

Создание программы пид-регулятора.
Для того чтоб создать блок ПИД-регулятора необходимо загрузить библиотеку Util.lib (библиотеки CoDeSys), нажав кнопку «Ресурсы», расположенную справа внизу окна. Выбрать «Менеджер библиотек» и нажать дважды левой клавишей манипулятора «мышь» (рис. 11).
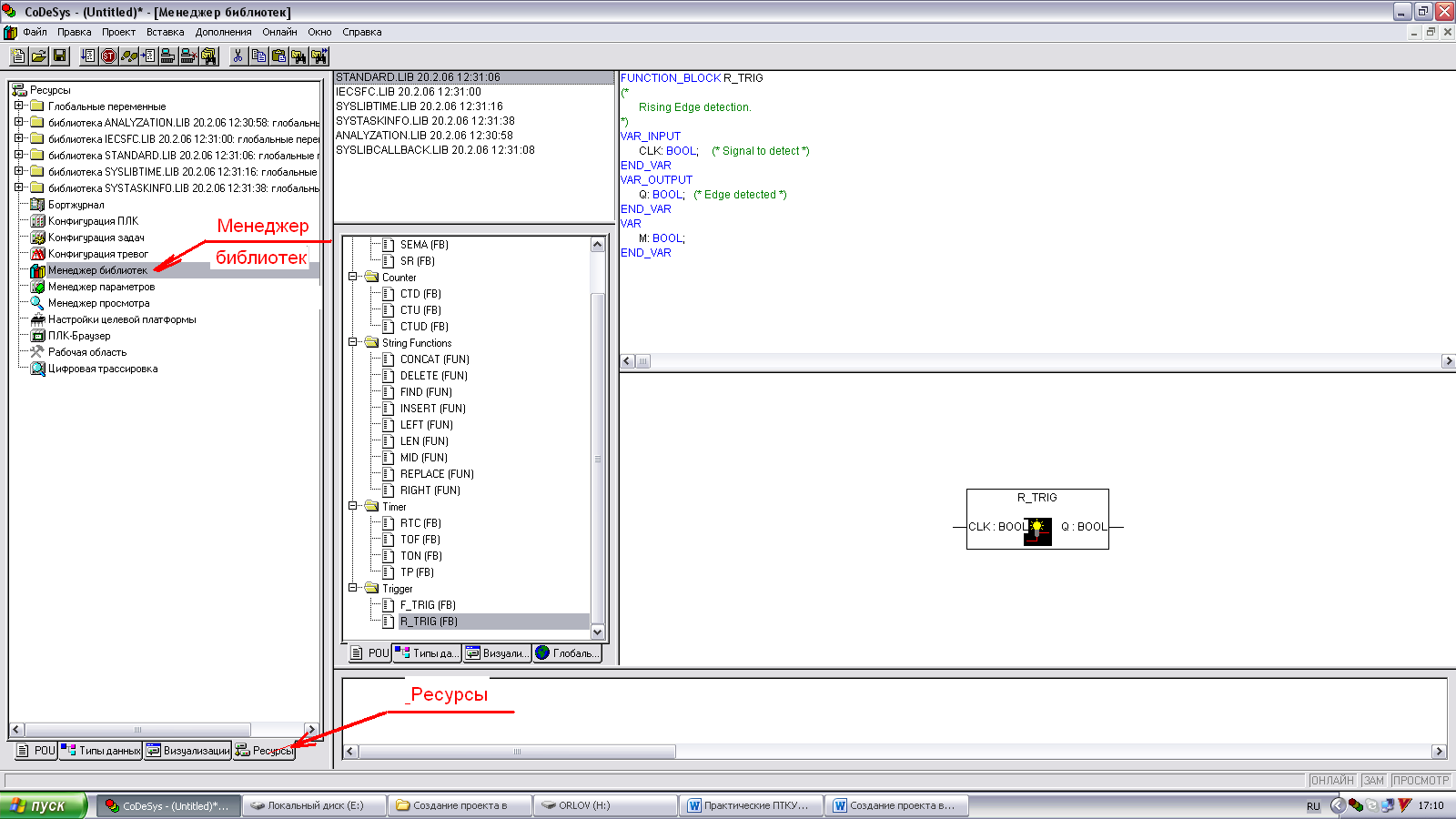
Рис. 11
Далее в панели «Меню» нажать «Вставка» и в появившемся окне выделить «Добавить библиотеку…Ins» (рис. 12).
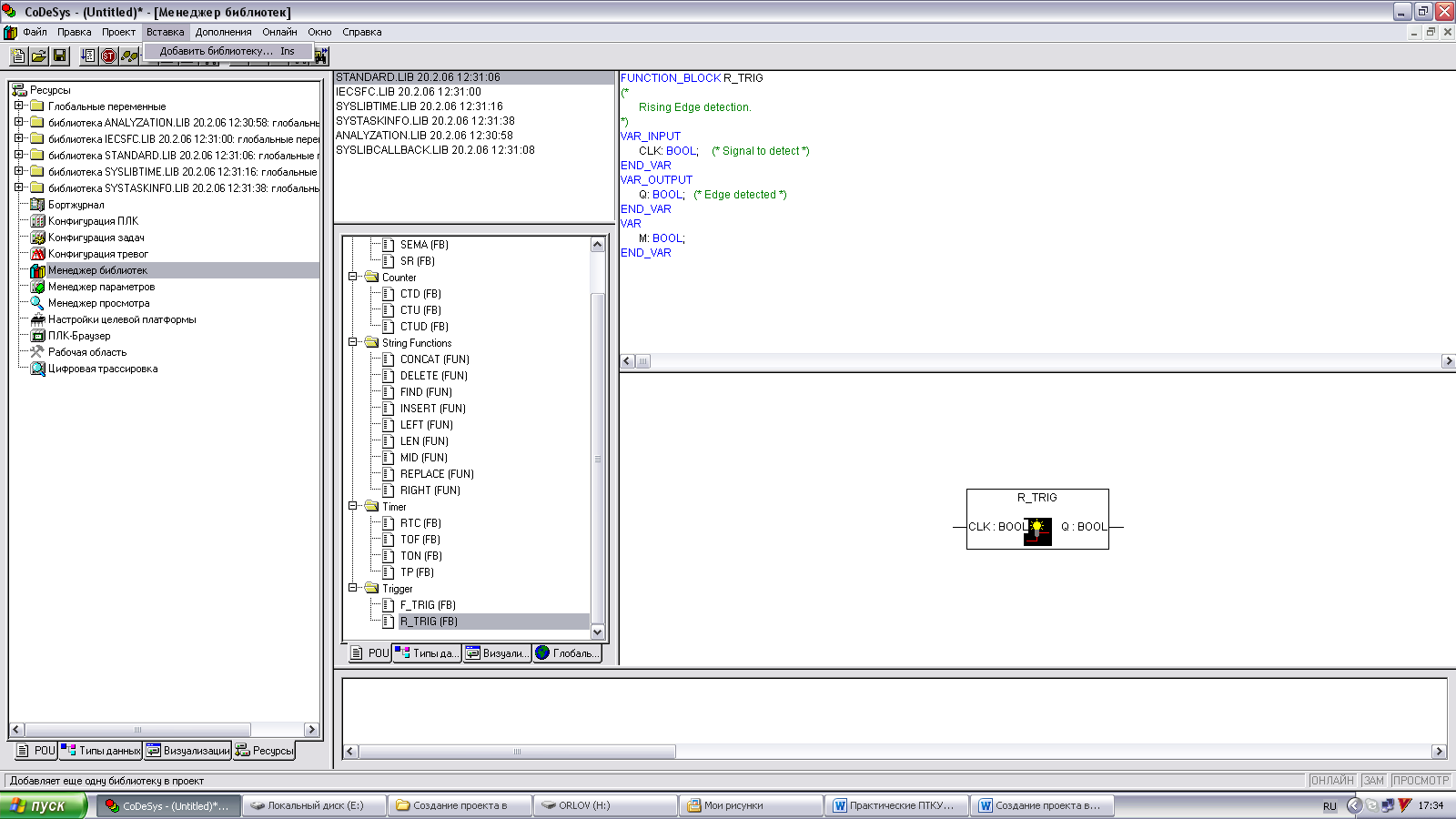
Рис. 12
Появится окно «Открыть»с папкой «Library» (библиотеки CoDeSys), в которой необходимо выбирать необходимую библиотеку показанную на рисунке 13 и нажать кнопку «Открыть».
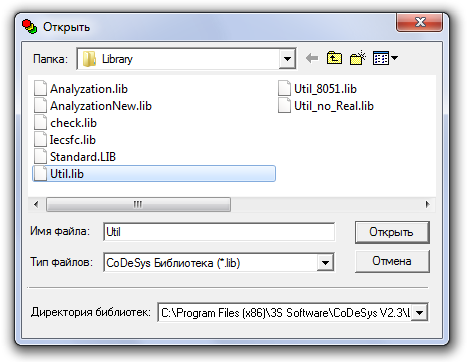
Рис. 13
Выбранная библиотека добавляется в список библиотек, с которыми можно работать.
После загрузки библиотеки выбираем и выделяем необходимый функциональный блок ПИД-регулятор - PID (FB) и копируем его название с помощью комбинации клавиш Ctrl+C (рис.14).
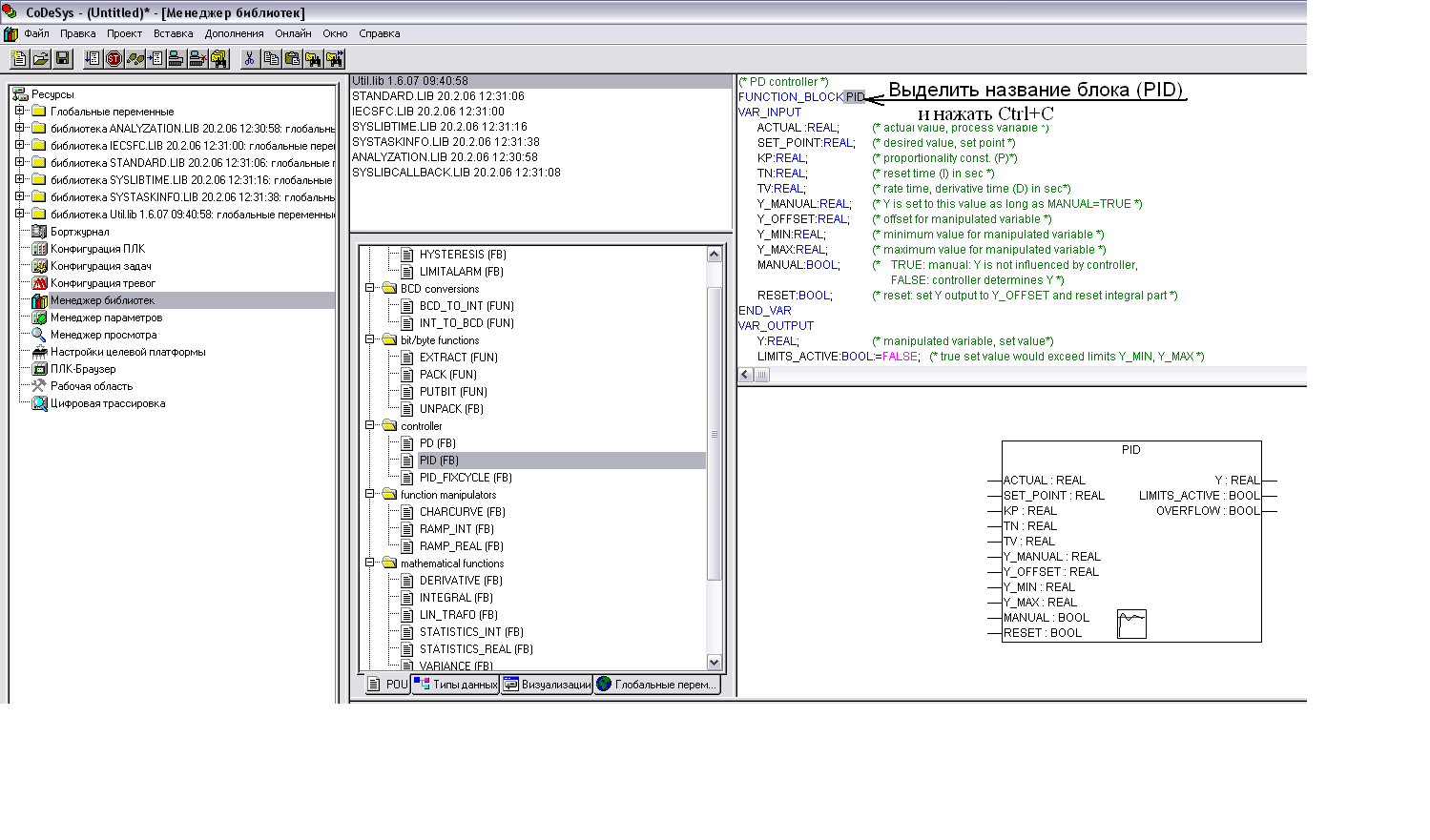
Рис. 14
Открываем рабочую область, в которой пишется программа с помощью нажатия на вкладку POU и дважды щёлкаем левой клавишей манипулятора мышь на PLC_PRG(PRG) (рис.15).
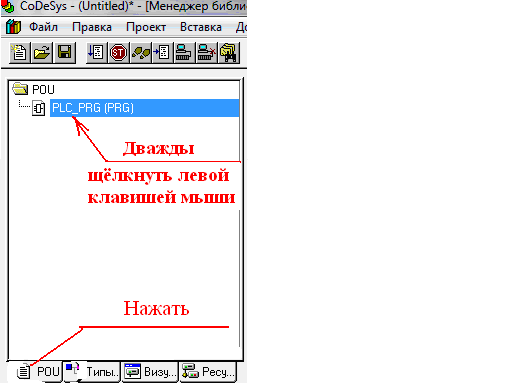
Рис.15
В появившемся окне вставляем «Элемент» путём нажатия на кнопку «Элемент», расположенной на панели инструментов или на клавиатуре клавиш <Ctrl> + <B>, при этом появляется элемент с именем «AND» (рис. 16).
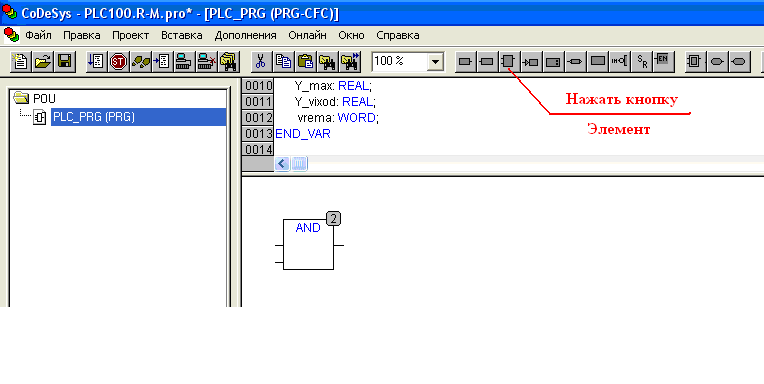
Рис. 16
Выделив текстовое поле внутри этого элемента, изменяем имя «AND» на имя «PID» нажатием комбинации клавиш Ctrl+V. Появляется блок пропорционально – интегрально –дифференциального регулятора «PID» (рис. 17).
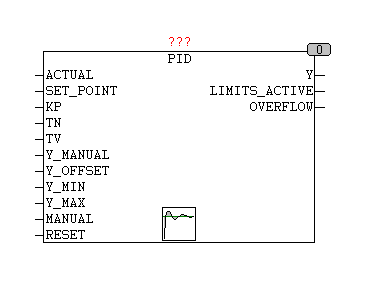
Рис. 17
Теперь необходимо дать название функциональному блоку, например: PID. Название пишется только на английском языке на месте 3-х вопросительных знаков над блоком. После того, как прописали имя, нажмите клавишу «Enter» и в появившемся окне нажмите ОК (рис. 18).
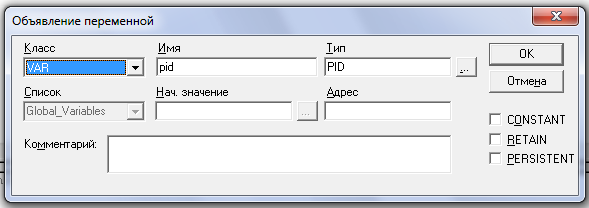
Рис. 18
Добавляем входы и выходы ФБ PID-регулятора, нажимая кнопки «Вход» или «Выход» и устанавливая их на соответствующие места регулятора, в результате появится блок, представленный на рисунке 19.
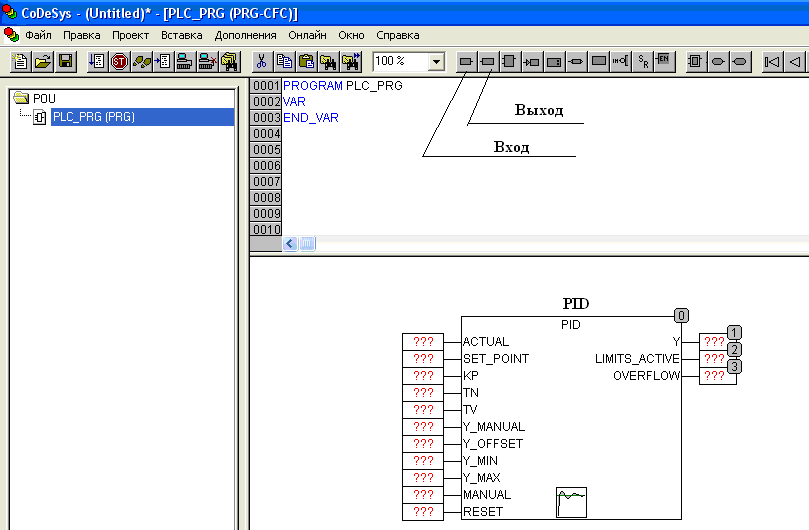
Рис. 19
В текстовом поле входа и выхода появятся три знака вопроса, которые нужно заменить на имя переменной, написанное на английском языке. Вводим обозначения входных сигналов:
Вход
Actual
–
обозначаем – pv,
для чего выделяем три вопроса, вводим
принятое обозначение и нажимаем клавишу
Enter.
Появляется окно «Объявление
переменной»,
где надо нажать на клавишу
![]() для изменения типа
переменной
(рис.20).
для изменения типа
переменной
(рис.20).
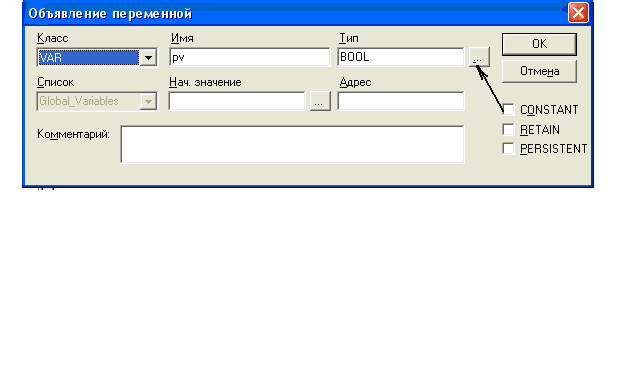
Рис. 20
Назначение и тип входных и выходных параметров регулятора представлено в таблице №1
Таблица №1
Наименование |
Тип |
Описание |
ACTUAL |
REAL |
Текущее значение контролируемой переменной.
|
SET_POINT |
REAL |
Задание. |
KP |
REAL |
Коэффициент передачи. |
TN |
REAL |
Постоянная интегрирования, в секундах (т.е. "0.5" для 500 мс). |
TV |
REAL |
Постоянная дифференцирования, в секундах (т.е. "0.5" для 500 мс). |
Y_MANUAL |
REAL |
Определяет значение выхода Y, если MANUAL = TRUE. |
Y_OFFSET |
REAL |
Стационарное значение Y. |
Y_MIN, Y_MAX |
REAL |
Значение выхода Y ограничено Y_MIN и Y_MAX. При достижении Y границ ограничения, выход LIMITS_ACTVE, (BOOL) принимает значение TRUE. Ограничение работает только при Y_MIN < Y_MAX. |
MANUAL |
BOOL |
Значение TRUE, включает режим ручного регулирования по входу Y_MANUAL. |
RESET |
BOOL |
TRUE сбрасывает регулятор; в это время Y = Y_OFFSET |
Появится окно «Ассистент ввода», где необходимо выбрать тип переменной, который должен соответствовать типу, указанному в таблице №1. Так, вход Actual должен иметь тип «REAL». Поэтому выбираем данный тип в окне «Ассистент ввода» и нажимаем кнопку «ОК» (Рис. 21).
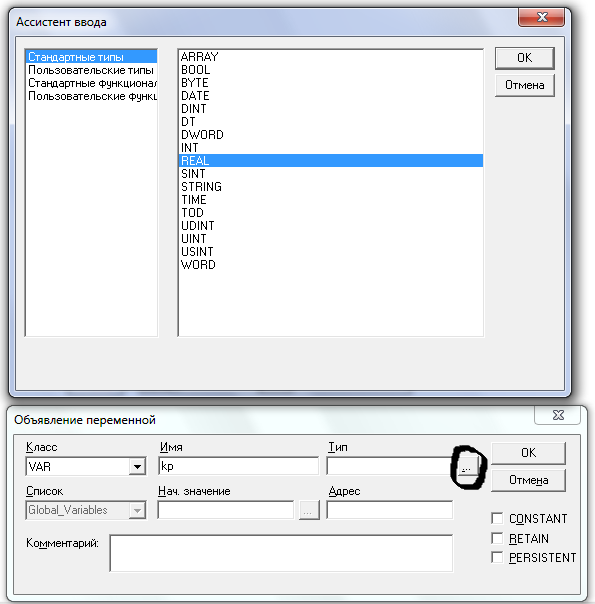
Рис. 21
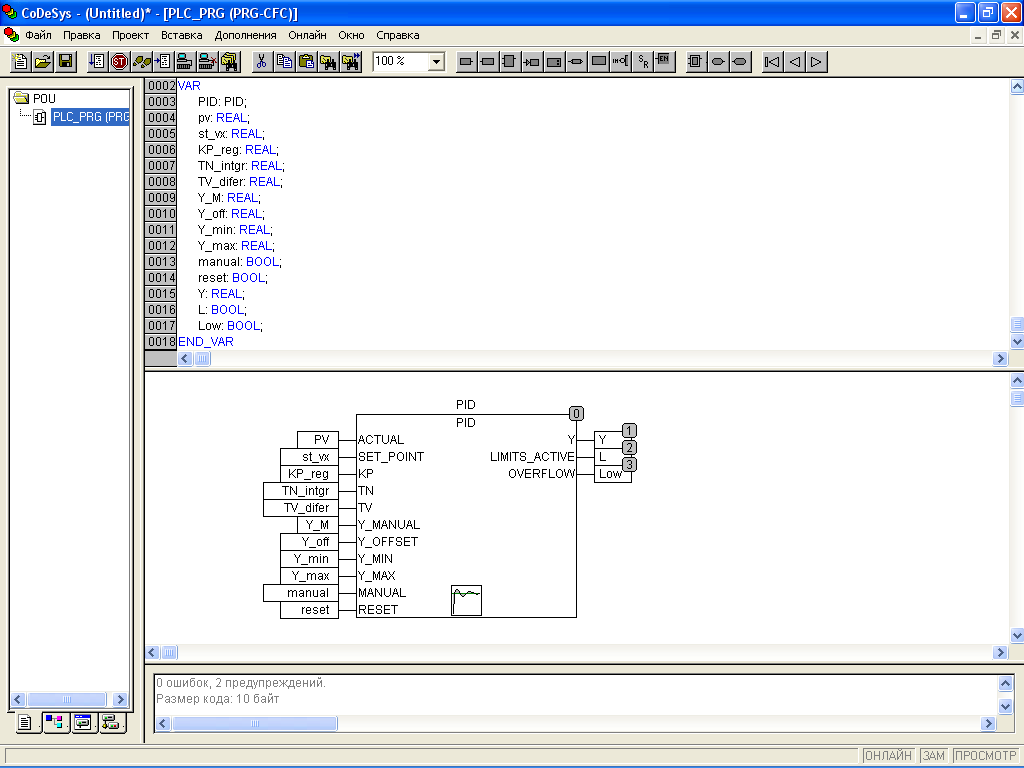
Аналогично вводим остальные обозначения входных и выходных сигналов регулятора «PID». В результате получим регулятор, представленный на рисунке 22.
Для проверки правильности выполненной работы необходимо произвести компиляцию созданного проекта (Компиляция - процесс получения готовых для загрузки в контроллеры алгоритмов).
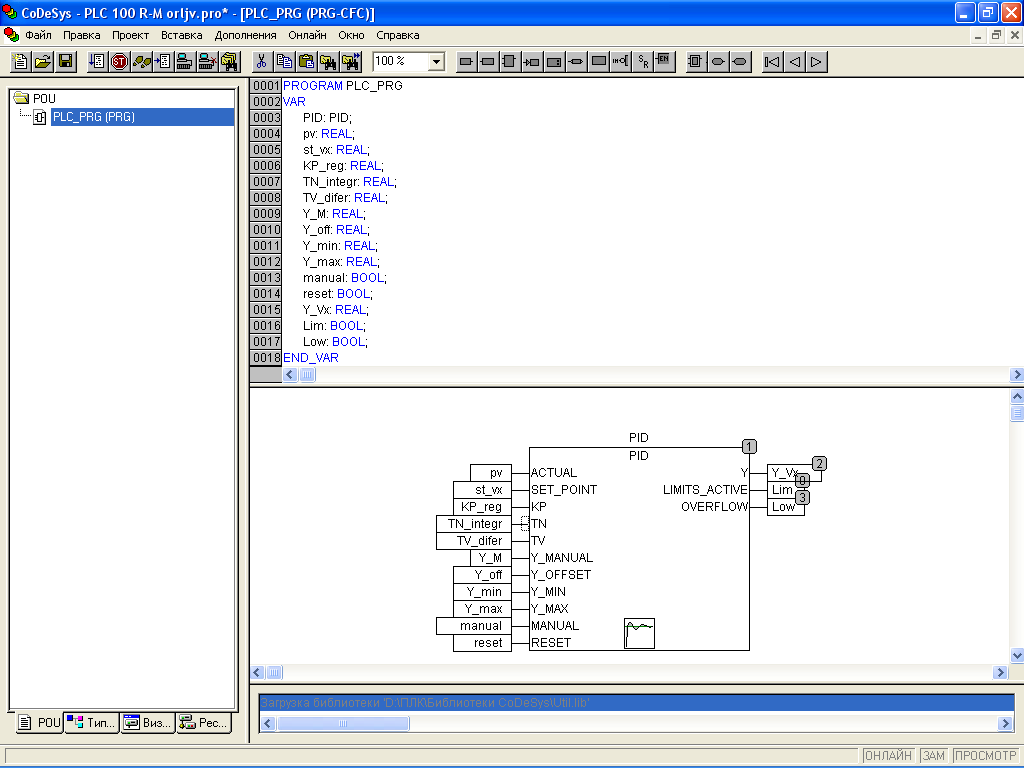
Рис. 22
Для компиляции проекта необходимо выбрать в панели меню «Проект» и в открывшемся списке нажать левой клавишей манипулятора «мышь» Компилировать (рис. 23).
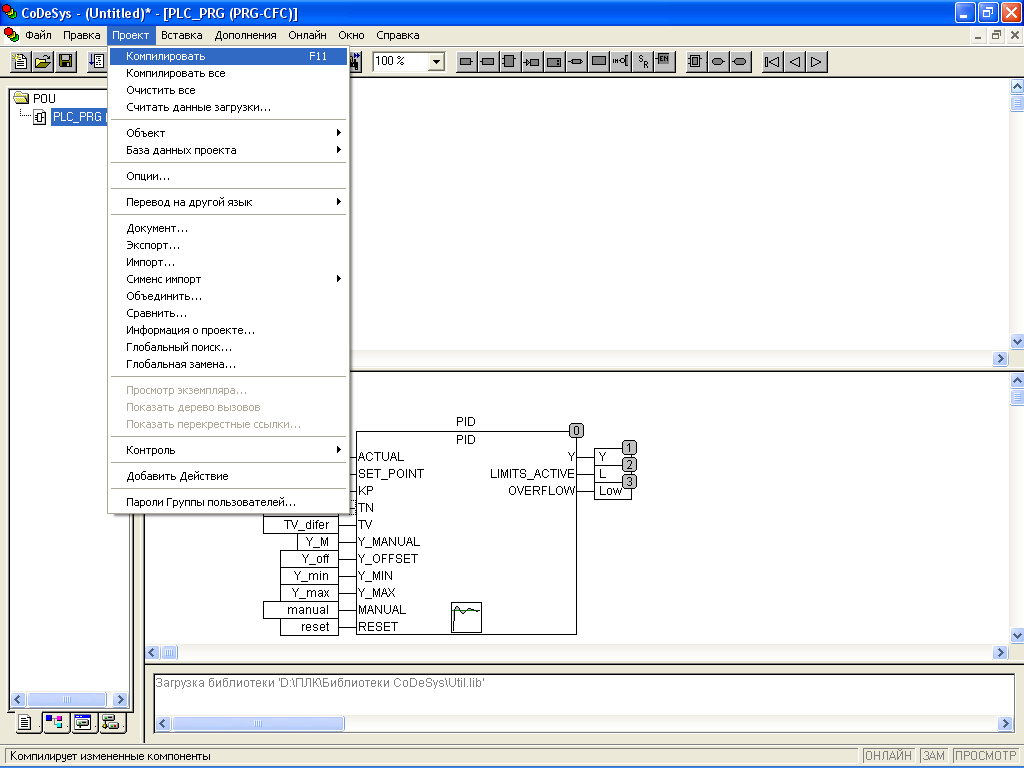
Рис. 23
В случае правильности выполненной работы можно приступить к проверке работы регулятора в «Режиме эмуляции». Для этого надо выбрать в панели меню «Онлайн» и в появившемся списке выбрать «Режим эмуляции»
Для запуска,
разработанного проекта ПИД регулятора
надо выбрать
в панели Меню
клавишу
 «Подключение»
и нажать на клавиатуре F5.
Задавая
значения параметров: ACTUAL;
SET_POINT; KP; TN и TV необходимо исследовать
значения выходного сигнала Y
«Подключение»
и нажать на клавиатуре F5.
Задавая
значения параметров: ACTUAL;
SET_POINT; KP; TN и TV необходимо исследовать
значения выходного сигнала Y