

1.5. Временная переходная характеристика объекта управления
Временная переходная характеристика наглядно демонстрирует динамику узла, блока или объекта управления.
Если задана передаточная функция вида (1.4), то временная переходная функция объекта управления при единичном скачкообразном входном воздействии имеет вид, характерный для апериодического звена 1-го порядка с запаздыванием
Графики переходного процесса такого вида функции показаны на рис. 1.2.
Из графиков видно, что поведение блока можно описать выражением:
![]() (1.7)
(1.7)
Окончание
переходного процесса (теоретическое)
имеет место при
![]() .
.
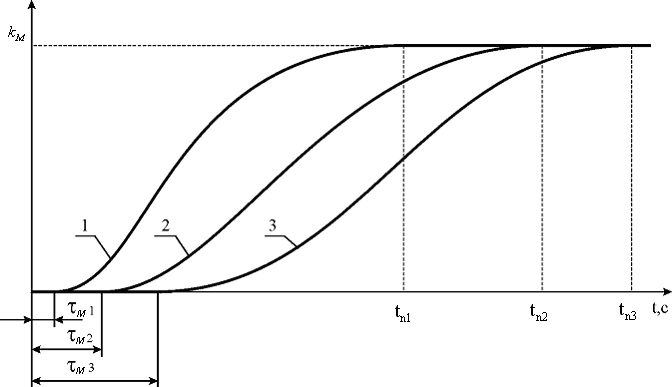
Рис. 1.2 Графики переходных процессов,
где 1, 2, 3, − графики
при kM=const
при различных
![]() и
и
![]() и времени переходного процесса
и времени переходного процесса
![]() ,
,
![]() и
и
![]() .
.
Практически
можно считать, что время переходного
процесса
![]() определяется выражением:
определяется выражением:
![]() , (1.8)
, (1.8)
т.е. переходный процесс заканчивается, когда выходная величина достигает 0,98 установившегося значения.
Функция
![]() (1.9)
(1.9)
называется нормированной, так как приведена к единице путем деления функции переходного процесса y(t) на коэффициент усиления модели . Именно такая функция используется при расчетах и проведении сравнительных исследований.
2. Выбор метода метематического моделирования системы управления
2.1. Разностные уравнения и рекуррентные формулы
В основу метода математического моделирования положены хорошо известные студентам младших курсов разностные уравнения.
Разностное уравнение − это средство описания динамики блока или системы. Оно имеет решение, описываемое дискретными функциями, областью которых являются действительные числа.
Разностные уравнения могут записываться в виде бесконечных рядов (рекурсивные фильтры) и конечных рядов (нерекурсивные фильтры).
Рекуррентные
формулы
применяются
как при описании непрерывных, так и
дискретных процессов. Рекуррентная
формула для дискретных процессов
позволяет вычислять новое число в n-й
момент времени (пТk)
на базе текущего (в n-й
момент) и предыдущего значений чисел
(в (n-1)-й
момент), где Тk
-
время квантования функции
![]() .
.
Рекуррентные формулы позволяют упрощать вычисления последовательности чисел и экономить память микроЭВМ.
2.2. Суть предлагаемого метода математического моделирования
Предлагаемый метод математического моделирования путем програм-мирования структурных схем состоит в следующем.
1.
Схема управления представляется в виде
элементарных блоков и звеньев, которые
описываются определенными передаточными
функциями в операторной форме
![]() .
После выполнения этого требования
система управления для моделирования
будет иметь вид, показанный на рис. 2.1.
.
После выполнения этого требования
система управления для моделирования
будет иметь вид, показанный на рис. 2.1.
2.
Используя обратное преобразование
Лапласа или справочные таблицы,
определяются выходные временные функции
блоков и звеньев
![]() ,
характеризующие реакции каждого блока
на единичное скачкообразное возмущение.
,
характеризующие реакции каждого блока
на единичное скачкообразное возмущение.
3.
Осуществляется переход к разностным
уравнениям блоков и узлов
![]() в виде рекурентных формул, решение
которых является, как правило, хорошей
аппроксимацией реакции дифференциальных
уравнений на произвольное возмущающее
воздействие (при правильно выбранном
значении времени квантования
в виде рекурентных формул, решение
которых является, как правило, хорошей
аппроксимацией реакции дифференциальных
уравнений на произвольное возмущающее
воздействие (при правильно выбранном
значении времени квантования
![]() ).
).
4. Разрабатывается алгоритм вычисления дискретных значений сигнала в любой точке системы путем движения по замкнутому контуру системы. Точка А - это рекомендуемая начальная точка обхода системы.
5. Формируются условия условных переходов (окончания процесса вычислений, повторений и т.д.). Условие окончания переходного процесса для системы управления, показанной на рис. 2.1:
![]() , (2)
, (2)
где
![]() постоянная времени и время запаздывания
модели объекта управления соответственно.
постоянная времени и время запаздывания
модели объекта управления соответственно.
6. При подаче возмущений, отличных от единичных, для линейных систем используется принцип суперпозиции.
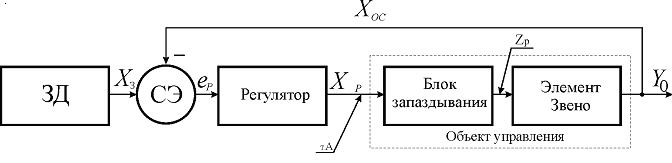
Рис. 2.1 Вид системы управления для моделирования
Согласно этому методу, если известно разностные уравнение в рекуррентном виде Zn-1 и входной сигнал Хn, то значение на выходе узла вычисляется довольно просто:
yn = Zn-1 Хn . (2.1)
Формулой (2.1) нельзя воспользоваться для блока запаздывания (рис.2.1),
программирование которого имеет специфику. Реализация блока запаздывания приводится в последующем материале.