

М инистерство
образования и науки Украины
инистерство
образования и науки Украины
Севастопольский национальный технический университет


МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторным работам по дисциплине
СУДОВЫЕ АВТОМАТИЗИРОВАННЫЕ
ЭЛЕКТРОПРИВОДЫ
для студентов и магистрантов специальностей
7.092201, 8.092201 – Электрические системы и
комплексы транспортных средств
7.092203, 8.092203 – Электрические системы автоматики
и электропривод
всех форм обучения
Севастополь
2012
УДК 629.12:62-83(075.8)
Методические указания к лабораторным работам по дисциплине «Судовые автоматизированные электроприводы» для студентов специальностей 7.092201,7.092203 и магистрантов специальностей 8.092201,8.092203 всех форм обучения/ Разраб. Пронина А.К.– Севастополь: Изд-во СевНТУ, 2012. - с.
Целью методических указаний является оказание помощи при выполнении лабораторных работ по дисциплине «Судовые автоматизированные приводы».
Методические указания рассмотрены и утверждены на заседании кафедры Судовых и промышленных электромеханических систем, протокол № от 2012г.
Допущено учебно-методическим центром СевНТУ в качестве методических указаний.
Рецензент: А.М.Олейников, д. т. н, профессор.
Содержание
Лабораторная работа №1. электроприводом судовых грузоподъемных устройств (грузоподъемная лебедка)
|
4 |
Лабораторная работа №2. Электропривод якорно-швартовных устройств (брашпиль)
|
13 |
Лабораторная работа №3. Электропривод якорно-швартовных устройств (шпиль)
|
23 |
Лабораторная работа №4 Релейно-контакторное управления якорным электроприводом с двухскоростным фазным асинхронным двигателем
|
31 |
Лабораторная работа №5 Бесконтактное управление электроприводом на основе тиристорных контакторов |
37 |
Лабораторная работа № 1
ЭЛЕКТРОПИВОД СУДОВЫХ ГРУЗОПОДЬЕМНЫХ
УСТРОЙСТВ
Цель работы
1. Ознакомление с основными требованиями к электроприводу судовых грузоподъёмных устройств.
2. Изучение работы релейно-контакторной схемы электропривода грузовой лебедки.
3. Ознакомление с правилами эксплуатации электропривода.
4. Приобретение навыков управления судовым электроприводом.
Теоретический раздел
 На
судах транспортного флота основные
погрузочно-разгрузочные работы
выполняются с помощью грузовых стрел,
обслуживающих лебедками или грузовыми
кранами.
На
судах транспортного флота основные
погрузочно-разгрузочные работы
выполняются с помощью грузовых стрел,
обслуживающих лебедками или грузовыми
кранами.
Грузовая лебедка – это механизм, обслуживающий грузовое устройство, которое предназначено для погрузки и разгрузки на рейдовой стоянке или у немеханизированного причала.
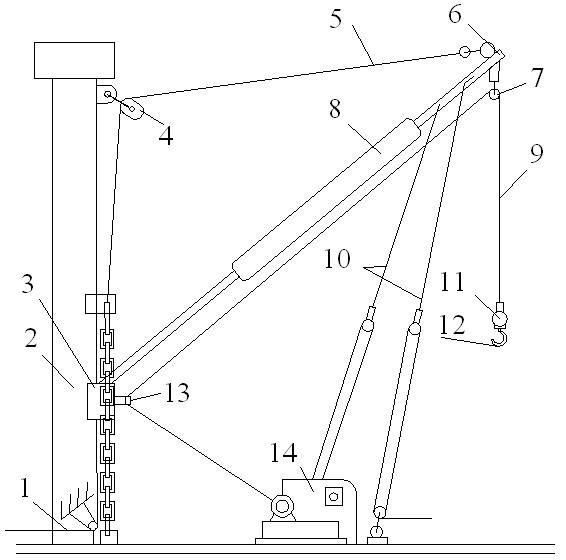
Традиционная оснастка судовой грузовой стрелы показана на рис.1. Шкентель (трос) 9 служит для вертикального перемещения груза, одним концом он закреплён на барабане лебёдки 14 и переброшен через отводной 13 и грузовой 7 блоки.
Рис.1 - Грузовая стрела и грузовая лебедка
На втором конце шкентеля крепится грузозахватное устройство, обычно гак 12. Топенант 5 одним концом прикреплён к ноку стрелы 6, а второй конец через топенантный блок 4 крепится к палубе, с помощью лопаря топенанта 1 стрела 8 может изменять вылет или удерживаться с различными заданными углами наклона. Нижний конец стрелы шарнирно закреплены подпятником 3 на мачте 2. Оттяжками 11 обеспечивается поворот стрелы вокруг вертикальной оси.
Кинематическая схема грузовой лебёдки представлена на рис.2.
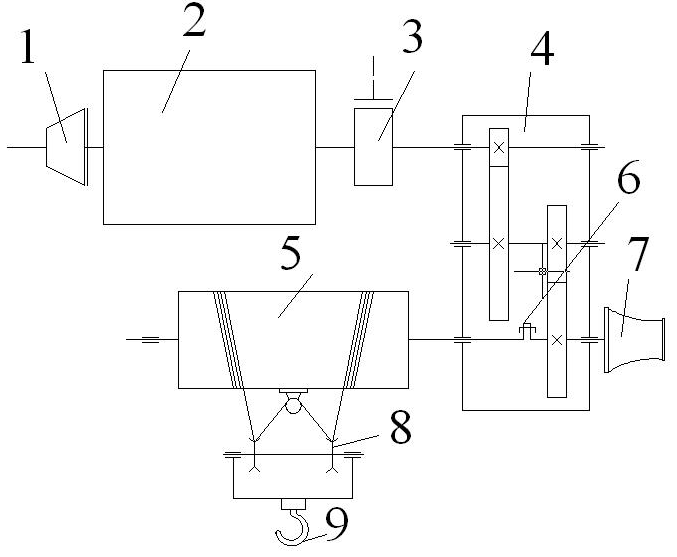
Рис.2
Электродвигатель 2, имеющий электромагнитный 1 и механический ленточный тормоз 3, соединён с цилиндрическим двухступенчатым, двухскоростным редуктором 4. Большие шестерни редуктора вращаются на валу свободно, причем передаточное число передачи от электродвигателя к этим шестерням разное. На выходном валу редуктора жестко закреплен турачек 7. Грузовой барабан 5 можно соединять и разъединять с валом редуктора муфтой 6, что позволяет работать турачком независимо от грузового барабана и их иногда используют во время швартовных операций. На грузовой барабан навит трос 8, который через блоки соединён с гаковой подвеской 9.
Исходя из напряженного режима работы электроприводов грузовых устройств и их влияния на технико-экономические показатели судна, для них могут быть сформулированы следующие основные требования:
работа в повторно-кратковременном режиме при частых пусках и торможениях;
изменение угловой скорости в широких пределах;
получения ступенчатого или плавного регулирования скоростей;
обеспечения высокого момента при пуске и эффективного торможения при остановке;
возможность плавного пуска и торможения;
осуществление пуска при полной нагрузке;
вращение в обоих направлениях;
реверса из любого рабочего положения, включая движения с определенной скоростью;
обеспечения надежного электрического торможения при спуске полного груза;
работа при переменных нагрузках, изменяющихся от холостого хода до полной, и перегрузках.
автоматическое стопорение (остановка) механизма движения при исчезновении электропитания;
и ряд других специальных требований (например, отключение конечными выключателями, защита от перегрузки и.т.п.).