

1) Трансформаторы — электромагнитные статические преобразователи электрической энергии. Основное назначение трансформаторов — изменять напряжение переменного тока. Трансформаторы применяются также для преобразования числа фаз и частоты. По числу фаз трансформаторы делятся на однофазные, двухфазные, трехфазные и многофазные. Повышающие и понижающие трансформаторы. Масляные и сухие. Принцип действия: На одну из обмоток, называемую первичной обмоткой, подаётся напряжение от внешнего источника. Протекающий по первичной обмотке переменный ток создаёт переменный магнитный поток в магнитопроводе. В результате электромагнитной индукции, переменный магнитный поток в магнитопроводе создаёт во всех обмотках, в том числе и в первичной, ЭДС индукции, пропорциональную первой производной магнитного потока, при синусоидальном токе сдвинутой на 90° в обратную сторону по отношению к магнитному потоку. Основные части трансформатора - это магнитопровод и обмотки.
2)
Зная картину магнитного поля в
трансформаторе, можно определить ЭДС,
действующие в обмотках:
![]() - ЭДС первичной обмотки от поля
взаимоиндукции;
- ЭДС первичной обмотки от поля
взаимоиндукции;
 - ЭДС первичной обмотки от поля
рассеяния;
- ЭДС первичной обмотки от поля
рассеяния;
 -
ЭДС вторичной обмотки от поля
взаимоиндукции;
-
ЭДС вторичной обмотки от поля
взаимоиндукции;
 -
ЭДС вторичной обмотки от поля
рассеяния.
Уравнения трансформатора
представляют собой баланс напряжений
и ЭДС, действующих в каждой
обмотке:
-
ЭДС вторичной обмотки от поля
рассеяния.
Уравнения трансформатора
представляют собой баланс напряжений
и ЭДС, действующих в каждой
обмотке:
 (2.6)
Здесь напряжение
(2.6)
Здесь напряжение ![]() рассматривается
как ЭДС источника питания, а
рассматривается
как ЭДС источника питания, а ![]() -
как падение напряжения на нагрузке.
Решая
систему (2.6) относительно напряжений,
получим
-
как падение напряжения на нагрузке.
Решая
систему (2.6) относительно напряжений,
получим
 (2.7)
(2.7)
Используя
полученные выше выражения для ЭДС и
принимая допущение ![]() ,
представим уравнение (2.7) в виде линейной
системы дифференциальных
уравнений:
,
представим уравнение (2.7) в виде линейной
системы дифференциальных
уравнений:
 (2.8)
Реактивная составляющая тока
намагничивания
(2.8)
Реактивная составляющая тока
намагничивания ![]() определяется
из уравнения для результирующей
МДС:
определяется
из уравнения для результирующей
МДС:
![]() ,
отсюда
,
отсюда
![]() .
(2.9)
.
(2.9)
3) Уравнение магнитодвижущих сил. Исходя из соображений, изложенных в п. 2.4.1, запишем МДС (для мгновенных значений)
![]() ,
,
где![]() —
мгновенное значение результирующей
МДС обеих обмоток.
—
мгновенное значение результирующей
МДС обеих обмоток.
При
неизменном действующем значении
напряжений ![]() результирующий
магнитный поток
результирующий
магнитный поток ![]() практически
остается также неизменным в режимах от
холостого хода до номинального, поэтому
практически
остается также неизменным в режимах от
холостого хода до номинального, поэтому
![]()
или в комплексной форме
![]() (2.5)
(2.5)
Уравнение токов.
Разделив
обе части (2.5) на ![]() ,
получим:
,
получим:
![]() .
(2.6а)
.
(2.6а)
Обозначив ![]() ,
запишем для токов
,
запишем для токов
![]() (2.6б)
(2.6б)
Из
(2.6б) следует, что ток ![]() можно
рассматривать состоящим из двух
составляющих: одна
можно
рассматривать состоящим из двух
составляющих: одна ![]() определяет
основной магнитный поток
,
а вторая
определяет
основной магнитный поток
,
а вторая ![]() компенсирует
компенсирует
размагничивающее действие тока вторичной обмотки.
Ток
холостого хода ![]() составляет
лишь несколько процентов тока
составляет
лишь несколько процентов тока ![]() .
Если им можно пренебречь, то из (2.6а)
следует, что токи обмоток
и
.
Если им можно пренебречь, то из (2.6а)
следует, что токи обмоток
и ![]() обратно
пропорциональны числам витков, т. е
обратно
пропорциональны числам витков, т. е![]() или
с индексами высшего и низшего напряжений
или
с индексами высшего и низшего напряжений
![]() .
(2.7)
.
(2.7)
Из (2.7) следует, что в обмотке с большим числом витков ток меньше.
4) Если число витков первичной и вторичной обмоток различно, то осуществляют приведение параметров трансформатора. Приведением параметров трансформатора называется операция условной замены действительной вторичной обмотки с числом витков фиктивной вторичной обмоткой с числом витков w2'=w1=w2k, таким образом, чтобы физические процессы в приведенном трансформаторе оставались такими же, как и в реальном. В силу того, что w2'=w1, то , где - ЭДС вторичной обмотки реального трансформатора. Намагничивающие силы вторичной обмотки реального и приведенного трансформатора должны быть одинаковы, то есть i 2w2=i '2w'2. Следовательно, i '2=i 2w2/w'2==i 2/k, где i '2 - приведенный ток вторичной обмотки трансформатора. Полные электромагнитные мощности в нагрузке реального и приве-денного трансформатора должны быть одинаковы, то есть U2I2= U2'I2' Следовательно, U2'= U2I2/I2'= U2k, где U2' - приведенное напряжение на нагрузке. На основе равенства электрических потерь мощности во вторичных обмотках реального и приведенного трансформатора I22R2= I2'2R2', находим R2'=(I22/I2'2)R2=k2R2, где R2' - приведенное активное сопротивление вторичной обмотки. На основе равенства реактивных мощностей в инуктивностях рассеяния реального и приведенного трансформатора I22X2s = I2'2X2s ' нахо-дим X2s ' =(I22/I2'2) X2s = k2 X2s или w L2s ' =(I22/I2'2) w L2s = k2 w L2s , где L2s ' - приведенная индуктивность рассеяния вторичной обмотки трансформатора.
5)
-----Схема
з амещения
трансформаторов.
амещения
трансформаторов.
6) Векторная диаграмма трансформатора

Воспользуемся вторым основным уравнением и произведем сложение векторов:
![]()
Для этого к концу вектора E2‘ пристроим вектор – j I2‘ x2‘, а к его концу – вектор – I2‘ r2‘. Результирующим вектором U2‘ будет вектор, соединяющий начало координат с концом последнего вектора. Теперь используем третье основное уравнение:
![]()
из которого видно, что вектор тока I1 состоит из геометрической суммы векторов I10 и – I2‘. Произведем это суммирование и достроим векторную диаграмму трансформатора. Теперь вернемся к первому основному уравнению:
![]()
Чтобы построить вектор – Е1 , нужно взять вектор +Е1 и направить его в противоположную сторону. Теперь можно складывать с ним и другие векторы: + j I1 x1 и I1 r1. Первый будет идти перпендикулярно току, а второй – параллельно ему. В результате получим суммарный вектор u1.
Построенная векторная диаграмма трансформатора имеет общий характер. По этой же методике можно осуществить ее построение как для различных режимов, так и для разных характеров нагрузки.
7) Важной величиной, характеризующей экономичность работы трансформатора, являетсякоэффициент полезного действия (КПД), равный отношению активной мощности, отдаваемой трансформатором во вторичную сеть Р2, к активной мощности Р1, потребляемой из сети:
|
|
Первичная активная мощность определяется суммой, которая включает активную мощность Р2, магнитные потери Рм(потери в стали), электрические потери в первичной и вторичной обмоткахРэ1, Рэ2:
|
|
В современных силовых трансформаторах КПД достигает 0,98—0,995, причем максимальные значения КПД получаются при (0,45—0,65)Р2ном. Такая нагрузка обычно соответствует средней нагрузке при эксплуатации трансформатора. Отметим, что в диапазоне нагрузок (0,4—1,5)Р2номКПД трансформатора изменяется относительно мало.
8) 9.5. Опытное определение параметров схемы замещения трансформатора
Параметры схемы замещения можно определить по опытам холостого хода и короткого замыкания.
При опыте холостого хода (рис. 9.10 а) вторичная обмотка разомкнута, а к первичной обмотке подводится номинальное напряжение. В первичной цепи процентах напряжение на первичной обмотке, при котором в накоротко замкнутой вторичной обмотке протекает номинальный ток
 .
(9.16)
.
(9.16)
Для
силовых трансформаторов напряжение
![]() Uк
= 5…8%.
Uк
= 5…8%.
Согласно схеме замещения (рис. 9.8)
напряжение короткого замыкания
 (9.17)
(9.17)
активная составляющая напряжения короткого замыкания
 (9.18)
(9.18)
реактивная составляющая напряжения короткого замыкания
 (9.19)
(9.19)
Эти
напряжений
![]() ,
,
![]() ,
,
![]() связаны между собой соотношением
связаны между собой соотношением
![]() .
(9.20)
.
(9.20)
Опыт холостого хода — это определение реальных параметров элементов для используемых в расчётах схем замещения обычно активных двухполюсников, а именно при отсутствии внешней цепи можно определить величину ЭДС, так как из формулы закона Ома для полной цепи при сопротивлении внешнего участка стремящегося к бесконечности величина напряжения на клеммах реального элемента напряжение стремится к ЭДС, но следует учитывать соотношение внутреннего и внешнего сопротивлений: внешнее сопротивление должно быть намного больше внутреннего сопротивления источника, а на переменном токе следует учитывать реактивные составляющие сопротивления измерительного прибора. Целью этого опыта и является определение параметра ЭДС генератора для схемы замещения. Отсоединяются ВСЕ вторичные обмотки. 2 В разрыв первичной обмотки включается амперметр\или миллиамперметр.\ с соответствующим пределом измерения. 3 На вход тр-ра подаётся номинальное напряжение . 4 Производится отсчёт тока хол.хода и сравнивается с требуемым,делается логическое заключение по результатам опыта.5 Измеряются напряжения на всех вторичных обмотках,сравниваются с требуемым,делается заключение.
9)
Опыт коро́ткого замыка́ния —
определение параметров элементов схемы
замещения, используемой при расчете
реальных схем, в частности,
активных двухполюсников. В опытекороткого
замыкания сопротивление внешней
цепи полагают гораздо меньшим, чем
внутреннее сопротивление источника.
Исходя из закона Ома для полной
цепи ![]() ,
при сопротивлении внешней цепи R=0, сила
тока I достигает
максимального значения. В случае переменного
тока следует учитывать реактивные
составляющие сопротивления измерительного
прибора. Целью этого опыта и является
определение параметра тока генератора
для схемы замещения.
,
при сопротивлении внешней цепи R=0, сила
тока I достигает
максимального значения. В случае переменного
тока следует учитывать реактивные
составляющие сопротивления измерительного
прибора. Целью этого опыта и является
определение параметра тока генератора
для схемы замещения.
1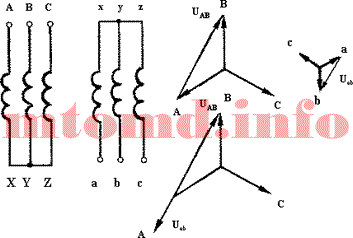
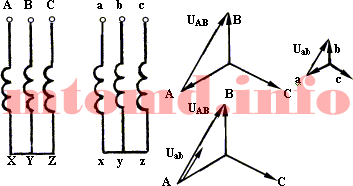 2
группа соединения обмоток трансформатора
2
группа соединения обмоток трансформатора
Рис. 2
Векторная диаграмма показывает, что сдвиг между E1 и Е2 равен нулю или 360°, т.е. (360° / 30° – 12 группа).
6 группа соединения обмоток трансформатора
10) Не всегда один трансформатор может справиться с нагрузкой от потребителей, поэтому обычно они работают параллельными группами. Но не каждый трансформатор может работать в параллельной группе с другими трансформаторами. Для параллельной работы трансформаторов необходимо чтобы они удовлетворяли следующим условиям.Равенство коэффициентов трансформации К=ВН/НН. где ВН — высшее напряжение, НН — низшее напряжение. При несоблюдении этого условия между вторичными обмотками трансформаторов будет циркулировать уравнительный ток. приводящий к перегреву трансформатора. Равенство напряжений короткого замыкания Uк %. В противном случае трансформаторы не будут загружаться пропорционально своим мощностям. При этом отношение мощностей параллельно работающих трансформаторов должно быть не больше 1 : 3, иначе для малых трансформаторов перегрузки могут оказаться недопустимыми. Одинаковые группы соединений. При различных группах соединений параллельно работающих трансформаторов между векторами их вторичных напряжений будет сдвиг фаз, вызывающий уравнительные токи между обмотками трансформаторов. При разных группах соединений, при самом малом сдвиге фаз, равном 30°, уравнительный ток превышает номинальный ток трансформатора в 5 раз, при самом большом сдвиге 180° — в 20 раз.
11)
У многообмоточных трансформаторов на
каждом стержне размещается не две, а
большее число обмоток с разным числом
витков. Это позволяет от одного
трансформатора получить несколько
напряжений и, следовательно, уменьшить
количество трансформаторов. Такие
трансформаторы выпускаются как в
однофазном, так и в трехфазном исполнении.
 Многообмоточные
трансформаторы небольшой мощности
широкое распространение находят в
радиотехнике и автоматике. В качестве
силовых применяются главным образом
трехобмоточные трансформаторы. В общем
случае обмотки многообмоточных
трансформаторов могут иметь разные
номинальные мощности (все они указываются
на табличке трансформатора). За номинальную
мощность такого трансформатора
принимается мощность наиболее мощной
обмотки. При анализе работы многообмоточного
трансформатора токи, напряжения и
сопротивления остальных обмоток приводят
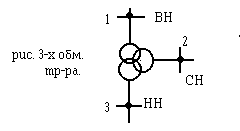
к числу витков этой обмотки. Трехобмоточный
трансформатор имеет три обмотки и
связывает сети трех напряжений.Обмотки
между собой имеют электромагнитную
связь. Условное обозначение:
Многообмоточные
трансформаторы небольшой мощности
широкое распространение находят в
радиотехнике и автоматике. В качестве
силовых применяются главным образом
трехобмоточные трансформаторы. В общем
случае обмотки многообмоточных
трансформаторов могут иметь разные
номинальные мощности (все они указываются
на табличке трансформатора). За номинальную
мощность такого трансформатора
принимается мощность наиболее мощной
обмотки. При анализе работы многообмоточного
трансформатора токи, напряжения и
сопротивления остальных обмоток приводят
к числу витков этой обмотки. Трехобмоточный
трансформатор имеет три обмотки и
связывает сети трех напряжений.Обмотки
между собой имеют электромагнитную
связь. Условное обозначение:
1 2)
Автотрансформаторы. Основные соотношения
для автотрансформаторов. Автотрансформатором
называется трансформатор, у которого
имеется электрическая связь между
обмотками (рис. 1); при этом обмотка
низшего напряжения является частью
обмотки высшего напряжения. Вследствие
такой связи мощность из первичной сети
во вторичную передается не только за
счет магнитной связи обмоток, но и
электрическим путем. Трехфазный
автотрансформатор выполнен на трех
тороидальных магнитопроводах с навитыми
на них медными обмотками, соединенными
по схеме "звезда".
2)
Автотрансформаторы. Основные соотношения
для автотрансформаторов. Автотрансформатором
называется трансформатор, у которого
имеется электрическая связь между
обмотками (рис. 1); при этом обмотка
низшего напряжения является частью
обмотки высшего напряжения. Вследствие
такой связи мощность из первичной сети
во вторичную передается не только за
счет магнитной связи обмоток, но и
электрическим путем. Трехфазный
автотрансформатор выполнен на трех
тороидальных магнитопроводах с навитыми
на них медными обмотками, соединенными
по схеме "звезда".
13) Трансформаторы со скользящими контактами. Для плавного регулирования выходного напряжения трансформатора применяют контактные щетки, скользящие по неизолированной внешней поверхности вторичной обмотки, вследствие чего изменяется число включаемых в работу витков обмотки. Трансформаторы с подвижной вторичной обмоткой. Такие трансформаторы имеют броневой магнитопровод с двумя первичными обмотками и подвижным средним стержнем, на котором размещена вторичная обмотка. Трансформаторы, регулируемые подмагничнванием шунтов. Плавное регулирование выходного напряжения трансформатора можно осуществить также путем подмагничивания его магнитопровода постоянным током.
14)
16) Трансформаторы для электросварки работают в прерывистом режиме с переходом от холостого хода к рабочему процессу горения дуги с возможными кратковременными короткими замыканиями. Для того чтобы ток короткого замыкания сварочного трансформатора не превышал номинальный более чем в 2—3 раза и при колебаниях сопротивления цепи изменялся незначительно, нужно, чтобы его сопротивление короткого замыкания было много больше, чем в обычных трансформаторах. Обычно сопротивление короткого замыкания увеличивается в сварочном трансформаторе за счет индуктивной составляющей. Для этого обмотки располагаются на различных участках магнитопровода и включаются последовательно. Дальнейшее увеличение индуктивности короткого замыкания достигается дополнительными регулируемыми реакторами, включаемыми в цепь вторичной обмотки.Для ограничения тока увеличивают индуктивное сопротивление.Устройство винт гайка позволяет регулировать воздушный зазор, минимально значению воздушного зазора соответствует наибольшее индуктивное сопротивления Дросселя, ток будет минимальным.(чем >возд.зазор тем < ток).
17) Устройство АМ: Асинхронная машина имеет статор и ротор, разделённые воздушным зазором. Её активными частями являются обмотки и магнитопровод (сердечник); все остальные части — конструктивные, обеспечивающие необходимую прочность, жёсткость, охлаждение, возможность вращения и т. п.Обмотка статора представляет собой трёхфазную (в общем случае — многофазную) обмотку, проводники которой равномерно распределены по окружности статора и пофазно уложены в пазах с угловым расстоянием 120 эл.град. Фазы обмотки статора соединяют по стандартным схемам «треугольник» или «звезда» и подключают к сети трёхфазного тока. Магнитопровод статора перемагничивается в процессе изменения тока в обмотке статора, поэтому его набирают из пластин электротехнической стали для обеспечения минимальных магнитных потерь. Основным методом сборки магнитопровода в пакет является шихтовка.По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из пластин электротехнической стали.Принцип действия: На обмотку статора подается переменное напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в них ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создает вращающий электромагнитный момент, заставляющий ротор вращаться. 18) В электрических машинах переменного тока обмотки размещают в пазах, расположенных на внутренней поверхности статора и на внешней поверхности ротора. Проводники, находящиеся в пазах, соединяют между собой, при этом образуется ряд катушек. Расположенные в соседних пазах катушки, соединенные последовательно и относящиеся к одной фазе и паре полюсов, образуют катушечную группу. Каждая фаза обмотки АХ, BY и CZ* в общем случае состоит из нескольких соединенных последовательно или параллельно катушечных групп. Параллельное их соединение применяют при больших фазных токах или при необходимости переключения отдельных катушечных групп.Простейшим элементом обмотки является виток состоящий из двух проводников1 и 2, которые размещены в пазах, находящихся друг от друга на некотором расстоянии у. Это расстояние приблизительно равно одному полюсному делению τ, под которым понимают длину дуги, соответствующую одному полюсу. Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки (рис. 3.7); иногда их называют секциями. Катушки укладывают таким образом, чтобы в каждом пазу были размещены одна сторона катушки или две стороны разных катушек - одна над другой. В соответствии с этим различают одно-и двухслойные обмотки. При q(Число пазов на полюс и фазу) = 1 под каждым полюсом расположено только по одной катушке каждой фазы. Такую обмотку называют сосредоточенной. Как показано ниже, обычно q > 1; при этом обмотку называют распределенной. Обмотки в большинстве случаев выполняют с целым числом пазов на полюс и фазу. При дробном q фазные зоны только в среднем равны π/3 или 2π/3; в реальной машине часть фазных зон меньше, а часть больше этих значений.
19) Вращающиеся магнитное поле сцепляясь с катушкой обмотки статора наводит в них ЭДС.Форма кривой ЭДС зависит от графика распределения.Даже не при равномерном воздушном зазоре график распределения остается несинусоидальным.Поэтому ЭДС катушки остается несинусоидальным. И наряду с 1ой гармоникой ЭДС содержит ряд высших синусоидальных гармоник.В связи с тем, что кривая ЭДС симметрична относительно оси абцис, она содержит только нечетные гармоники.С ростом номера гармоники, ее амплитуда уменьшается поэтому практическое значение(влияния) на форму кривой ЭДС оказывают гармоники не выше 7ого порядка.Таким образом задача получения в обмотке статора синусоидальной ЭДС сводится к устранению или к ослаблению 3ей,5ой и 7ой гармоник. Токи и ЭДС 3ей гармоники во всех фазах 3ехфазной обмотки совпадают по времени(по фазе) поэтому в линейной ЭДС при схемах соединения обмотки звездой или треугольником 3ья гармоника отсутствует.
20)
Двигательный режим Если ротор неподвижен
или частота его вращения меньше
синхронной, то вращающееся магнитное
поле пересекает проводники обмотки
ротора и индуцирует в них ЭДС, под
действием которой в обмотке ротора
возникает ток. На проводники с током
этой обмотки (а точнее, на зубцы сердечника
ротора), действуют электромагнитные
силы; их суммарное усилие образует
электромагнитный вращающий момент,
увлекающий ротор вслед за магнитным
полем. Если этот момент достаточен для
преодоления сил трения, ротор приходит
во вращение, и его установившаяся частота
вращения ![]() [об/мин]
соответствует равенству электромагнитного
момента тормозному, создаваемого
нагрузкой на валу, силами трения в
подшипниках, вентиляцией и т. д.
Частота вращения ротора не может
достигнуть частоты вращения магнитного
поля, так как в этом случае угловая
скорость вращения магнитного поля
относительно обмотки ротора станет
равной нулю, магнитное поле перестанет
индуцировать в обмотке ротора ЭДС и, в
свою очередь, создавать вращающий
момент. Генераторный режим. Если ротор
АД раскрутить приводным двигателем
когда n2>n1. Скольжение будет отрицательным,
ЭДС в обмотке ротора изменит направление,
электромагнитный момент изменит
направление(станет тормозящим). В этом
случае механическая мощность приводного
двигателя будет преобразовыватся в
Эл-ую активную мощность переменного
тока.Особенность работы асинх.генер.
состоит в том что вращающееся магнитное
поле создается реактивной мощностью в
которую АГ отдает вырабатываемую
активную мощность. Следовательно для
работы АГ необходим источник перемен.тока
для возбуждения вращающегося магн\поля
статора. Режим
холостого хода. Режим
холостого хода асинхронного двигателя
возникает при отсутствии на валу нагрузки
в виде редуктора и рабочего органа.
Из опыта холостого хода могут быть
определены значения намагничивающего
тока и мощности потерь в магнитопроводе,
в подшипниках, в вентиляторе. В режиме
реального холостого хода s=0,01-0,08. В
режиме идеального холостого хода n2=n1,
следовательно s=0 (на самом деле этот
режим недостижим, даже при допущении,
что трение в подшипниках не создаёт
свой момент нагрузки - сам принцип работы
двигателя подразумевает отставание
ротора от поля статора для создания
поля ротора. При s=0 поле статора не
пересекает обмотки ротора и не может
индуцировать в нём ток, а значит не
создаётся магнитное поле ротора.)Режим
электромагнитного тормоза
(противовключение)Если изменить
направление вращения ротора или
магнитного поля так, чтобы они вращались
в противоположных направлениях, то ЭДС
и активная составляющая тока в обмотке
ротора будут направлены так же, как в
двигательном режиме, и машина будет
потреблять из сети активную мощность.
Однако электромагнитный момент будет
направлен встречно моменту нагрузки,
являясь тормозящим. Этот режим применяют
кратковременно, так как при нём в роторе
выделяется много тепла, которое двигатель
не способен рассеять, что может вывести
его из строя.Для более мягкого торможения
может применяться генераторный режим,
но он эффективен только при оборотах,
близких к номинальным.
[об/мин]
соответствует равенству электромагнитного
момента тормозному, создаваемого
нагрузкой на валу, силами трения в
подшипниках, вентиляцией и т. д.
Частота вращения ротора не может
достигнуть частоты вращения магнитного
поля, так как в этом случае угловая
скорость вращения магнитного поля
относительно обмотки ротора станет
равной нулю, магнитное поле перестанет
индуцировать в обмотке ротора ЭДС и, в
свою очередь, создавать вращающий
момент. Генераторный режим. Если ротор
АД раскрутить приводным двигателем
когда n2>n1. Скольжение будет отрицательным,
ЭДС в обмотке ротора изменит направление,
электромагнитный момент изменит
направление(станет тормозящим). В этом
случае механическая мощность приводного
двигателя будет преобразовыватся в
Эл-ую активную мощность переменного
тока.Особенность работы асинх.генер.
состоит в том что вращающееся магнитное
поле создается реактивной мощностью в
которую АГ отдает вырабатываемую
активную мощность. Следовательно для
работы АГ необходим источник перемен.тока
для возбуждения вращающегося магн\поля
статора. Режим
холостого хода. Режим
холостого хода асинхронного двигателя
возникает при отсутствии на валу нагрузки
в виде редуктора и рабочего органа.
Из опыта холостого хода могут быть
определены значения намагничивающего
тока и мощности потерь в магнитопроводе,
в подшипниках, в вентиляторе. В режиме
реального холостого хода s=0,01-0,08. В
режиме идеального холостого хода n2=n1,
следовательно s=0 (на самом деле этот
режим недостижим, даже при допущении,
что трение в подшипниках не создаёт
свой момент нагрузки - сам принцип работы
двигателя подразумевает отставание
ротора от поля статора для создания
поля ротора. При s=0 поле статора не
пересекает обмотки ротора и не может
индуцировать в нём ток, а значит не
создаётся магнитное поле ротора.)Режим
электромагнитного тормоза
(противовключение)Если изменить
направление вращения ротора или
магнитного поля так, чтобы они вращались
в противоположных направлениях, то ЭДС
и активная составляющая тока в обмотке
ротора будут направлены так же, как в
двигательном режиме, и машина будет
потреблять из сети активную мощность.
Однако электромагнитный момент будет
направлен встречно моменту нагрузки,
являясь тормозящим. Этот режим применяют
кратковременно, так как при нём в роторе
выделяется много тепла, которое двигатель
не способен рассеять, что может вывести
его из строя.Для более мягкого торможения
может применяться генераторный режим,
но он эффективен только при оборотах,
близких к номинальным.
21) МДС обмотки статора создает магнитный поток который замыкается ч\з элементы магнитной системы АМ.Магнитная система АМ называется неявнополюсной. Магнитная система состоит из участков: зубцовый слой статора, воздуш.зазор, зубцовый слой ротора, спинка статора, спинка ротора.Замыкаясь в магн\цепи магнитный поток ч\з воз зазор, зубцовый слой статора и ротора проходит дважды.Каждый участок оказывает магн\потоку сопротивление на преодоление которого затрачивается часть МДС- магнитным напржением: ΣF=2Fσ+2Fz1+2Fz2+Fc1+Fc2 | ΣF- МДС обмотки статора на пару полюсов в режиме х.х.А остальные составляющие уравнения это магнитные сопротивления соответствующих слоев.Ад проектируют таким образом чтобы магнитная система была насыщена.
22) Фσ1 – магнитный поток рассеивания в статоре, Фσ2 в роторе. Каждый из этихпотоков сцепляясь лишь с собственной обмоткой индуцирующих в них ЭДС рассеивания.
А основной магнитный поток (Ф) будет индуцировать в статоре ЭДС – Е1
Ур-ие
для обмотки статора асинхронной машины
![]() Ротор вращается в туже сторону что и
магн\поле статора с частотой n1
Ротор вращается в туже сторону что и
магн\поле статора с частотой n1
![]() Основной магнитный поток обгоняет ротор
с частотой ns индуцирует в обмотке ротора
ЭДС (Е2s)
Основной магнитный поток обгоняет ротор
с частотой ns индуцирует в обмотке ротора
ЭДС (Е2s)
![]()
![]()
![]()
![]() Е2
это ЭДС наведения в обмотке ротора при
скольжении равном единице.Поток
рассеивания индуцирует Еσ
Е2
это ЭДС наведения в обмотке ротора при
скольжении равном единице.Поток
рассеивания индуцирует Еσ
У![]() р-ие
напряжении для обмотки ротора---
р-ие
напряжении для обмотки ротора---
23) Магн\поток в АД создается совместным действием обмотки статора и обмотки ротора F0-результир.МДС
П![]() ри
изменении нагрузки на валу двигателя
изменятся ток 1 и 2, а магнитный поток
=const, т.к U= const .
ри
изменении нагрузки на валу двигателя
изменятся ток 1 и 2, а магнитный поток
=const, т.к U= const .
![]() -
Ур-ие токов для АД. Ток ротора оказывает
на магн\сист.
-
Ур-ие токов для АД. Ток ротора оказывает
на магн\сист.
Размагничивающее действие. При изменении нагрузки на валу изменяются соответствующие тока на обмотке статора , что влечет за собой изменение ЭДС ротора, соответственно будет меняться ток ротора (I2).
24) Чтобы векторы ЭДС напряжении и токов обмоток статора и ротора можно было изобразить в одной векторной диаграмме следует. Параметры обмотки ротора привести к обмотке статора. При этом мощности фазовые сдвиги векторов ЭДС и токов ротора после привидения должны оставаться такими же как и до привидения. В отличие от трансформаторов а асинхронных двигателях коэффициенты u и I не равны, объясняется это тем что число фаз в обмотках статора и ротора в общем случае неодинаково. Каждый стержень короткозамкнутой обмотки ротора рассматривают как одну фазу поэтому кол-во витков (W2=0,5).
![]() -
уравнение напряжения для обмотки ротора.
-
уравнение напряжения для обмотки ротора.
25) Из принципа действия асинхронного двигателя известно, что для того чтобы ротор асинхронного двигателя пришел во вращение, обмотка ротора должна быть замкнута накоротко. АД при разомкнутом роторе представляет собой трехфазный трансформатор в режиме холостого хода, следовательно, для расчета параметров асинхронного двигателя можно использовать схему замещения трансформатора. При работе асинхронного двигателя ток ротора будет изменяться в зависимости от режима работы, то есть в зависимости от скольжения. Двигатель будет работать только в том случае, когда обмотка ротора замкнута. Чтобы учесть в схеме замещения влияние нагрузки на ток I2’, включаем в цепь ротора переменное сопротивление, равное по величине [(1-s)/s]•τ2’. Т-образная схема замещения асинхронного двигателя не совсем точно отражает физические процессы, происходящие в асинхронном двигателе, и поэтому не может быть использована для расчета его параметров.
Чтобы учесть влияние тока нагрузки на напряжение между точками 1 и 2 выносим намагничивающий контур на зажимы статора двигателя. Получаем схему замещения, у которой намагничивающий контур не зависит от нагрузки.Г-обр. более удобна т.к намагнич. контур выведен на входные зажимы
26. Потери и кпд асинхронного двигателя
Преобразование эл. энергии в механическую в асинхронном двигателе связано с потерями энергии. Поэтому полезная мощность на выходе двигателя всегда будет меньше, чем на входе. Р2=Р1-∑Р (Р1 – на входе, Р2 – на выходе, ∑Р – суммарные потери). ∑Р делятся на: 1. Основные (Магнитные, электрические, механические). 2. Добавочные (Трудноучитываемые потери, вызванные действием высших гармоник МДС и пульсацией магнитных индукций в зубцах). Магнитные потери: Рм=Рг + Рд. Величина магнитных потерь пропорциональна частоте перемагничивания: Рм≡fB, где B=1,3-1,5. f=f1, где f1 - частота сети; При частоте тока в сети равной 50 Гц и скольжении S ном = 1-8 %, частота перемагничивания ротора равна частоте тока ротора. При этом: f = f2 = 2 … 4 Гц Поэтому магнитные потери в сердечники ротора так малы, что их не учитывают ВООБЩЕ. Электрические потери в асинхронных двигателях вызваны нагревом обмоток статора и ротора, проходящими по ним токами. Величина этих потерь пропорциональна I2. Pэ1=m1*I12*r1; Pэ2=m2*I22*r2=m1*I2’2*r2’, где r1 и r2 – активные сопротивления обмоток фаз статора и ротора соответственно, пересчитываемые на рабочую температуру. Эл. потери в роторе пропорциональны скольжению: Pэм=Р1 – (Рэ1 + Рн). В асинхронных двигателях с фазным ротором помимо перечисленных потерь имеют место электрические потери в щёточном контакте. Механические потери – потери на трение в подшипниках и на вентиляцию. Величина механических потери пропорциональна квадрату частоты вращения ротора: Pмех≡n22. В АД с фазным ротором механические потери происходят ещё за счёт трения между щётками и контактными кольцами. ДОБАВОЧНЫЕ ПОТЕРИ: в соответствии с тостом принимают 0,5% от подводимой к двигателю мощности: Рдоб = 0,005-Р1. ∑Р=Рэ1+Рн+Рэ2+Рмех+Рэщ+Рдоб. n=P2/Р1=(P1-∑Р)/Р1=1-(∑Р/Р1). Электрические и добавочные потери являются переменными, т.к. их величина зависит от нагрузки двигателя, т.е. от значений токов статора и ротора. Магнитные и механические потери являются постоянными. Они практически не зависят от нагрузки. Исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения. КПД асинхронного двигателя с изменением нагрузки тоже меняет свою величину. В режиме холостого хода КПД=0; С ростом нагрузки КПД увеличивается, достигая максимального значения при нагрузке: Рном = (0,7 … 0,8). При дальнейшем увеличении нагрузки КПД незначимо увеличивается. При перегрузке (Р2>Рном), КПД незначимо увеличивается. При перегрузке (Р2>Рном), КПД резко убывает, что объясняется ростом переменных потерь (Р1, Р2, Рдоб). Для двигателей мощностью от 1 до 10 кВт КПД составляет 75-88%, а для двигателей свыше 10 кВт – КПД=90-94%.
27. Механические характеристики ад
[1] Мэм = m1*U12*r2’*p / 2пf *S[(r1+r2’)2+(x1+x2’)2]; [2] Sкр = r2’ / x1+x2’; [3] Мп = m1*U12*r2’*p / 2пf [(r1+r2’)2+(x1+x2’)2]; [4] Mmax = m1*U12*p / 2пf (x1+x2’); Из формул 1,3,4 видно, что электромагнитный момент, максимальный момент и пусковой момент пропорциональны квадрату напряжения сети: Мэм; Мп; Ммах ≡ U12. А из формулы 2 видно, что скольжение не зависит от напряжения. Это даёт возможность построить механическую характеристику М=f(S). Для различных напряжений U1, из которых следует, что колебания напряжения сети относительно его номинального значения сопровождается не только изменениями пускового и максимального момента но и изменениями n2. Т.к. значение Мmax изменяется, то это означает, что изменение напряжения влияет также на перегрузочную способность. C ↓U1 -> n2 ↓ и S ↑→ ᴧ= Mmax / Mном. Из формулы 4 следует что Мmax двигателя не зависит от r2’.
28. Регулирование частоты вращения асинхронного двигателя. Регулирование изменением U1.
29. Регулирование частоты вращения асинхронного двигателя. Регулирование симметрии подводимого напряжения.
30. Регулирование частоты вращения асинхронного двигателя. Регулирование изменением сопротивления в цепи ротора.
31. Регулирование частоты вращения асинхронного двигателя. Регулирование изменением частоты тока статора.