

Лабораторна робота №8 Тема: Будова та принцип роботи аналітичного фотограмметричного приладу "Стереоанаграф"
Мета роботи: вивчення будови та принципу роботи аналітичного фотограмметричного приладу "Стереоанаграф".
1 Основні теоретичні положення
Будова і принцип роботи стереоанаграфа АФП-4
Високоточний стереоплоттер, що використовується для фототріангуляції і створення/оновлення карт і планів стереотопографічним методом. Забезпечує обробку аерокосмічних знімків розміром до 300х300мм. Середньоквадратична похибка вимірювання координат не перевищує 3 мікрометри. Стереокомпаратор забезпечує плавну зміна діаметру вимірювальної марки. Станція базується на стандартному Intel-сумісному комп'ютері з операційною системою Windows.
Таблиця 8.1 - Технічні характеристики АФП-4
Максимальний формат знімків, мм |
300х300 |
Фокусні відстані знімків, мм |
без обмеження |
Перекриття знімків, % |
0-100 |
Роздільна здатність, мкм |
1 |
Інструментальна скп визначення координат, мкм не більш |
±3 |
Плавна зміна (збільшення) оптичної системи, кpат |
7-21 |
Можливість переключення оптичних осей |
є |
Розмір вимірювальної марки, мкм |
25-100 |
Розворот зображення, градусів |
360 |
Керуючий комп'ютер |
Intel/Windows |
Живлення |
220В/50/60Гц |
Споживаюча потужність, без комп'ютера |
150Вт (Макс) |
Маса, кг |
250 |
Габаритні розміри, мм |
1600x1400x1000 |
Загальна будова АФП-4 і взаємодія його складових частин показана на рис.8.1, рис.8.2, рис.8.3.

Рисунок 8.1 – АФП “Стереоанаграф”
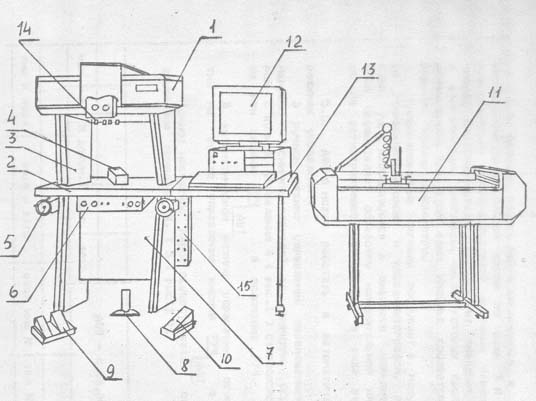
Рисунок 8.2 – Схема АФП «Стереоанаграф”
АФП-4 (див. рис.8.2) складається з:
стереокомпаратора 1;
столу стереокомпаратора 2 зі стійкою 3;
робочого столу 13;
пульту керування 4;
координатографа 11;
блоку живлення 7;
ножних органів керування 8, 9, 10;
приводів X, У, 5.
Живлення АФП-4 здійснюється від мережі змінного струму 220 В, частотою 50 Гц.
Принцип роботи АФП-4 полягає у вимірюванні лінійних переміщень вимірювальної марки по осях X і У за допомогою фотоелектричних перетворювачів лінійних переміщень. Фотоелектричні перетворювачі перетворюють значення лінійних переміщень в електричні імпульси, число яких пропорційно величині переміщення. При цьому один імпульс відповідає переміщенню на один мікрометр.
Перетворені сигнали надходять у модулі зв'язку ПЕОМ зі стереокомпаратором і координатографом, де перетворюються в цифрову вимірювальну інформацію. ПЭВМ здійснює обробку вимірювальної інформації і передає її на реєструючий пристрій у вигляді результатів вимірів.
АФП-4 може працювати в автоматичному і ручному режимах керування.
У ручному режимі керування переміщенням фотокареток з марками і знімкотримачів зі знімками здійснюється оператором з пульту керування 4 (рис.8.2) стереокомпаратора при натисканні на ньому кнопки РУЧ-АВТ у положення РУЧ.
В автоматичному режимі керування здійснюється при натисканні на пульті керування кнопки РУЧ у положення АВТ.
Точне наведення марок здійснюється оператором за допомогою штурвалів приводів X, У - 5 ( рис.8.2).
Спостереження і передача зображень вимірювальних марок і знімків у правій і лівій гілках забезпечуються окулярами.
АФП-4 дозволяє автоматично змінювати тип вимірювальних марок і збільшення оптичної системи від 7 крат до 21 крата.
Органи керування АФП-4 дозволяють здійснювати сумісне і диференціальне переміщення фотокареток і знімкотримачів.
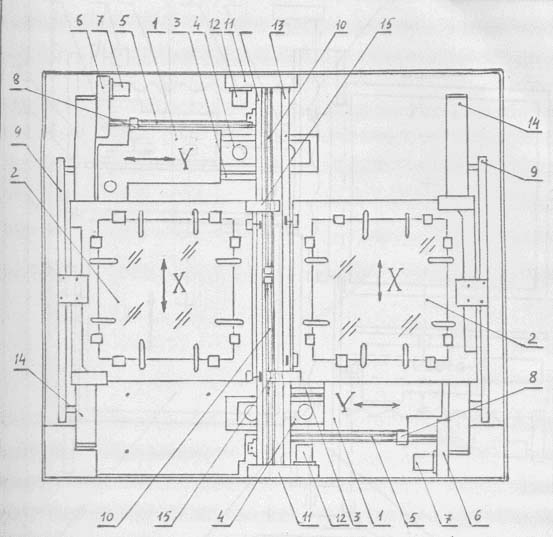
Рисунок 8.3 - Схема стереокомпаратора АФП-4
Сумісне переміщення по осях X і Y є основним. Переміщення лівого каналу щодо правого є диференціальним - X і У. Стереокомпаратор (рис.8.3) складається з двох однакових лівої і правої оптичної та механічної гілок, кожна з яких складається з:
фотокаретки 1;
знімкотримачів 2;
перетворювачів лінійних переміщень 3, 9;
направляючих 4 фотокареток;
центральної направляючої 14 і направляючих 13 знімкотримачів 2;
ходових гвинтів 5 фотокареток і 10 знімкотримачів;
гайок ходових гвинтів 8 і 15;
приводів 6 фотокареток і приводів 11 знімкотримачів;
органів керування 14.
Фотокаретки перемечаются по осі Y, знімкотримачі - по осі X.
Переміщення є незалежними один від одного. Стереокомпаратор закривається відкидною кришкою.