

3.2. Динамический синтез кулачковых механизмов.
Задачей динамического
синтеза в данном случае является
определение такого минимального
радиус-вектора профиля кулачка
![]() ,
при котором переменный угол передачи
движения
,
при котором переменный угол передачи
движения
![]() ни в одном положении кулачкового
механизма не будет меньше
ни в одном положении кулачкового
механизма не будет меньше
![]() .
Для этого необходимо построить диаграмму
.
Для этого необходимо построить диаграмму
![]() ,
представляющую собой изменение
перемещения толкателя (
,
представляющую собой изменение
перемещения толкателя (![]() )
в зависимости от его скорости (
)
в зависимости от его скорости (![]() ),
графически исключив ось
из диаграмм
),
графически исключив ось
из диаграмм
![]() и
и
![]() .
.
На построенных координатах начинаем построение, для этого нам необходимо использовать две диаграммы - скорости и перемещения.
С диаграммы перемещения, замеряем отрезок по оси ординат, для текущего положения, и откладываем его на графике вдоль оси S из точки О. Затем по диаграмме скорости определяем скорость для данного положения и откладываем его параллельно оси абсцисс из полученной точки. Проделываем это действие для всех положений ползуна, полученные отрезки соединяем.
Далее проводим
касательные прямые под углом
![]() (с обеих сторон полученного кулачка).
Прямые в точке максимального подъёма
толкателя пересекутся в некоторой
точке, определяющей минимальный радиус
кулачковой шайбы. Центр вращения кулачка
выбираем в точке С, расположенной в
области допустимых положений центров
(заштрихована), образуемой прямыми. Это
производится для избежания больших по
величине локальных напряжений в зоне
контакта кулачка с роликом.
(с обеих сторон полученного кулачка).
Прямые в точке максимального подъёма
толкателя пересекутся в некоторой
точке, определяющей минимальный радиус
кулачковой шайбы. Центр вращения кулачка
выбираем в точке С, расположенной в
области допустимых положений центров
(заштрихована), образуемой прямыми. Это
производится для избежания больших по
величине локальных напряжений в зоне
контакта кулачка с роликом.
ОС= – радиус начальной шайбы.
В нашем случае начальный радиус принят – =60 мм.
Кинематический синтез кулачкового механизма.
3.2.1 Профилирование кулачка.
Из точки О проводим окружность радиуса и делим её на части, пропорциональные фазовым углам. Каждую часть делим на количество отрезков. В нашем случае 6. От точек деления по окружности откладываем вдоль радиальных лучей соответствующие им перемещения, взятые из диаграммы S(φ). Через полученные точки проводим плавную пунктирную линию. Эта линия будет теоретическим профилем кулачка.
3.2.2 Построение конструктивного профиля кулачка.
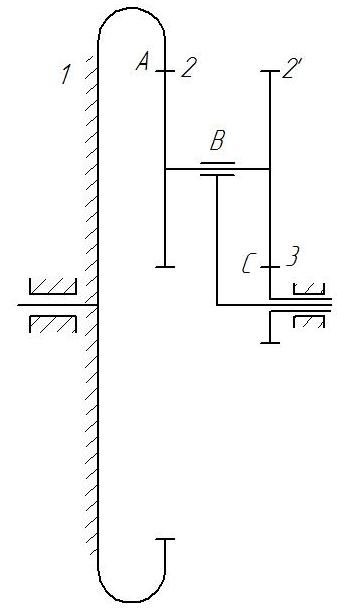
4. Синтез зубчатой передачи.
№ |
|
|
|
0 |
7,2 |
23 |
37 |
![]()
![]()
![]()
Подбираем число зубьев механизма
![]()
![]()
Минимальное число зубьев =17, поэтому умножаем получившиеся числа на 2.
z1= 124, z2= 52, z2/= 52, z3=20.
Проведем проверку:
1) Условие соосности:
z3 –z2/= z1 –z2
124–52 = 52–20, условие соблюдается
2) Условие сборки:
![]() ,
где k–число
сателлитов (1-6), с–целое число.
,
где k–число
сателлитов (1-6), с–целое число.
![]() ,
условие соблюдается
,
условие соблюдается
3) Условие соседства:
(z3+
z2)sin![]() – z2
>2
– z2
>2
(z3+ z2/)sin – z2/ >2
(20+52)1–52=20>2
(20+52)1–52=20>2, условие соблюдается.
Рассчитаем радиусы зубьев
![]() ,
m
– модуль, принимаем m=2
,
m
– модуль, принимаем m=2
r1 =124 мм, r2 =52 мм, r2/ = 52мм, r3 =20 мм.
Рассчитываем
скорость точки С, Vс
=
![]() ∙r1
= 73,3∙0,124=9,1 м/с
∙r1
= 73,3∙0,124=9,1 м/с
Находим масштабный
коэффициент
![]()
В точке А скорость равна нулю, так как первое колесо закреплено.
Определяем скорости в остальных точках:
![]()
![]()
4.1. Описание построения планов линейных скоростей.
Для построения плана линейных скоростей надо:
перенести все точки зацеплений на нормаль
отметить остановленные точки
отложить скорость водила
 =40
м/с (произвольно)
=40
м/с (произвольно)скорость водила соединяем с остановленной точкой А и получаем скорость
 ,
,
продлевая этот
отрезок, получаем скорости
![]() и
и
![]()
скорость VC соединяем с остановленной точкой F, и получаем скорость шестерни 3’
скорость шестерни 3’ соединяем с остановленной точкой E
продлевая этот отрезок, получаем скорость
 .
.
4.2. Описание построения планов угловых скоростей.
Для построения плана угловых скоростей необходимо из произвольной точки откладывать соответствующие углы от нормали.
Например, для
водила угол расположен между нормалью
и отрезком, соединяющим точку A
и скорость шестерни
![]() .
Остальные скорости строятся аналогично.
.
Остальные скорости строятся аналогично.