

42.4.7 Sonet and sdh
Several mentions have been made of SONET as being both the forerunner and the North American equivalent of SDH. The SONET standards were designed around the need for efficient transport of the existing North American PDH rates, the most important of which are the 1.5Mbit/s and 45Mbit/s rates. This leads to a standard where a 45Mbit/s signal is loaded into the equivalent of a VC3, which, in turn, is loaded into the SONET counterpart of an STM, known as a Synchronous Transport Signal - I (STS-1), which runs at 51,84Mbit/s i.e. precisely one third of the STM-1 rate. As with SDH, there is also a concatenation mechanism for dealing with customer signals which do not easily lit inside any of the already defined VCpayload areas. This mechanism is particularly useful for carrying rates such as 140Mbit/s, where the concatenation results in a SONET NNI signal known as an STS-3c, which has a bit rate that is identical to an STM-1, and an SOH and payload area of exactly the same size as well.
Other terminology within SONET is also different, in that SONET refers to Virtual Tributaries (VTs) rather than VTs, and the equivalent of the VC3, referred to above, is known as a Synchronous Payload Envelope (SPE). It also makes a distinction between the STS logical signal and its optical manifestation at an NNI, in which case it is referred to as an Optical Carrier (OC). North American transmission systems are usually referred to by their transmission rates in OCs e.g. OC3 or OC48.
42.4.8 Nni Optical Interface standardisation
Although recommendations G.707/8/9 have done an excellent job in standardising the logical signal presented at an NNI, this alone is not enough to ensure a Mid-Fibre Meet between equipment from two different manufacturers. G.957 recognises this problem and specifies the relevant physical parameters for a range of standard optical interfaces, at the preferred SDH rates of STM-1, STM-4 and STM-16. In addition, there is also an extension to the existing G.703 electrical interlace specification to accommodate an electrical presentation of an STM-1 signal Despite this, there is still no guarantee of anything beyond traffic path interworking, as the management channels that flow across the mid-fibre boundary may still be carrying information which is unintelligible to the network managers on the other side. This is an important area that the standards bodies are still addressing
42.4.9 Sdh network elements
Because traffic touting flexibility is one of the reasons for the existence of SDH, the simplest way of considering any SDH network element is as a group of transport termination functions (TTFs) surrounding a traffic path connectivity function (see figure 42.21) The TTFs are essentially the conversion functions from the VC level to either the STM or plesiochronous signal levels, while the connectivity function allows VCs to be routed between the various TTFs. More than anything else, it is the size and flexibility of the connectivity function that distinguishes one type of network element from another. For example, a crossconnect may have a large connectivity function, capable of simultaneously routing a large number of VCs of a given type between a large number of TTFs, with very few restrictions on this connectivity. This, of course, is consistent with the normal role of a crossconnect, as a major traffic routing node in a transport network, where electronically control-table traffic routing flexibility is its raison d'etre. At the other end of the scale come Line System Terminals (LTEs), which normally incorporate a multiplexer as well. The connectivity between tributaries and aggregate ports of such a multiplexer is normally hard wired, hence no flexibility whatsoever. Between these two extremes come drop and insert (Add/Drop) multiplexers, which attempt to strike a balance, that leads to adequate, rather than comprehensive routing flexibility, with an attendant reduction in equipment costs.
All of the above mentioned types of network element normally assume that any interconnection will be based on optical fibres. It is, however, also possible to use other interconnection media, in particular radio transmission. The problem in using radio interconnection is that, unlike optical fibres, the available spectrum is finite, and in short supply. The liberal use of overhead capacity in SDH only exacerbates the already difficult problem of squeezing the traffic information into the existing arrangement of radio channel bandwidths. These problems are by no means insuperable, but they do tend to restrict radio interconnection of NNI signals to the lower end of the SDH range e.g. up to STM-2 at present. This inability to match the transmission capacity of optical fibres will progressively force radio based systems out of the core areas of transmission networks, and into the more peripheral areas. In particular, it is likely that radio based SDH equipment will be heavily used for access duties
The reduction in cost that accompanies a network element with restricted connectivity results not only from simpler hardware, but also from simpler control software. This is somewhat surprising at first sight, as it has often been said that SDH does not really make economic sense without a large measure of software control over all the network element functionality and, in particular, that of routing flexibility. However, the complexity of even relatively simple SDH network elements leads to a situation where control of complete networks rapidly escalates unless some restrictions are put on the traffic routing complexity. In short, every additional piece of traffic routing flexibility is a potential network control headache.
The general problem of control of a whole SDH network, notwithstanding the traffic routing problem, is almost impossible if it is composed of network elements from different manufacturers, which do not have some form of common control interface. Before we can arrive at such a universal interface, we must first standardise, to a large extent, on the functions which each of the network elements actually perform. This is where the network element functional standards, CCITT G.781/2/3, come in. These are the recommendations which describe how the functionality of a network element can be decomposed into the basic 'atomic' elements of functionality, together with how such atomic functions may be combined and thereafter exchange both traffic and control information. (See Figure 42.22.)
The rules for combination of these atomic functions enable a variety of network elements to he synthesised, with differing traffic capacities and routing capabilities. Indeed, one of the current problems is the potentially large number of different ways a conformant network element can be constructed. It is rather difficult for software based control systems to cope with this variety and hence there are efforts in several standards fora (notably ETSI), to standardise on a more restricted range of network element functionalities. G.781/2/3 were created primarily to describe different types of drop and insert multiplexers, however, the general principles and indeed, much of the detail, are just as applicable to LTEs and large cross connects. Moreover, the formalism required to describe complete SDH networks was produced very much with this same functional decomposition in mind. We shall see, later, how these atomic functions may be paired between network elements on opposite sides of a network to produce a complete traffic path, that is sufficiently well defined for a computer to recognise.
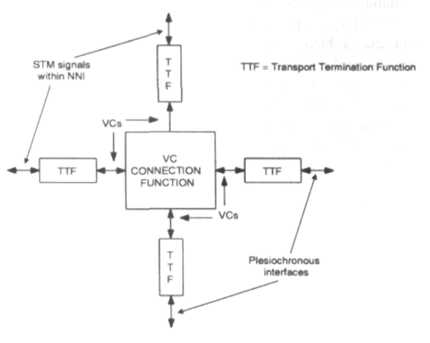
Figure 42.21 Generalised representation of the traffic paths through an SDH network element
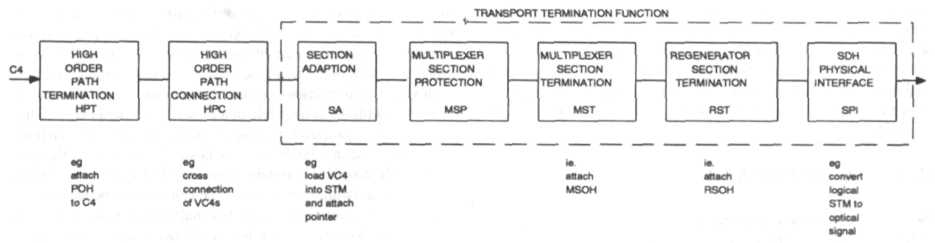
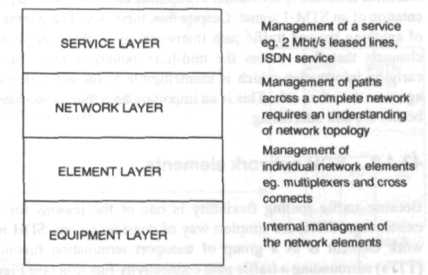
Figure 42.23 Network management layering for the control of telecoms networks and services
1. Learn the following technical words and word-combinations:
42.4.6
1. |
mapping |
преобразование (данных из одной формы в другую) |
2. |
transmission bandwidth |
ширина полосы пропускания |
3. |
payload capacity |
полезная пропускная способность |
4. |
concatenation |
связь, соединение, каскад, цепь |
5. |
service rate signal |
служебный сигнал, пропорциональный скорости |
42.4.9
6. |
connectivity |
связность |
7. |
interconnection |
межсоединение |
8. |
squeezing |
сжатие, уплотнение |
9. |
access duty |
режим доступа |
10. |
network element |
элемент (звено) сети |
Exercise 2 Read the text 42.4.6- 42.4.9.
Exercise 3 Find the Russian equivalents for the following English technical word-combinations:
1. |
the common plesiochronous bit rates |
|
2. |
the SDH network element |
|
3. |
to endow SDH with a second class of mapping |
|
4. |
the only byte synchronous mapping |
|
5. |
the incoming G.704 frame alignment word |
|
6. |
a Synchronous Transport Signal |
|
7. |
a concatenation mechanism |
|
8. |
Virtual Tributaries |
|
9. |
a Synchronous Payload Envelope |
|
10. |
the mid-fiber boundary |
|
11. |
transport termination function |
|
12. |
a major traffic routing node |
|
13. |
radio based SDH equipment |
|
14. |
common control interface |
|
15. |
a universal interface |
|
16. |
the basic “atomic” elements of functionality |
|
Exercise 4
Find the English equivalents for the following Russian technical word-combinations:
1. |
степень неэффективности |
|
2. |
видимость и маршрутизация каналов |
|
3. |
процесс выравнивания цикла |
|
4. |
связанная группа |
|
5. |
предшественник SDH |
|
6. |
гибкость маршрутизации трафика |
|
7. |
функция связности |
|
8. |
совершать постепенное восхождение |
|
9. |
непреодолимый |
|
10. |
завершенные SDH сети |
|
11. |
линейные системные терминалы |
|
12. |
оптические волокна |
|
13. |
функциональные возможности элемента (звена) цепи |
|
Exercise 5
Answer the following questions:
1.How have mappings into Synchronous Containers been defined so far?
2.What do CCITT G.708 and G.709 contain?
3.What signal is the only byte synchronous mapping defined for?
4.What is the advantage of the byte synchronous mapping? When does this mapping become apparent?
5.What were the SONET standards designed for? What new standard appeared later?
6.What other terminology exists within SONET?
7.What does the recommendation G.957 specify?
8.Why is there no guarantee of anything beyond traffic path interworking?
9.What is the simplest way of considering any SDH network element?
10.Is the size and flexibility of the connectivity function of great importance for distinguishing one type of network element from another?
11.Why is it likely that radio based SDH equipment will be used for access duties? Why?
12.Under what conditions is it impossible to control a whole SDH network?
Exercise 6
Make a short report on SDH network element (part 42.4.9).
Exercise 7
a) Translate into Russian in writing part 42.4.9 paragraph 1.
b) Translate into Russian in writing part 42.4.9 paragraphs 2 (up to “The reduction in cost…”).
Part 5 (42.5- 42.6)
5. Control and management
1. SDH based networks