

2.7.1. Аперіодичний перехідною процес з мінімальним часом регулювання (див. Мал. 2.7).
Цей типовий процес припускає, що відпрацьовується збурення Z (система автоматичної стабілізації).
В даному випадку налаштування регулятора підбираються так, щоб час регулювання tp був
мінімальним.
Даний тип перехідного процесу широко використовується для налаштування систем, що не допускають
коливань в замкнутій системі регулювання.
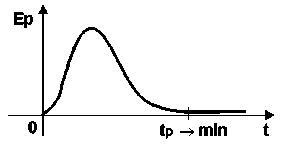
Малюнок 2.7 - Графік аперіодичного перехідного процесу
де Ер - помилка регулювання, t - час.
2.7.2. Перехідний процес з 20%-ним перерегулюванням і мінімальним часом першого
напівперіоду (див. мал. 2.8).
Такий процес найширше застосовується для налаштування більшості промислових САР, оскільки
він сполучає в собі достатньо високу швидкодію t1=min при тій, що обмеженій коливає у = 20%.
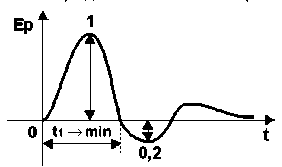
Малюнок 2.8 - Графік перехідного процесу з 20%-вим перерегулюванням
де Ер - помилка регулювання, t - час.
2.7.3 Перехідний процес, що забезпечує мінімум інтегрального критерію якості (див.
мал.2.9).
Інтегральний критерій якості виражається формулою:
∞
Jmin = ∫ Ep2(t)dt ??min (2.18)
0
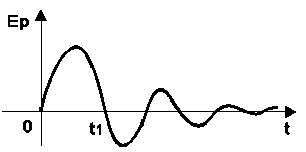
де Ер - помилка регулювання, t - час.
До переваг цього процесу можна віднести високу швидкодію (1-ої півхвилі)
досить значної коливає. Окрім цього, оптимізація цього критерію по параметрах налаштування
регулятора може бути виконана аналітично, чисельно (на ЕОМ) або шляхом моделювання (на ЕОМ).
Процес, що забезпечує мінімум інтегрального критерію якості, широко застосовується при
налаштуванню систем регулювання величини ph - що характеризує кислотність розчину.
Для кожного з трьох видів оптимальних процесів розроблені відповідні
формули і номограми для настроювання регуляторів на даний процес.
2.8 Коефіцієнти передачі елементів і блоків сар
Основними елементами САР є: автоматичний регулятор АР, виконавчий механізм ВМ, об'єкт управління ОУ, датчик Д з перетворювачем НП. Динаміка такої системи багато в чому визначається добутком статичних коефіцієнтів підсилення цих елементів:
КОБЩ = КАР * КИМ * КОУ * КД * КНП (2.19)
При розрахунку динаміки використовуються як розмірні, так і безрозмірні коефіцієнти передач. Приклад, об’єкт управління - нагрівальна піч, структурна схема приведена на мал. 2.10:
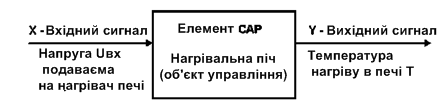
Малюнок 2.10 – Об’єкт управління - нагрівальна піч
2.8.1 Розмірні коефіцієнти передачі
Розмірні коефіцієнти передач в припущенні лінійності статичної характеристики визначаються таким чином:
![]() (2.20)
(2.20)
де ДХ, ДУ - прирости вхідного і вихідного сигналів в околиці точки його номінального режиму роботи.
Якщо шкала елементу лінійна, то:
![]() (2.21)
(2.21)
де Хmax, Хmin, Уmax, Уmin - максимальні і мінімальні значення вхідного і вихідного сигналів елементу.