

Билет 12
1) В явнополюсных синхронных машинах (СМ) воздушный зазор не является постоянным из-за наличия большого межполюсного пространства. Синусоидальная кривая основной первой гармоники намагничивающей силы реакции якоря взаимодействует с основной первой гармоникой намагничивающей силы, при этом создается результирующая намагничивающая сила, ось которой смещена по отношению к осям полюсов синхронной машины (СМ). В синхронном генераторе (СГ) – против направления вращения, в синхронном двигателе (СД) – по направлению вращения.
При этом амплитуда реакции якоря по продольной оси равна:
Для составляющих намагничивающей силы обмотки возбуждения справедливы следующие формулы:
(9)
коэффициент приведения НС реакции якоря по продольной оси к НС обмотки возбуждения ( коэффициент продольной реакции якоря);
kf-коэффициент формы поля возбуждения;
kd-коэффициент формы поля продольной реакции якоря.
Отсюда можно получить значение составляющей тока обмотки возбуждения по продольной оси:
(10)
Ead пропорциональна Fad и соответственно Id. Откуда:
где Xad – индуктивное сопротивление якоря СМ по продольной оси.
(12)
D-диаметр ротора СМ;
lδ-длина пакета СМ;
kδ-коэффициент зубчатости;
kμ-коэффициент насыщения.
То есть Xad зависит от конструктивных параметров синхронной машины (СМ).
Величина индуктивного сопротивления якоря по поперечной оси определяется соотношением:
(13)
Здесь коэффициенты Кd, Кq, К , К для равномерных зазоров под полюсными наконечниками приводятся в специальных расчетных таблицах.
В реальных синхронных машинах (СМ) воздушный зазор под полюсным наконечником выполняется, как правило, неравномерным, а увеличивающимся по направлению к концам полюсов, для уменьшения высших гармоник магнитного потока.
Соответствующая ЭДС реакции якоря по поперечной оси:
(14)
2) Двигательный режим (0<s< 1). Схема замещений асинхронной машины отражает все основные процессы, происхбдящие в ней, и представляет собой удобную осно,ву для изучения режимов работы машины. Рассмотрим, имея в виду схему: замещения рис. 24-6, процесс преобразования активной энергии и мощности при двигательном режиме работы асинхронной машины. В этом режиме передача энергии в схеме рис. 24-6 совершается слева направо.
Асинхронный двигатель потребляет из сети активную мощность
![]()
![]()
Соотношение (24-74) совпадает с (24-24).
Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рнх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются), магнитных потерь в сердечнике ротора ржП и добавочных потерь рд. Последние вызваны в основном
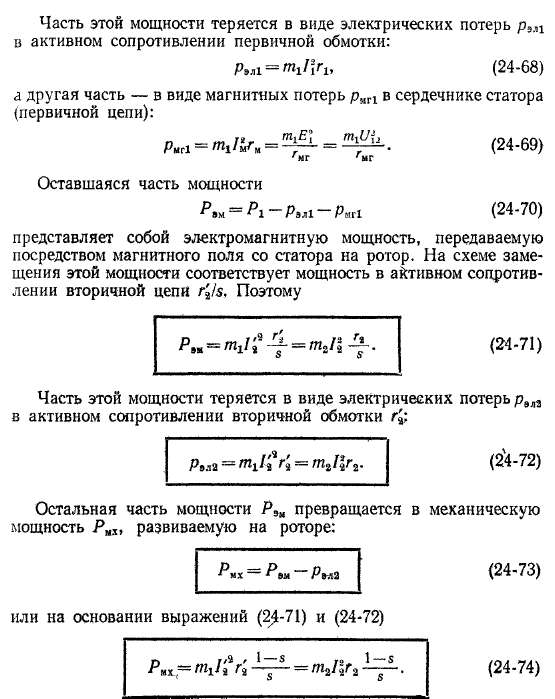
высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник н. с. обмоток и зубчатого строения статора и' ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационны-ми потерями. Магнитные потери в сердечнике ротора при нормальных рабочах режимах обычно очень малы и отдельно не учитываются1;
Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений гх и г2 и поэтому в величину рд не включают.
Полезная механическая мощность на валу, или вторичная мощность,
В соответствии с изложенным на рис. 24-9, а изображена энер* гетическая диаграмма асинхронного двигателя. Сумма потерь двигателя
К. п. д. двигателей мощностью Рн = 1 -т- 1000 кет при номинальной нагрузке находится соответственно в пределах т]н =

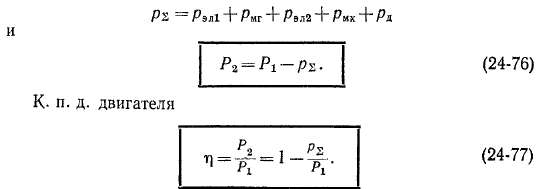
= 0,72 н- 0,95. Более высокие к. п. д. имеют двигатели большей мощности и с большей скоростью вращения.