

Министерство транспорта Российской Федерации
Федеральное агентство морского и речного транспорта
Крымский филиал ВГБОУ ВПО
«Государственный морской университет им. адм. Ф.Ф. Ушакова»
__________________________________________________________________
Кафедра "Фундаментальные дисциплины"
Теория механизмов и машин
Пояснительная записка к курсовому проекту
Студент: ____________________
Группа: ЭСЭУ-3 (СП)
Преподаватель: доцент Быков В.П.
г. Севастополь 2012
1. Синтез и кинематическое исследование рычажного механизма.
№ вар. |
noa об/мин |
Размеры звеньев, мм |
||||
OA |
AB |
BD |
CB |
DE |
||
10.0 |
700 |
100 |
400 |
300 |
180 |
450 |
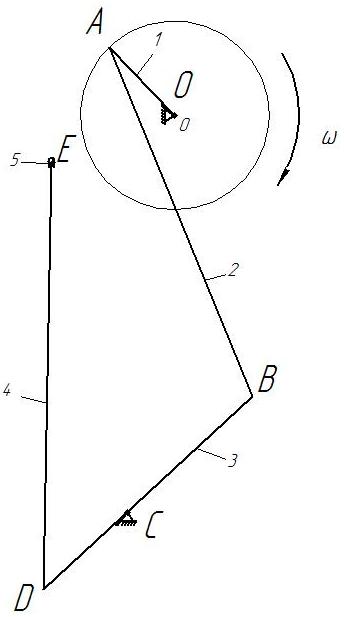
Таблица 1. Таблица кинематических пар:
Обозначение пары |
Подвижность пары |
Звенья, образующие пару |
Вращ., пост. |
0-1 |
одноподвижная |
Стойка-кривошип |
вращательная |
1-2 |
одноподвижная |
Кривошип-шатун |
вращательная |
2-3 |
одноподвижная |
Шатун-коромысло |
вращательная |
3-0 |
Одноподвижная
|
Коромысло-стойка |
вращательная |
3-4 |
одноподвижная |
Коромысло-шатун |
вращательная |
4-5 |
одноподвижная |
Шатун-ползун |
вращательная |
5-0 |
одноподвижная |
Ползун-стойка |
поступательная |
Количество звеньев механизма: 5
Количество низших
кинематических пар![]() :
7
:
7
Определяем степень свободы механизма:
![]() (1.1)
(1.1)
Механизм работает, одно ведущее звено.
Описание построений плана положений механизма.
Примем длину кривошипа 0,05 м. Рассчитаем масштабный коэффициент по формуле:
![]() м/мм (1.2)
м/мм (1.2)
В этом масштабе вычерчиваем планы механизма в 12 равноотстоящих положениях кривошипа. За нулевое принимаем одно из крайних положений механизма. Для этого необходимо найти длины отрезков всех остальных звеньев механизма, которые будут изображать их на чертеже:
![]() мм, (1,3)
мм, (1,3)
![]() мм,
(1.4)
мм,
(1.4)
и так далее.
1.2 Описание построения диаграмм перемещения, скоростей, ускорений ползуна E.
Диаграмму перемещения
строим в координатах S,
![]() На оси абсцисс откладываем отрезок
L=120 мм, изображающий полный угол поворота
кривошипа. Делим этот отрезок на 12
частей. Таким образом, получаем масштабный
коэффициент оси φ.
На оси абсцисс откладываем отрезок
L=120 мм, изображающий полный угол поворота
кривошипа. Делим этот отрезок на 12
частей. Таким образом, получаем масштабный
коэффициент оси φ.
![]() (1.5)
(1.5)
По оси ординат откладываем перемещения ползуна S, полученные из плана положений. Для этого измеряем величину отрезков от нулевого положения ползуна до текущего. Откладываем их на диаграмме перемещений от соответствующих точек оси абсцисс вертикально вверх в масштабе:
![]()
Полученные точки соединяем плавной кривой.
Диаграмма скорости
ползуна строится методом графического
дифференцирования диаграммы перемещений.
Для этого под диаграммой перемещений
строим оси координат
![]() и φ. На продолжении оси абсцисс - слева
откладываем отрезок длиной
и φ. На продолжении оси абсцисс - слева
откладываем отрезок длиной
![]() .
.
Из точки
![]() проводим лучи, параллельные координатам
кривой S(φ)
на соответствующих участках. Эти лучи
продолжаем до пересечения с осью ординат
.
Затем от точек пересечения проводим
прямые, параллельные оси абсцисс до
середины соответствующего участка.
Полученные точки соединяем плавной
кривой.
проводим лучи, параллельные координатам
кривой S(φ)
на соответствующих участках. Эти лучи
продолжаем до пересечения с осью ординат
.
Затем от точек пересечения проводим
прямые, параллельные оси абсцисс до
середины соответствующего участка.
Полученные точки соединяем плавной
кривой.
Имея диаграмму
скорости ползуна, аналогично построим
диаграмму тангенциальных ускорений
ползуна. Масштабный коэффициент
![]() для диаграмм
для диаграмм
![]() остаётся
неизменным. На продолжении оси абсцисс
φ влево откладываем отрезок
остаётся
неизменным. На продолжении оси абсцисс
φ влево откладываем отрезок
![]() .
.
Угловая скорость вращения кривошипа определяется по формуле:
![]() (1.6)
(1.6)
Масштабные коэффициенты осей и найдём по формулам:
![]() (1.7)
(1.7)
 (1.8)
(1.8)
Описание построения планов скоростей
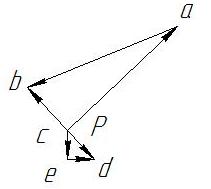
Рис.1
Рассмотрим
построение плана скоростей для 5
положения. Выбираем произвольно полюс
Р (рис.1) и откладываем от него отрезок
перпендикулярно к звену ОА в сторону
вращения кривошипа вектор , Pa=40 мм,
изображающий скорость
![]() в
масштабе:
в
масштабе:
![]() (1.9)
(1.9)
 (1.10)
(1.10)
Скорость точки В находится из условия:
![]() (1.11)
(1.11)
![]() (1.12)
(1.12)
Векторы относительных скоростей VВA и VBC известны только по направлению. Вектор относительной скорости VВA перпендикулярен звену AВ, а вектор VВC — звену CВ.
Точка C неподвижна, поэтому VC=0. Таким образом, рассматриваемая группа присоединена к двум точкам, скорости которых известны и по направлению, и по величине.
В соответствии с векторным уравнением (1.11) на плане скоростей проводим через точку (а) прямую, перпендикулярную звену AВ. Это есть линия вектора VBA. В соответствии с векторным равенством (1.12) проводим через точку C на плане скоростей прямую, перпендикулярную звену CB. Это будет линия вектора VCB. Точка (в) пересечения этих двух прямых и будет определять конец вектора, изображающего на плане скоростей вектор Vв. Чтобы определить истинную величину любого из векторов в м/с, надо его длину умножить на масштаб плана скоростей.
Например:
![]()
![]()
Для определения скорости точки D воспользуемся тем, что картина относительных скоростей образует на плане скоростей фигуру, подобную фигуре звена и повернутую относительно ее на 90° в сторону вращения звена. В соответствии с этим отрезок рb плана скоростей разделим в отношении DВ: CB, т. е.
![]()
Откуда
![]()
Величина скорости точки D, м/с
![]()
Для определения скорости точки E напишем векторные уравнения
![]() (1.13)
(1.13)
![]() (1.14)
(1.14)
Вектор относительной скорости VED и вектор абсолютной скорости VE не известны по величине, но известны по направлению. В соответствии с векторным уравнением через точку D на плане скоростей проводим прямую, перпендикулярную звену ED. Это будет линия относительной скорости, где далее проводим линию параллельно направляющей
Х-Х. Точка E, пересечения этих прямых и есть искомая точка. Истинная величина скорости точки E, м/с
![]()
![]()
Определим угловые скорости. Угловая скорость звена 2, рад/с, определяется по формуле
 (1.15)
(1.15)
Чтобы определить направление угловой скорости 2, следует вектор относительной скорости VBA перенести в точку В механизма, а точку A мысленно закрепить. Тогда вектор VBA будет стремиться вращать звено 2 по ходу часовой стрелки. Это и будет направление угловой скорости 2
Остальные угловые скорости:
 (1.16)
(1.16)
 (1.17)
(1.17)
Угловая скорость 3 направлена против часовой стрелки, 4 — по часовой стрелке.
Таблица 2. Таблица линейных и угловых скоростей звеньев в 12 положениях.
1.4. Описание построения планов ускорений

Рис.2
Рассмотрим
построение плана ускорений на примере
некоторого положения. Из произвольного
полюса
![]() (рис.2)
откладываем вектор , параллельный звену
ОА и направленный от точки А к точке О.
В нашем случае величина
(рис.2)
откладываем вектор , параллельный звену
ОА и направленный от точки А к точке О.
В нашем случае величина
![]() =50
мм, изображающий ускорение
=50
мм, изображающий ускорение
![]() в масштабе:
в масштабе:
![]() (1.18)
(1.18)
![]() (1.19)
(1.19)
Для определения ускорения точки В напишем уравнение, рассмотрев движение точки В относительно точек A и C:
 (1.20)
(1.20)
 (1.21)
(1.21)
Ввиду того, что
![]() у точки А будет только нормальное
ускорение и не будет тангенционального.
у точки А будет только нормальное
ускорение и не будет тангенционального.
Нормальные ускорения можно определить по величине и направлению. Величина вектора
 (1.22)
(1.22)
 (1.23)
(1.23)
Вектор
 направлен вдоль звена AВ
от точки В к точке A
(к центру относительного вращения).
Вектор
направлен вдоль звена AВ
от точки В к точке A
(к центру относительного вращения).
Вектор
 направлен вдоль звена BC
от точки B
к точке С.
направлен вдоль звена BC
от точки B
к точке С.
Для того, чтобы построить ускорение точки В на плане ускорений, нужно из конца вектора отложить вектора в следующей последовательности:
![]() ,
,
![]()
![]()
Затем строим сумму векторов правой части векторного уравнения (1.21). Для этого проводим из полюса параллельно звену СВ вектор anBС. Его масштабная величина на плане ускорений nbc = anВC/a. Затем через точку nbc перпендикулярно звену CВ проводим вектор тангенциального ускорения aBC . Пересечение векторов aBC и aBA определит точку b. Вектор nbab выражает ускорение aBA, а вектор nbcb выражает ускорение aBC.Если соединить точку а с точкой b на плане ускорений, то вектор аb выразит полное относительное ускорение aBA, так как является геометрической суммой векторов anBA и aBA. И, наконец, вектор b выражает на плане ускорений вектор абсолютного ускорения точки В.
Для определения ускорения точки D воспользуемся свойством подобия. На основании теоремы подобия имеем
Тогда
![]()
Для определения ускорения точки E напишем векторное уравнение
![]() (1.24)
(1.24)
Рассмотрим векторы, входящие в данное уравнение. Вектор aD мы определили ранее. Величина вектора anED, м/с2, определяется по формуле
![]() (1.25)
(1.25)
а остальные векторы известны только по направлению.
Достраиваем план ускорений. Из точки d параллельно звену ED проводим вектор anED, масштабная величина которого, мм, на плане ускорений равна dned = anED /a
Через точку перпендикулярно звену DE проводим вектор aED, а через точку параллельно направляющей — вектор aE. На пересечении векторов aED и aE получим точку e, которая определит их величины. Полученный вектор nede на плане ускорений выражает в масштабе ускорение aED, а вектор e является изображением вектора ускорения ae. Если соединить точку (d) с точкой (e), то вектор de будет изображать полное относительное ускорение aED.
1.5 Определим угловые ускорения. Ведущее звено 1 вращается с постоянной угловой скоростью, поэтому его угловое ускорение 1=0.
Угловое ускорение звена 2, с-2, равно величине тангенциального (касательного) ускорения aBA, деленной на длину звена AB, т.е.:
![]() (1.26)
(1.26)
Чтобы определить направление углового ускорения 2, вектор относительного ускорения aBA следует перенести с плана ускорений в точку В механизма, а точку A мысленно закрепить. Тогда вектор aBA будет стремиться вращать звено 2 против хода часовой стрелки. Это и будет направление 2.
Подобным образом находим угловые ускорения остальных звеньев;
![]() (1.27)
(1.27)
![]() (1.28)
(1.28)
3 направлен против хода часовой стрелки, 4 направлен по ходу часовой стрелки.
Таблица3. Таблица ускорений для 0-го и 5-го положений.
|
0 |
5 |
|
686,51 |
386,27 |
|
257,44 |
257,44 |
|
457,64 |
202,44 |
|
394,62 |
95,5 |
|
686,51 |
384,5 |
|
168,1 |
155,36 |
|
986,55 |
238,75 |
|
3813,94 |
2136,11 |
|
373,56 |
345,24 |