

Содержание
1. Структурный анализ механизма…………………………………………………4
2. Кинематическое и силовое исследование механизма………………………..…6
2.1 Планы положений механизма…………………………………………….....6
2.2 Определение линейных скоростей точек механизма…………………..…..6
2.3 Угловые скорости звеньев механизма……………………………………....8
2.4 Определение линейных ускорений точек механизма …………..………....8
2.5 Определение угловых ускорений звеньев механизма……………………..10
3.Кинестостатическое исследование механизма ДВС……………………………..11
3.1 Определение избыточного давления P газов на поршень……………...…11
3.2 Определение сил инерции звеньев…………………………………………..11
3.3 Определение сил тяжести звеньев…………………………………………...12
3.4 Определение давления в кинематических парах…………………………...12
3.4.1 Pассмотрение равновесия двухповодковой группы звеньев 4 и 5
(положение№4) ……………………………………………………………….12
3.4.2 Равновесие двухповодковой группы 2,3 (положение №4)..……...….13
3.4.3 Равновесие кривошипа (положение 4)………………………………...13
3.4.4 Проверка (Положение №4)….…………………………………………14
3.4.5 Равновесие двухповодковой группы 2,3 (положение №10)…………14
3.4.6 Равновесие кривошипа (положение №10)…….……………………....14
4. Синтез зубчатого привода………………………………………………………..14
а) Синтез рядовой зубчатой передачи…………………………………………..15
б) Синтез соосного цилиндрического планетарного редуктора………………16
5. Синтез плоского кулачкового механизма……………………………………….17
5.1 Построение диаграмм движения толкателя…………………………….…..17
5.2 Определение минимального радиуса кулачка…………………………......17
5.3 Профилирование кулачка……………………………………………………18
6. Список литературы………………………………………………………………..19
1. Структурный анализ механизма
 Исходные
данные:
Исходные
данные:
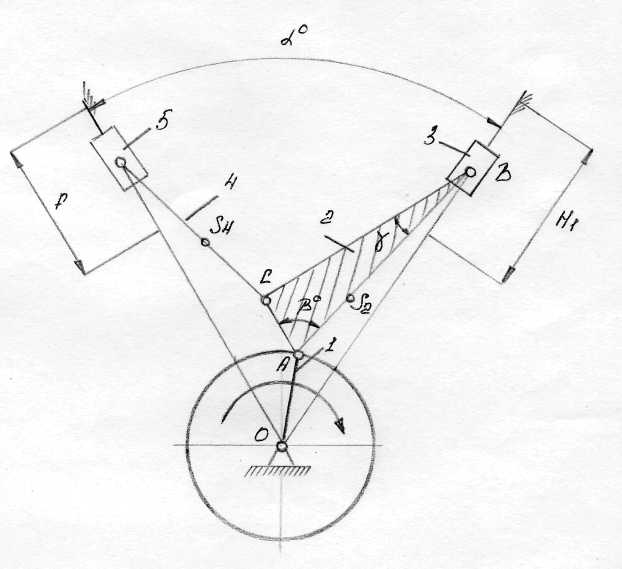
Н1=300 мм.
ОА=r=38 мм.
АB=ℓ1=150 мм.
β°=50°
CF=ℓ2=120 мм.
AF2=48 мм.
CF4=48 мм.
α°=50°
Рис.1- схема ДВС
D=160 мм.
АВ= λ·ОА= 600мм
z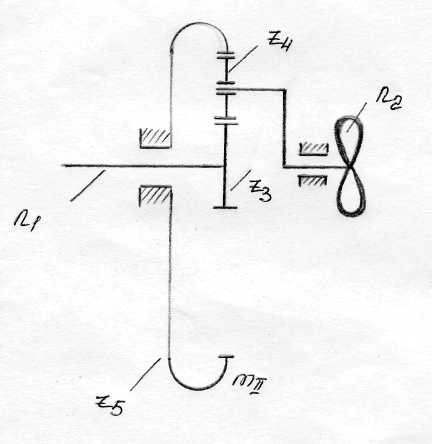 1=15
1=15
z2=30
ξ1=0,908
ξ2=0,428
mI=3 мм.
mII=6 мм. m1=14 кг
m2=12 кг m3=19 кг
m4=3,5 кг m5=9 кг
Js2= 0,1 кг*м2 n1=4000 об/мин
Js4= 0,1 кг*м2 n2=1270 об/мин
λ =4
=4
γ=75º
h=50 мм Рис.2 – схема планетарного редуктора
φy=60º
Cтруктурный анализ механизма
Кривошипно-шатунный механизм V-образного ДВС состоит из 5 подвижных звеньев: О-стойка; 1- кривошип ОА; 2 и 4 – шатуны; 3 и 5 ползуны (поршни), и 7 кинематических пар: I – стойка-кривошип ОА; II – кривошип ОА шатун АВС; III – штун АВ – ползун В; IV – шатун В – стойка; V - шатун АВС – шатун CF; VI - шатун CF – поршень F; VII - поршень F – стойка.
Все кинематические пары – низшие. Подвижных звеньев n=5; число низших кинематических пар Р5=7, Р4=0. степень подвижности определяем по формуле Чебышева: WIII=3n-2p5-p4=3·5-2·7=1
Согласно классификации Артоболевского данный механизм состоит из механизма 1 класса (стойка-кривошип) и структурных групп 2-го класса второго порядка (группа 5, 4 и группа 2, 3). Поэтому механизм является механизмом 2 класса, второго порядка.
По классификации Асура данный механизм является механизмом1 класса, второго порядка.
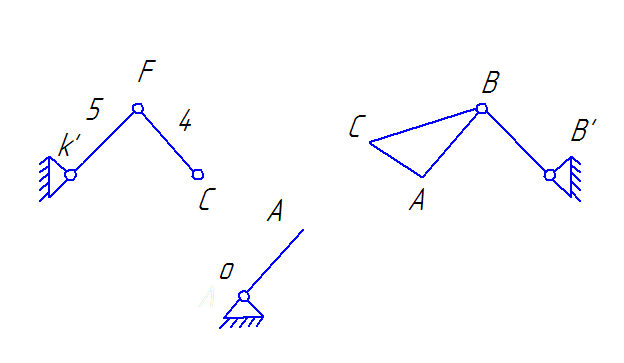
1 кл. 1 пор. по Ассуру
1 кл. 1 пор. по Артоболевскому
Рис.3 – группы Ассура
2. Кинематическое и силовое исследование механизма.
2 .1 Планы положений механизма.
1.
Под углами
![]() к вертикали проводим направляющие 1 и
2, проходящие через центр вращения
кривошипа.
к вертикали проводим направляющие 1 и
2, проходящие через центр вращения
кривошипа.
2.
Из центра О – вращения кривошипа ОА1
радиусами, равными длине (ℓ+r)
и (ℓ-r)
отмечаем
![]() –
верхнее и
–
верхнее и
![]() - нижнее крайнее положение поршня
- нижнее крайнее положение поршня
![]() .
.
Рис.4
3. Траектория пальца А кривошипа от точки А0 делим на 12 равных частей и из полученных точек А1, А2, … А11 отмечаем положения В1, В2, … В11 на линии О1.
Соединяем полученные точки А1, А2, … А11 с центром О и соответствующими точками В1, В2, … В11.
4. Определяем положение точек С кривошипа АВС для чего откладываем угол β и расстояние АС.
5. Из центров С радиусом CF делаем засечки (положение поршня F) на траектории движения.
6. Соединяем точки С и F, находим положение кривошипа CF и поршня F.
Таким образом получаем 12 планов положений механизма, соответствующие разным положениям кривошипа ОА.
2.2 Определение линейных скоростей точек механизма.
1. Угловая скорость вращения кривошипа.
![]()
![]()
2. Скорость точки А кривошипа.
υА=τ·ω1=lОА·ω1=0,15·418,6= 62,7м/с
υА![]() О1А
и направлена в сторону ω1
О1А
и направлена в сторону ω1
![]() =
=![]() ,
пусть
,
пусть
![]() =90
мм.
=90
мм.
3. Масштаб плана скоростей.
![]()
4. Скорость точки В шатуна АВС
1)
![]()
Скорость
точки В находится графическим решением
уравнений (построением плана скоростей)
![]()
5. Скорость точки С шатуна АВС определим из подобия треугольников
∆АВС~ ∆авс
6. Скорость точки F шатуна CF находим совместным графическим решением уравнений 3)
3)![]()
Полученные значения скоростей сводим в таблицу.
-
Положение механизмов
Размерность
Скорости точек
υА
υВ
υС
υF
4
Мм
0,15
88
86
44
м/с
59,7
58
56,8
29
10
Мм
0,15
93
88
60
м/с
59,7
61
58
39,6
2
мм
0,15
60
93
89
м/с
59,7
39,6
60,06
58,74
8
Мм
0,15
40
102
100
м/с
59,7
26,4
67,32
66