

2.3. Понятие запаздывания объекта управления
Большинство
объектов и технологических процессов
обладают запаздыванием. Это значит, что
при подаче регулирующего воздействия
хз
(см. рис. 2.1) выходная величина у
появляется на выходе через какое-то
время
![]() ,
т.е.:
,
т.е.:
![]() .
.
Различают инерционное запаздывание и чистое (транспортное) запаздывание. Инерционное запаздывание связано с габаритами объекта (например, прогрев металлоемких конструкций), с пассивностью (например, некоторые химические реакции) и др. Чистое запаздывание связано с перемещением или прохождением какого-либо пути. Например, при прокатке металла сигнал о толщине листа прямо пропорционален пути, на котором от валков установлен датчик, и обратно пропорционален скорости прокатки. Транспортное запаздывание характерно также для роботов.
В общем случае
![]() , (2.2)
, (2.2)
где
![]() − время запаздывания (или просто
запаздывание) объекта;
− время запаздывания (или просто
запаздывание) объекта;
![]() и
и
![]() − инерционное и чистое время запаздывания
соответственно.
− инерционное и чистое время запаздывания
соответственно.
Объекты управления (процессы) с запаздыванием являются наиболее трудными с точки зрения управления. Трудности возрастают, если запаздывание объекта по каким-либо причинам изменяется.
2.4. Дискретизация времени
При исследовании блоков и систем во временной области на ЭВМ, в частности микроЭВМ, непрерывные процессы заменяются дискретными. При этом временной интервал t представляется как совокупность дискретных интервалов:
![]() (2.3)
(2.3)
где Tk — шаг приращения времени или период квантования по времени непрерывной функции f(t); n — количество шагов или квантов.
Количество квантов непрерывной функции y=f(t) выбирается не произвольно, а из условия восстановления ее по дискретным значениям, исходя из максимальной частоты процесса и допустимой погрешности при моделировании.
Это следует помнить. При изучении методики цифрового моделирования это не является принципиальным вопросом.
2.5. Требования к программе моделирования системами управления
Программа должна иметь модульный принцип построения. Это одно из требований современного программирования и структурного построения микроЭВМ и микропроцессорных систем. Принцип модульности ускоряет разработку и отладку микропроцессорных устройств, систем и средств моделирования. Этот принцип дает возможность использовать как ранее разработанные программные модули, так и более продуктивные новые разработки. Модульность является одним из семи основных особенностей архитектурно-структурного построения микроЭВМ и микропроцессорных систем.
Программа должна работать как в реальном времени, так и в машинном времени для ускорения процесса отладки.
Программные модули (типа PROCEDURE, FUNCTION или собственные модули UNIT), обеспечивающие принцип модульности, должны сопровождаться схемой алгоритма. В структуре программы перед программными модулями и основной программы должны быть комментарии функционального назначения.
Основная программа должна содержать обращения к подпрограммам.
2.6. Схема алгоритма основной программы
Для общего представления объема работы и облегчения задачи моделирования системы управления на рис.2.2. показана схема алгоритма основной программы. Приведенное ниже описание схемы алгоритма будет полезным для студентов при выполнении как курсовых работ, так и дипломной работы, в которых, как правило, приводятся схемы алгоритмов с описанием.
Схема алгоритма основной программы моделирования системы управления (регулирования) включает блоки 01 – 12. Блоки 01 и 12 соответственно Начало и Конец алгоритма. Блок 02 (ПП1 – ЧФ) служит для чтения файла исходных данных об объекте управления. Блок 03 (ПП2 – ЦФ) осуществляет цифровую фильтрацию (сглаживание) исходной информации с объекта управления. Блок 04 (ПП3 – И) служит для идентификации (определения параметров) объекта управления. Блок 05 (ПП4 – НУ) предназначен для задания начальных значений на выходах каждого блока системы управления в момент времени t = 0 и расчета параметров блока управления (регулятора), реализующего данный закон управления. Таким образом, блоки 02 – 05 выполняют подготовительные операции для расчета системы при моделировании.
Блоки 06 – 09 служат для расчета переходного процесса в системе управления. Блок 06 (ПП5 – Т) – это таймер, способный работать либо в реальном времени, либо в темпе работы компьютера (микропроцессорного блока). Блок 07 (ПП6 – З) запускается по временным меткам таймера и используется для реализации запаздывания объекта управления. Запаздывающие сигналы далее поступают в блок 08 (ПП7 – РС), который осуществляет расчет системы по различным уравнениям. Блок 09 анализирует окончание переходного процесса. Если переходный процесс не окончен, то блок 09 передает управление подпрограмме 06, а его окончание управления передается блоку 10.
Блок 10 представляет подпрограмму вывода исходных данных и расчетных параметров (ПП8 – ИР). Эта подпрограмма выводит исходные данные (массив ai), сглаженные данные (массив уi), параметры объекта управления ( k0, tau, T0) и расчетные параметры регулятора (kr, ti), а также дискретные значения переходного процесса на выходе объекта управления и сравниваемого элемента в замкнутой системе.
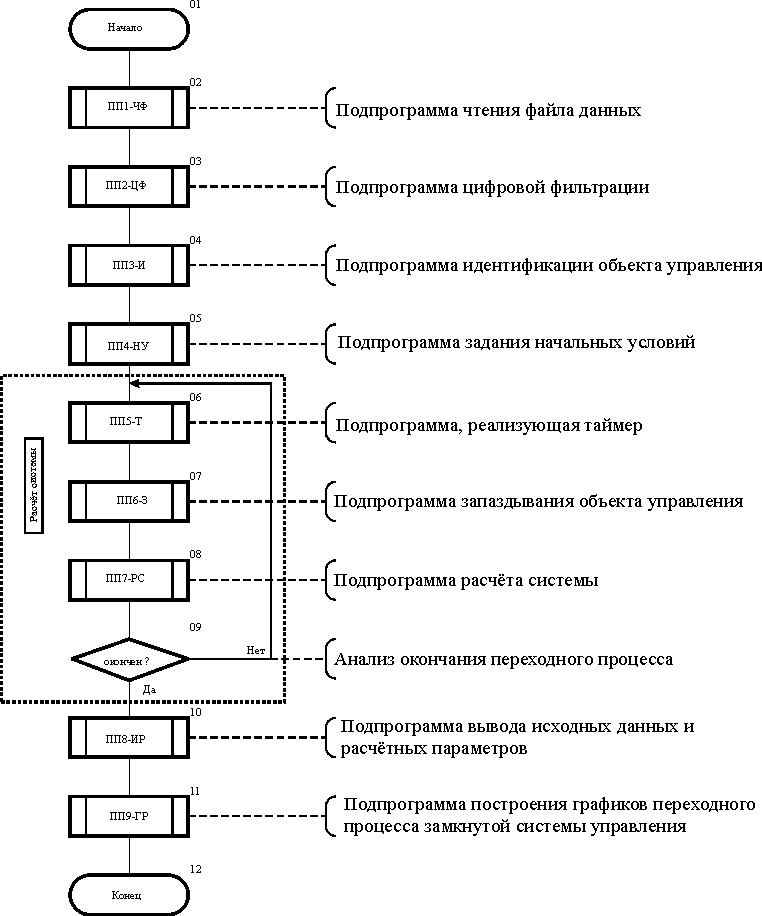

Рис. 2.2. Схема алгоритма основной программы моделирования АСР
Затем по результатам блока 10 подпрограмма ПП9 – ГР (блок 11) строит графики переходного процесса, на основании которых делается вывод о работоспособности и качестве системы управления. Таким образом, моделируя систему управления, разработчик может провести исследование поведения системы при различных параметрах объекта управления и регулятора без аппаратной реализации.