якоря при любом состоянии погоды и моря;
возможность пуска при полной нагрузке;
широкий диапазон и достаточную плавность регулирования частоты вращения исполнительного двигателя, обеспечивающие нормальную скорость подъема якоря и минимальную скорость подхода якоря к клюзу;
возможность работы как при выбирании, так и при травлении;
удержание якоря на весу при снятом напряжении;
тормозное травление якоря с ограниченной скоростью;
управлять ЯШУ допускаются только лица, прошедшие соответствующее обучение и подготовку;
высокая надежность защитных устройств от перегрузок, вследствие частой работы на быстроходной обмотке;
высокие требования к вентиляции.
Опыт показывает, что большое количество поломок брашпилей и выхода из строя электродвигателей происходит по причине их перегрузки. Перегрузка возникает из-за увеличения интенсивности работы выше расчетной, обрыва одной фазы питающей сети, ухудшение вентиляции, неисправностей редуктора, тормоза и.т.д. Кроме того электропривод брашпилей и шпилей должен быть постоянно готов к действию, быть надежным и безопасным в работе, иметь простую и удобную схему управления.
Требования правил Морского Регистра к якорно-швартовным электроприводам.
Мощность электропривода якорного механизма должна обеспечивать выбирание якорной цепи со скоростью не меньшей 0,17 м/с при тяговом усилии на звездочке не менее определяемого по формуле(Н):

Указанную мощность электродвигатель должен развивать в течение 30 мин с последующей стоянкой под током не менее 30 сек.
Пусковой момент электропривода должен обеспечивать тяговое усилие не менее 2T1;
Привод якорно-швартовного механизма должен обеспечивать одновременное выбирание двух свободно висящих якорей с половины номинальной глубины стоянки. Эта нагрузка создает усилие T2=1,32Т1. Таким образом, выполнение данного требования регламентирует пуск привода при моменте статической нагрузки не менее 130% номинального.
При подходе якоря к клюзу привод должен развивать скорость цепи не выше 0,17м/с, предпочтительней 0,12м/с.
Питание электроприводов якорно-швартовных механизмов должно производиться от ГРЩ.
Привод швартовного механизма должен обеспечивать непрерывное выбирание швартовного троса при номинальном тяговом усилии с номинальной скоростью в течении не менее 30 мин. Скорость выбирания при этом не должна превышать 0,3м/с.
Привод швартовного механизма должен развивать кратковременно (около 15сек) усилие не менее двукратного номинального и не выше четырехкратного номинального.
У якорно-швартовных шпилей, брашпилей и лебедок на ступенях скоростей, предназначенных только для швартовных операций, должна быть предусмотрена соответствующая защита от перегрузок электропривода;
Стоянка под током при номинальном напряжении для электродвигателей швартовных механизмов должна составлять не менее 15сек после 30 мин работы при номинальной нагрузке.
Рассмотрим контакторную схему управления трехскоростным асинхронным двигателем с помощью командоконтроллера.
РЕЛЕЙНО-КОНТАКТОРНАЯ СХЕМА УПРАВЛЕНИЯ БРАШПИЛЯ
КВ




Релейно-контакторная схема управления электроприводом якорно-швартовного устройства (брашпиль).
Типовая контакторная схема электропривода якорно-швартовного устройства, применяемая для управления трехскоростным трехобмоточным асинхронным электродвигателем (АД) мощностью 75 кВт. Управление электроприводом производится посредством командоконтроллера с тремя рабочими положениями в двух направлениях вращения. Переключение контактов контроллера при различных положениях приводит к подключению обмотки статора с определенным числом полюсов и этим достигается регулирование скорости.
Схема симметрична (работает одинаково в сторону «Выбирать» и «Травить») и поэтому ее работа рассматривается только в положении «Выбирать».
Подготовка схемы к пуску:
Подаем питание на схему – включаем автоматический выключатель QF(на схеме не показан, находится в щите управления), нажатием на педаль включаем выключатель ВУ1.
В нулевом положении командоконтроллера при подаче напряжения на схему через размыкающие контакты реле РН и замкнутый контакт командоконтроллера К3 питание поступает на выпрямительный мост (ВП) и от выпрямителя получают питание реле напряжения РН, промежуточное реле РП1, и реле времени РУ. Реле РН срабатывает - перебрасывает свои контакты и замыкаются два других контакта, которые шунтируют контакты командоконтроллера К3 (подготавливается цепь нулевой защиты). Кроме того, в нулевом положении командоконтроллера через контакт К13, контакты грузового реле РГ и промежуточного реле РП2 получает питание катушка реле РП1. Его замыкающий контакт замыкается в цепи катушки контактора КС3, а размыкающий контакт размыкается в цепи контактора КС2. Другим замыкающим контактом промежуточное реле РП1 шунтирует контакт К13, через контакт К13 и контакт реле РП1 включается сигнальная лампа ЛС. – световой сигнал наличия напряжения в цепи. Срабатывает реле РУ (реле с выдержкой времени) и переключает свои контакты в цепи контактора КС3, т.е. размыкает свой контакт в цепи контактора КС3 и замыкает свой контакт в цепи контактора КС2. Схема готова к пуску.
При переводе рукоятки командоконтроллера в первое положение «Выбирать» замыкаются контакты командоконтроллера К5, К11 и К7, а контакты К3, К4 и К13 размыкаются. Через контакты К5 получает питание реверсивный контактор КВ(Вперед) и своими главными контактами частично подключает питание на двигатель. Через контакт К11 включается контактор тормоза КТ; происходит растормаживание двигателя тормозным магнитом ТМ, а после срабатывания контактора КТ, замыкается его блок–контакт и через замкнутый контакт К7 включается контактор первой скорости КС1. Его главные контакты подключают тихоходную обмотку статора двигателя, и начинается его работа на малой скорости, которая служит для втягивания якоря в клюз и для швартования с малой скоростью. Несмотря на размыкание контактов командоконтроллера К4 реле РУ через замыкающий контакт КС1 продолжает получать питание, а через другой замыкающий контакт КС1 (вместо разомкнувшихся контактов КТ) продолжает получать питание реле РН.
При переводе рукоятки командоконтроллера во второе положение размыкаются контакты К7, а К8 – замыкаются. В результате этого контактор КС1 теряет питание и отключает тихоходную обмотку, а по цепи ВУ1-РН-К5- КВ- К11-КТ-КС1-К8 получает питание контактор второй скорости КС2 и производит включение своей обмотки. Теперь реле РН питается через контакты КС2, а реле РУ выключается.
Если рукоятку командоконтроллера перевести в третье положение, то размыкаются контакты К8 и замыкаются К10. Размыканием контактов К8 отключается контактор КС2 и если к этому моменту выдержка времени у реле РУ окончилась, то замыкающий его контакт РУ(верхний) – разомкнется, а размыкающий РУ(нижний) – замкнется и включит контактор КС3(последний подключает быстроходную обмотку статора).
Если при быстром переводе рукоятки командоконтроллера в третье положение выдержка времени реле РУ еще не закончилась, то несмотря на разомкнутый контакт К8 через замкнутый контакт К10 и замыкающий контакт РУ продолжает получать питание контактор скорости КС2 и тем самым двигатель продолжает работать на второй скорости. Это происходит в течение выдержки времени реле РУ, а после истечения выдержки времени замыкающими контактами РУ происходит отключение контактора КС2, а размыкающими контактами РУ происходит включение контактора КС3. Таким образом, при быстром переводе рукоятки командоконтроллера из нулевого в третье положение двигатель неизбежно работает на второй скорости и затем плавно переходит на третью. Этим обеспечивается его плавный пуск.
При положениях котроллера «Травить» вместо контактов К5,К11 замыкаются контакты К6 и К12 и, соответственно включится уже другой реверсивный контактор КН (Назад). В результате замыкания главных контактов КН фазы сети, подключаемые к соответствующим фазам двигателя, меняются местами, и двигатель имеет обратное направление вращения. Последующие включения аппаратуры аналогичное с положением «Выбирать».